I designed the vehicle after a parade float. With a rectangular shaped chassis and eye-catching decorations on top, you can drive a miniature parade float just in time for the holiday parades.
Underside of Vehicle
The remote controlled vehicle is driven by two motorized wheels and two marble casters. I designed and 3D printed the wheels in Autodesk Fusion360 and the caster STL file can be downloaded from http://www.thingiverse.com/thing:8959. Rubber bands around the wheels provide traction for the vehicle and the 3D printed casters work very well (can be scaled to fit different sized marbles).
The simplicity of the external appearance hides the complexity of the internal components. The lid of the box closes smoothly and stays secure, thanks to 3 pairs magnets glued to the lid and chassis. The reason behind using 3 pairs of magnets rather than 4 pairs, is to have just enough force to lock the lid in place while also allowing for convenient removal (to replace batteries and turn on/off the vehicle). I considered using clips and fasteners, but decided on using magnets for a seamless look.
Magnetic Attachments
1 / 3 • Battery pack fits under the Arduino
The internal components are neatly packed into the body of the vehicle. Press-fit wooden dowels separate the components and keep them in place while the vehicle is moving. I also used hot glue to strengthen the wooden separators. I was able to customize the length and placement of the wooden dowels so that everything fit together while also leaving room for the 9V battery to connect to the Arduino.
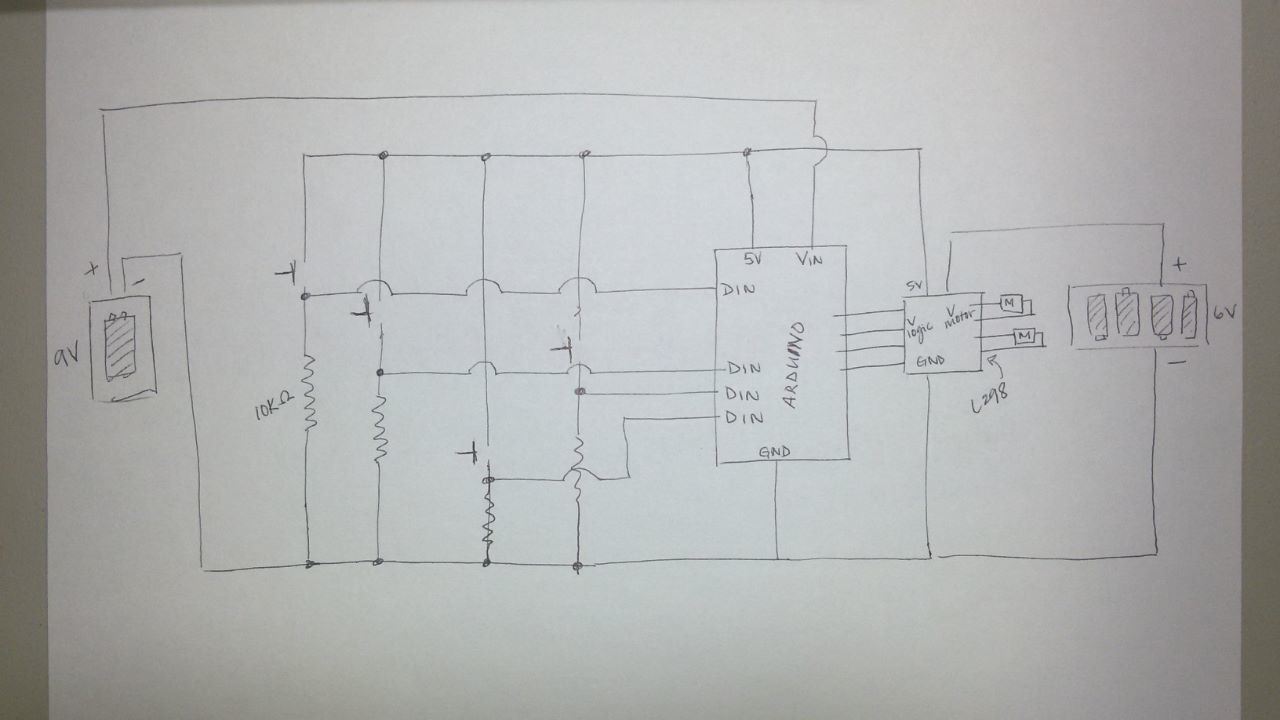
All the wires are soldered to the Arduino prototyping shield (circuit schematic can be found in my previous project which is linked at the top of the page). Following convention, I used red wires for 5V and black wires for Ground. The other connections use different colored wire. Solid core wire was used for board-to-board connections. The leash connecting the vehicle to the remote is stranded electrical wire, which I looped around a 3D printed ring to distribute the force of picking up the vehicle by its leash. When soldering everything, I noticed that the solid core wire (after being soldered to the shield) was very fragile, and bending the wire slightly would cause it to break off. Individual strands of the stranded wire tended to fray and would also break off. I was able to work around the difficulties of using stranded wire by applying a small amount of solder to the ends of the wire to glue the strands together.
Remote Control Design for Laser Cutting
The remote controls the forward, backwards, and rotating (Left and Right) motion of the vehicle. Two laser cut pieces of wood sandwiches a PVC electric connector. The remote features 4 buttons. Each pair of buttons control the forwards and backwards motion of one of the wheels. The Arduino kit only comes with small switches, so I bought larger buttons for the remote. The large blue buttons are ergonomic and quite fun to play with.
The laser cut holes for the buttons are intentionally a bit larger than the button. The button comes in two pieces, the blue button cap and the push button mechanism at the bottom. If the laser cut holes were smaller, the button wouldn't be able to "click" because the wood between the button cap and push mechanism is too thick for the button to be pressed down. To work around this, I glued a thin piece of sturdy cardboard from a cereal box to the bottom of the wood to secure the buttons. The cardboard worked really well and left plenty of clearance for the buttons to work.
