


Hardware components | ||||||
| × | 1 | ||||
| × | 1 | ||||
| × | 2 | ||||
 |
| × | 6 | |||
 |
| × | 24 | |||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
 |
| × | 1 | |||
| × | 1 | ||||
| × | 3 | ||||
| × | 8 | ||||
| × | 7 | ||||
 |
| × | 2 | |||
Software apps and online services | ||||||
 |
| |||||
| ||||||
1.Concept
Due to the COVID-19 pandemic there is global interest in disinfecting surfaces. As society starts to safely reopen commercial, transportation and education spaces it requires large-scale cleaning solutions. Most solutions are electrostatic sprayers, fogging machines, and manual wiping. This requires a large supply chain of chemicals and cloth products.
A largely untapped solution is UVC light, which only requires electricity and bulb replacements. There are a few reasons why UVC light is not deployed. The light that breaks down the RNA in viruses is also detrimental to humans. There is also a long exposure time to disinfect. This means the light source would need to be held at various positions to expose tables, doors, and chairs. UVC also follows the inverse square law which results in less intensity the farther it is from the light source. 2 meters away would receive 1/4 (25%) of the original intensity at 1m, 3 meters away would receive 1/9 (11%). To cover a room multiple positions and duration would be required.
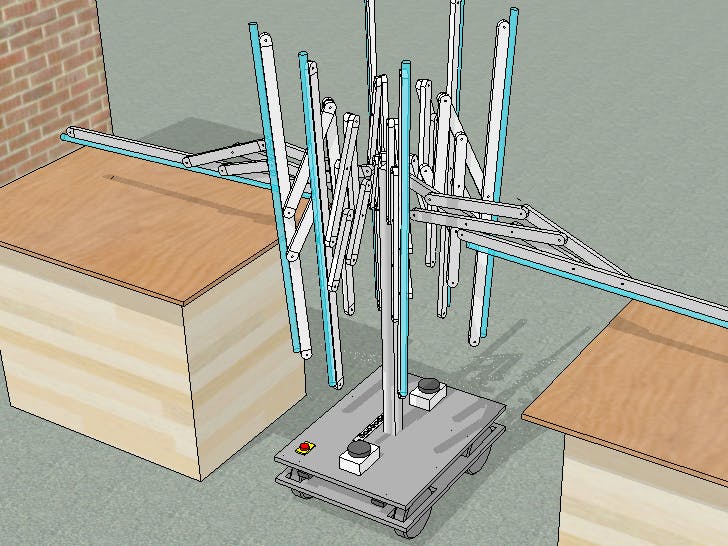
We can solve these problems by adding the UVC lights onto a mobile robot so the operator can avoid. The robot would keep the user notified when the UV lights are on with visual and audible alerts. Also and motion sensors mounted on the robot will turn off the lights if it detects a person entering the room while it is in UVC mode. We can reduce the operating time by ensuring the UVC lights are positioned close to the high touch areas increasing UVC dosage. Adding a robotic arm on each UVC light will allow us to accomplish this.
1.1 Concept Photo GalleryLength = 29"Width = 22.5"Height = 72"Weight = 150 lbs ( 113lb calculated 37lb unaccounted margin)
3.Operating System
LIDIA will use Ubuntu 20.04.1 LTS Server Edition (Focal Fossa). Ubuntu is the recommended OS for the software platform and choosing the long-term support version allows for greater stability of the base system.
3.1ROS
The base framework to control the robot and cleansing operations will be Robot Operating System (ROS). It provides an extensive set of libraries to provide support for active and passive sensors, camera systems, and data recorders. Custom extensions can be written to manage add-ons as needed, for LIDIA this will be used to control the umbrella motion and activation.
