



Hardware components | ||||||
| × | 1 | ||||
 |
| × | 1 | |||
| × | 1 | ||||
Software apps and online services | ||||||
| ||||||
The development of robotic technology and artificial intelligence is advancing rapidly, from robot kinematics, machine vision, deep learning to mapping navigation. Since projects based on ROS went mainstream, the bar has been raised for choosing an educational robot platform.
When I learned about the release of JetHexa, I immediately visited its product page and reached out to their customer service team. Therefore, I am 100% convinced that this unique hexapod bionic robot that is capable of mapping navigation, deep learning and recognition, is precisely what I require.
01 Cool AppearanceSubstantial, exquisitely crafted with neat wiring and cool appearance, JetHexa looks less like an educational product. Hiwonder is a leading company in the field of bionic robot research and development, and its hexapod robots are its 'trump card'. JetHexa's body structure is flawless and its motion performance doesn't hold it back.
JetHexa can be seamlessly switched between tripod gait and ripple gait. Its height, speed and tilt angle can be easily configured. Furthermore, its 18 degrees of freedom (DOF) enables superior mobility performance and unparalleled adaptability to complex terrain, making it stand out among other forms of robots. With these features, JetHexa greatly enhances the scope of research in the field of bionic robot kinematics.
Each joint responds quickly with almost no delay as built-in acceleration sensor completes calculation. This real-time posture detection and adjustment strengthen its maneuverability in diverse environments, making it especially valuable for mapping navigation, as we will discuss later. Stable and smooth movement is a prerequisite for accurate Lidar scanning.
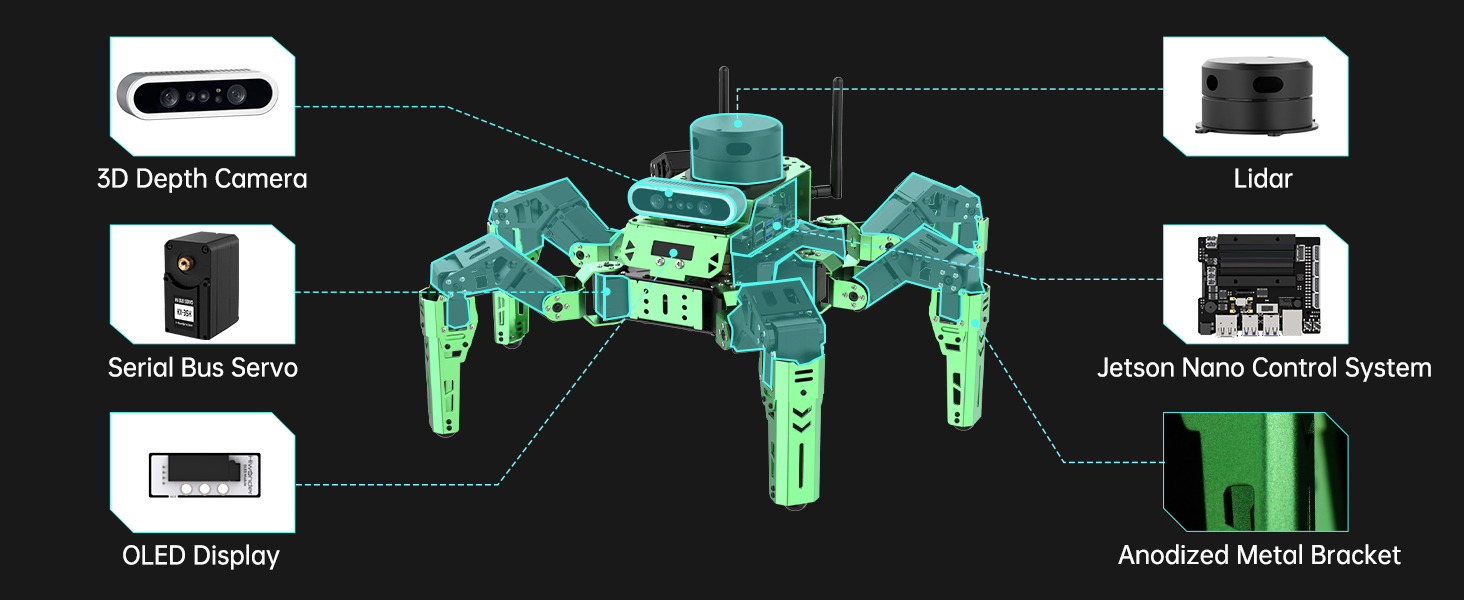
I think JetHexa's most prominent feature is its integration of Lidar, depth camera, and hexapod robot. Although laser scanning, mapping and measuring of Lidar are increasingly common in practical application scenarios, the combination with a hexapod robot is a novel approach that I have never seen before.
The hexapod robot's key advantage lies in its ability to traverse any terrain and reach places that other robots cannot. Additionally, it has a wider scanning range. However, ensuring stable movement is crucial for accurate data measurement by Lidar. Fortunately, Hiwonder's gait algorithm effectively addresses this challenge.
Added a depth camera, JetHexa's mapping and navigation capabilities have been taken to the next level. Integrating 3D vision mapping with Lidar laser scanning, it is a comprehensive device fulfills your needs for learning SLAM and autonomous path planning. In addition, the ROS framework is available to assist you in getting started quickly and connect the dots.
The depth camera of JetHexa is highly proficient at recognizing both objects and human features, adding further value to JetHexa's man-robot applications. This is bolstered by the impressive computing power of Jetson Nano. However, Hiwonder's efforts do not end here. It is highly likely that Hiwonder will introduce more robots in the future, powered by even more advanced controllers.
To fully explore the capabilities of ROS robot, relying solely on APP control is insufficient. JetHexa also offers PC software control developed by Hiwonder. This software has a simple interface, clear labeling and various buttons and sliders to adjust all controllable units.
Creating a simulation environment in ROS where the model perfectly replicating the real JetHexa is provided, greatly reduces the needs for scenario development. Moreover, all source codes are open to simplify programming. Whether it's the hardware configuration or hardware development, Hiwonder's JetHexa is truly outstanding!








{kind=link}
{kind=link}
{kind=link}
Comments