Project Overview
In the process of designing and building a Bluetooth controlled vehicle, I learned a lot. In the past few weeks, I experimented with various chassis designs, built a wired pushbutton remote controller, and upgraded the vehicle to a Bluetooth control system. The vehicle utilizes differential steering, with two motor driven wheels in the front and two marble casters in the back. The STL for the marble casters can be found on Thingiverse. I used generic glass marbles, but the STL may have to resized to fit other marbles. An excellent tutorial about controlling dual motors with the L298 motor controller can be found here.
The previous steps in my prototyping process for this vehicle are linked below:
Stage 1: Initial Chassis Concepts
Stage 2: Implementing Basic Functionality
Stage 3: Creating a Pushbutton Remote Control
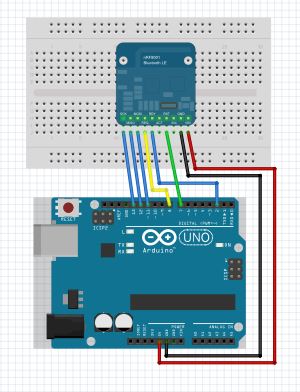
Stage 4: Upgrading to Bluetooth Control
Redesigning the Chassis
After achieving the desired functionality of my vehicle, I moved on to design an unique chassis. A laser cutter was perfect for scoring the material, and creating smooth and clean curves. I also found that an x-acto knife and a hard dull edge (I used the rounded tip of my scissor blade) were extremely handy in making the initial quick prototypes. In my designs, I used construction paper, cardboard and mat-board
While the design looked interesting, I still wasn't satisfied. Returning to the drawing board, I remembered that I designed a previous iteration of my vehicle to resemble a parade float for the upcoming holidays. Building upon that idea, I researched various modular origami designs.
My final chassis design is achieved by interlocking modular pieces of stiff construction paper. The motors and electronic components are mounted to a hidden wooden frame. I found that smaller sized units could create sharper curves and smaller diameters. In the end, I used slightly larger units to create an intriguing design of sweeping curves, multi-petaled circular swirls, and variation of light and shadows. The chassis design looks like a flower about to bloom, and reminds me of Cinderella's golden carriage.
Another change I made this time was to use various sized wheels. I had 3D-printed all of my previous wheels, so I was interested if seeing store-bought Actobotic wheels would make a significant improvement. The Actobotic wheels looked very nice, however, the benefit of 3D modeling my own wheels is that I am able to customize the diameter of the wheel, as well as the amount of traction and tires and the length of the axle.
I had a lot of fun with this project, so here's a video of my mini-parade float in action!


.jpg?auto=compress%2Cformat&w=900&h=675&fit=min)
_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff)










{kind=link}

Comments