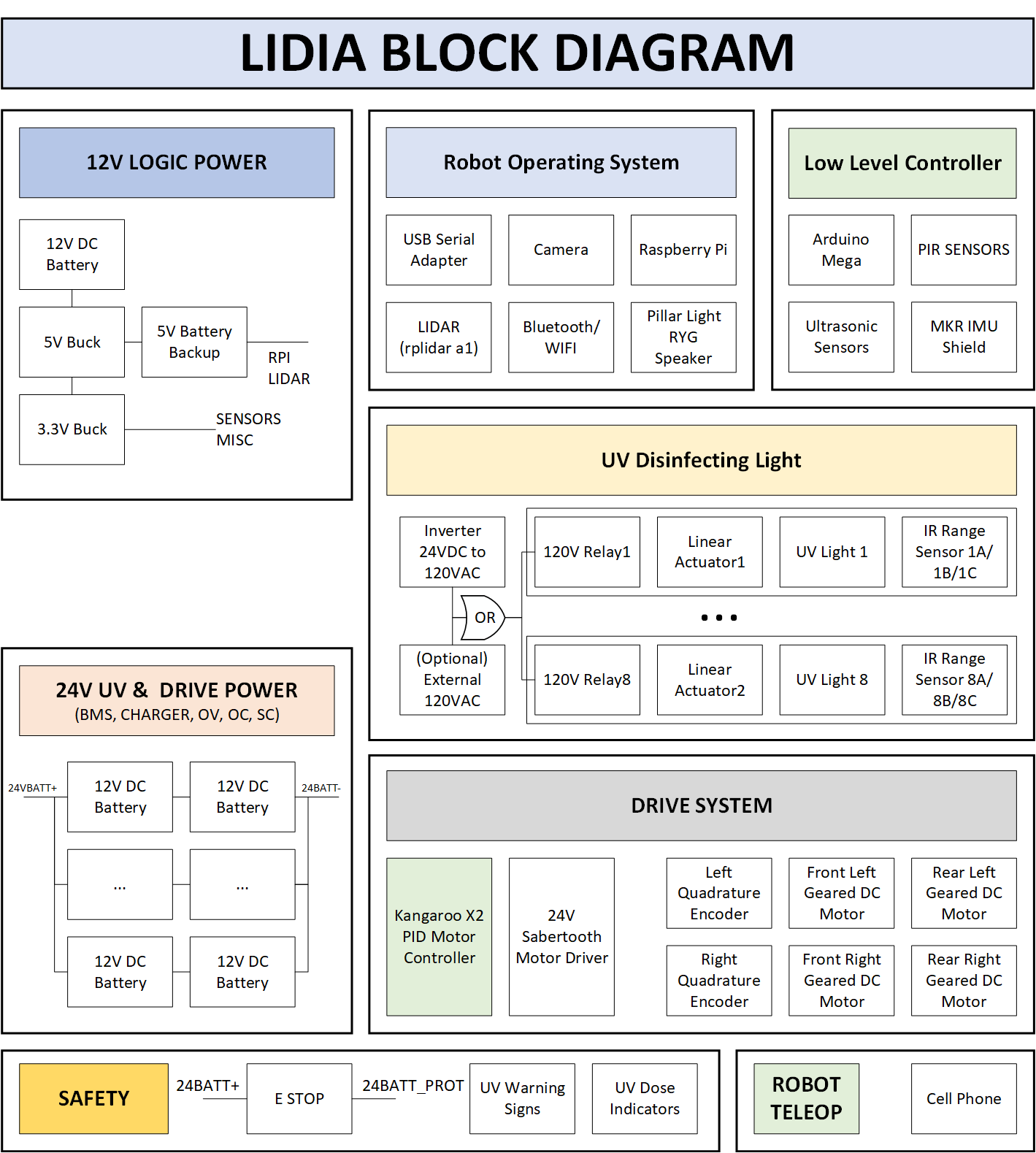
The low level controller of the system will coordinate the movement and the sensors. It will control the drive using the X2 controller, arms, range sensors and exposure via relays.
The robot arms utilize simple linear actuators so a relay block can be used instead of a full motor controller.
4.Motion Platform
A commercially available robotic platform from Super Droid Robotics will be used. It provides a base that is approximately 18 by 15 inches and offers a high wheelbase of 6 inches providing a stable base for mounting of the UVC system. It is made from strong but lightweight aluminum and offers rigid mounting points for the light tower.
4.1Motors
Four brushed 24 VDC IG42 motors, geared to 122 RPM, will drive the robotic system with skid steering. These will each include a Quadrature Encoder wired for wheel shaft rotation monitoring. This information will be fed into the robot positioning algorithms.