Inside of the Remote Control
The PVC electrical connector reduces some of the tension on the wiring and keeps everything organized. I also looped the group of wires forming the leash around one of the spacers to prevent someone from accidentally pulling out all the wires from the remote.
Spacers and screws used in the Remote
I used aluminum spacers to strengthen the structure of the remote, while also leaving room for connecting the buttons and electrical wiring. The spacer is threaded on the inside, allowing me to attach a screw to each end of the spacer to fasten the top and bottom half of the remote. The aluminum spacer also gives the remote a clean look.
Vehicle in Action
I had a lot of fun driving my remote controlled parade float! The vehicle moves forwards, backwards, and spins in circles! Check it out below.
Each button controls a function of the wheels (Forward/Backwards of Left wheel & Forwards/Backwards of Right Wheel)
//2-Way motor control - Jennifer Chen//Remote Control VehicleintmotorPin1=8;// One motor wire connected to digital pin 8intmotorPin2=9;// One motor wire connected to digital pin 9intmotorPin3=10;// One motor wire connected to digital pin 10intmotorPin4=11;// One motor wire connected to digital pin 11intbuttonPin1=4;intbuttonPin2=5;intbuttonPin3=7;intbuttonPin4=6;//initial button states are 0, not pressedintbuttonState1=0;intbuttonState2=0;intbuttonState3=0;intbuttonState4=0;// The setup() method runs once, when the sketch startsvoidsetup(){// initialize the digital pins as an OUTPUT:pinMode(motorPin1,OUTPUT);pinMode(motorPin2,OUTPUT);pinMode(motorPin3,OUTPUT);pinMode(motorPin4,OUTPUT);//initialize the button pins as INPUT:pinMode(buttonPin1,INPUT);pinMode(buttonPin2,INPUT);pinMode(buttonPin3,INPUT);pinMode(buttonPin4,INPUT);}// the loop() method runs over and over again,// as long as the Arduino has powervoidloop(){buttonState1=digitalRead(buttonPin1);buttonState2=digitalRead(buttonPin2);buttonState3=digitalRead(buttonPin3);buttonState4=digitalRead(buttonPin4);//Left wheel backwardsif(buttonState1==HIGH){digitalWrite(motorPin1,HIGH);//backward ondigitalWrite(motorPin2,LOW);//forward offif(buttonState3==HIGH){digitalWrite(motorPin3,HIGH);//Right wheel backwarddigitalWrite(motorPin4,LOW);}elseif(buttonState4==HIGH){digitalWrite(motorPin4,HIGH);//Right wheel forwarddigitalWrite(motorPin3,LOW);}}//Left wheel forwardsif(buttonState2==HIGH){digitalWrite(motorPin2,HIGH);//forward ondigitalWrite(motorPin1,LOW);//backward offif(buttonState3==HIGH){digitalWrite(motorPin3,HIGH);//Right wheel backwarddigitalWrite(motorPin4,LOW);}elseif(buttonState4==HIGH){digitalWrite(motorPin4,HIGH);//Right wheel forwarddigitalWrite(motorPin3,LOW);}}//Right wheel backwardsif(buttonState3==HIGH){digitalWrite(motorPin3,HIGH);//backward ondigitalWrite(motorPin4,LOW);//forward offif(buttonState1==HIGH){digitalWrite(motorPin1,HIGH);//Left wheel backwarddigitalWrite(motorPin2,LOW);}elseif(buttonState2==HIGH){digitalWrite(motorPin2,HIGH);//Left wheel forwarddigitalWrite(motorPin1,LOW);}}//Right Wheel forwardsif(buttonState4==HIGH){digitalWrite(motorPin4,HIGH);//forward ondigitalWrite(motorPin3,LOW);//backward offif(buttonState1==HIGH){digitalWrite(motorPin1,HIGH);//Left wheel backwarddigitalWrite(motorPin2,LOW);}elseif(buttonState2==HIGH){digitalWrite(motorPin2,HIGH);//Right wheel forwarddigitalWrite(motorPin1,LOW);}}delay(10);//turn all motors off and wait for next commanddigitalWrite(motorPin1,LOW);digitalWrite(motorPin2,LOW);digitalWrite(motorPin3,LOW);digitalWrite(motorPin4,LOW);}



_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff)





{kind=link}

Comments