4.2DriveFor this system a Sabertooth drive with a Kangaroo X2 PID controller was chosen. This solution has been available for over a decade and used in many robotics platforms. This allows easy positioning using serial commands to control the robot reducing the burden on the micro controller.
4.3Wheels
For the robot platform to be the most effective it should be practical and able to navigate commercial terrains such as carpet, tile, asphalt and concrete. The robot should also be able to handle the real world environment and navigate small inclines and bumps found in common floor transitions and curbs.
Mecanum wheels offer excellent control, however they are higher cost and offer no local repair options. Lower cost Mecanum wheels also perform poorly on concrete and asphalt.
Swerve drive or caster based swivel options also mar quickly on concrete and have a tendency to snag on small edges.
We found from our experience with robotics rubber pneumatic tires are the best real world solution. They come in multiple sizes and repair kits can be sourced in any bicycle or hardware store. The tires are typically reinforced and the inner tube is available at most hardware stores.
Below is a demo video from the fabricator of the super droid platform. Note the high base, ability to turn on its center axis and perform wide turns.
5.Power
Power is provided to the robot using 12V SLA Batteries in series to provide 24V. The motion system and the inverter for the UVGI lamp are powered by the large 24V bank.
The main system for the OS and controllers are powered by an isolated 12V SLA and converted down to the lower logic voltages for sensors.
Two chargers are provided for both. A 24V battery charger with balancer is provided for the drive and disinfecting platform. A 12V battery charger is provided for the OS and electronics. The 12V system has a battery life of 8 hours. The 24V system can be supplemented with AC or operate for 30 min in a wireless mode.
6.UVGI
The UV germicidal light source is chosen as a generic COTs component precertified for disinfecting use.
The UVGI lamp's chassis is mounted to the robot’s removable aluminum extrusion rail. This allows the entire lamp housing to be removed from the robot to introduce a spare.
The UVGI lamp is plugged into an array of 120V outlets on the robot base. These outlets are controlled by the microcontroller via 120V AC relays.
The lamp hours are stored in nonvolatile memory in the microcontroller. The OS can then recall this as needed to report when the lamp is near its EOL.
The lamp can be powered by the 12V SLA or the outlet. The robot is powered by the 12V SLA or a AC DC supply. Neither the motors or the UVGI is powered at the same time to reduce the overall load
6.UVGIDosing Verification
Dosing and complex geometry is not practical for commerical applications. Also many times there can be confusion over the watts of the power in versus the optical energy. In order to reduce confusion a verified sensor would need to be included in each test. Most UVC sensors are in the $400-1000 range. In order to make it more tangible UVC dosimeters cards can be placed into each room to provide the customer positive confirmation each room was dosed properly.
7.Navigation
7.1 SLAM (Simultaneous Location and Mapping)To provide a map for the robot we will request a floor plan from the commercial space in the quoting process. The operator will use a cell phone and this floor print to generate a path to be loaded into the robot using the web interface. This profile could be saved and a job worksheet will include a QR code to be scanned in order to recall the saved profile as the site planner may not be the operator.
7.2 Sensors7.2.1 LIDARTwo LIDAR systems are mounted on the third third of the chassis to provide mapping functionality. With more time and rotation of the robot the system can be optimized to only use 1 LIDAR to save costs. These connect over USB to the Raspberry Pi.
7.2.2 IRRange Finder
IR distance sensors will be mounted on the articulated UVC ARM allowing the arm to conform to the room without causing collisions. These will be used when the UVC light is not active and protect the light tubes from being damaged. There will be three IR distance sensors on each arm, totaling 24 total on the robot.
These sensors will allow us to detect if the robot has tipped or if it is near a ledge like a stair case.
7.2.4 Inertial Nav SystemA gyro, magnetometer, and accelerometer will form a navigation system for dead reckoning if needed. Dead reckoning is the process of calculating one's current position by using a previously determined position, or fix, by using estimations of speed and course over elapsed time. [wikipedia] In addition the system will aid in making precision turns.
8. Connectivity8.1. WifiThis is used to load configs, paths, watch the robot, etc. The Raspberry Pi contains a built in 802.11ac Wi-Fi adapter for control and reporting.
8.2 BluetoothThe Raspberry Pi also has an internal Bluetooth 5.0 adapter that is co-located with the Wi-Fi. This will be used to initiate the Wi-Fi and provide the ability to alternatively control or debug operations.
9. VisionA Raspberry Pi High Quality Camera will be integrated into the system to integrate into collision detection using OpenCV. It will also be used to read QR Codes for tasking and control of the robot.
This system can also offer a RTSP video stream to monitor or navigate the robot remotely.
QR Codes are used to quickly identify rooms or sections about to be cleansed. This offers an absolute verification system for the robot.
10. Mobile ApplicationThe mobile application will be provided to load tasks and basic paths to follow. Bulb life, dosage times, and other data reporting will be displayed to the operator.
11. LogisticsLIDIA is designed to be transported easily using commercial vans so one or many can be deployed at an office.
All commercial offices will have floor plans. These will be scanned for the initial quote and adjusted with a site visit.
A user with a mobile phone can also create a path for the cleaning robots to traverse. The LIDIA robots will automatically follow the rough path and avoid obstacles and deploy conformal cleaning arms to match the contour of the room for the highest UV dose and fastest overall cleaning.
The robot will transition between umbrella mode and travel mode between each cleaning waypoint. Using the IMU, encoders, LIDAR to achieve SLAM the robot will navigate the preplanned route. Using computer vision and proximity sensors LIDIA will identify high touch areas and apply concentrated cleaning.
The initial test run will navigate the office to ensure the robot can traverse the path and to identify the AC outlets where available.
Special attention will be applied to high touch areas such as desks, chairs and doorways.
The human operator will ensure that the path of the robot is clear of obstructions and that the entryway doors are propped in the optimal position.
LIDIA will be equipped with tower lights and audio feedback to notify the operator and anyone in the facility of the cleaning. Also, the smart phone application will display the position of the robots.
In order to conserve battery life, the LIDIA robots will offer the option to power the UV lights and motor mechanism off internal 24VDC batteries or external 120VAC. Using the 120VAC is optimal, but not always available in all rooms or sites.
12. Safety12.1Lamp Safety
The software will employ certain rules to avoid collisions.
1) The lamps will not be on when the robot is in motion, this will prevent accidental exposure
2) The robot will only move when the arms are in the upright position
12.2Collision Detection
The micro controller will perform the basic collision detection via IR sensors mounting on the front of the robot. This will ensure that the robot does not collide with people. Also as a general safety the robots speed can be controlled accurately using the Kangaroo X2 controller to ensure the speed is limited during cleaning.
12.3Eye Safety is important as with UV light you do not have a natural blink response. We must ensure that the maintainers are properly protected and so an industry standard Andon tower light will indicate when the UV light will enable. When the robot is irradiating there will be a speaker announcement counting down when UV will be turned on and a notification while UV light is disinfecting. This will allow the platform to comply to Americans with Disabilities Act (ADA) requirements of offices, schools and transportation use.
The UV timer is limited to a max continuous dose via a hardware timer in the micro controller. If the max continuous dose is reached (30min) it will require human interaction to extend the dose timer.
PIR motion sensors are mounted on the top of the robot pillar and allow the robot to sense if any motion is occurring while it is dosing the room. If there is the robot can stop the cleaning process.
12.4 Emergency StopThe safety switches will be located at the front and rear of the robot. These button sever power for the motors and the UVC system at the battery source.
Since the embedded system is on its own power source the fault can be reported via the smart phone utility that some interference has occurred.
12.5 Safety EquipmentIn order to properly work with UV the maintainer will need to have proper personal protective equipment.
Proper certified eyewear, gloves and skin protectors are needed.
Cotton gloves are needed in order to properly handle the UVC lamps. Fingerprints that could diminish the light output.
Proper ventilation is also a must even for ozone free lights
source [link]
13. COSTThe overall cost of the robot is estimated at $6661.83 without accounting for assembly labor. The BOM attachment describes the key costs along with some estimated costs for items that were not quoted.










{kind=link}
Comments