


Hardware components | ||||||
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
Software apps and online services | ||||||
 |
| |||||
Hand tools and fabrication machines | ||||||
 |
| |||||
Our open source hexapod project has now been built by over two thousand people worldwide, and we're keeping it fun and useful by releasing this cool grip arm project. Like the hexapod itself, all structural parts are easy to 3d print, all electronics are off-the-shelf standard or open source parts, nothing proprietary, and all 3d models, source code, and build instructions are open source and publicly posted.
Although this was designed to interface with the accessory port on Vorpal The Hexapod, because the 3D models are all posted publicly it shouldn't be too hard to adapt it for other robot systems.
Information on Vorpal The Hexapod is here: Vorpal Hexapod Project Page
CapabilitiesThe arm uses two micro servos. It can lower almost to the ground (2cm or about an inch) and can raise up to about the top of the robot's cap. The claw on the end of the arm can open and close. It can grab objects up to about 6cm wide (a bit over 2 inches) and can safely lift objects up to about 100 grams (roughly 4 ounces).
Parts and AssemblyThe build process is pretty straightforward and we have complete instructions posted here: Grip Arm Build Instructions
The assembly page has a complete bill of materials. We use one metal gear mini servo (MG90 or similar) and one plastic gear servo for the claw (SG90 or similiar). The claw doesn't lift much weight and the SG servo is much lighter so it's the right choice for the claw. The arm needs to lift weight that's far from teh servo, it needs metal gears to stand up to the stress. You also need some servo extension wires, screws, washers, and 6mm nylon spacers. There's nothing proprietary.
The project is open source so you're welcome to source all your own parts. If you'd like to support our development efforts, we have very convenient kits here for both the grip arm and hexapod: Vorpal Kits NOTE: there are a lot of counterfeit MG90 and SG90 servos out there that are very low quality. We are an authorized Tower Pro vendor and our servos are real and work far better than the fakes. Be careful out there.
The arm hooks right up to the hexapod's accessory port and uses empty slots on the existing servo driver board. A new version of the code, already released on our github page, allows the arm to be controlled by the gamepad and it can also be controlled from Scratch programs, making this both educational and fun.
We released a new version of the hexapod's Arduino code recently so you can control it using the Vorpal Gamepad (which is also 3d printed and uses no proprietary parts).
When this new software is loaded, you can turn the robot's control dial to RC mode (radio control) then turn it slightly counterclockwise until you hear one beep. That is a new mode: RC with Grip Arm. Now the gamepad's F2 (ninja mode number two) will control the grip arm. The DPAD will work like this in F2 mode:
The gamepad uses a special internal "smooth motion" mode so the arm goes up and down smoothly. The arm will hold its position if you switch to other modes such as walking or dancing.
To control the grip arm using Scratch blocks, just use the SERVO block. The claw is servo 12 and the arm is servo 13.
Sizing Things UpYou know we couldn't just stop here! We're currently working on a supersized version of the Grip Arm for our Max The Megapod project. Stay tuned for this big arm in early 2019.
And, we are also thinking of lots of new add-ons to keep our hexapod projects fresh and exciting, if you have an accessory or attachment you'd like to see, drop us a note at info@vorpalrobotics.com.
Useful Links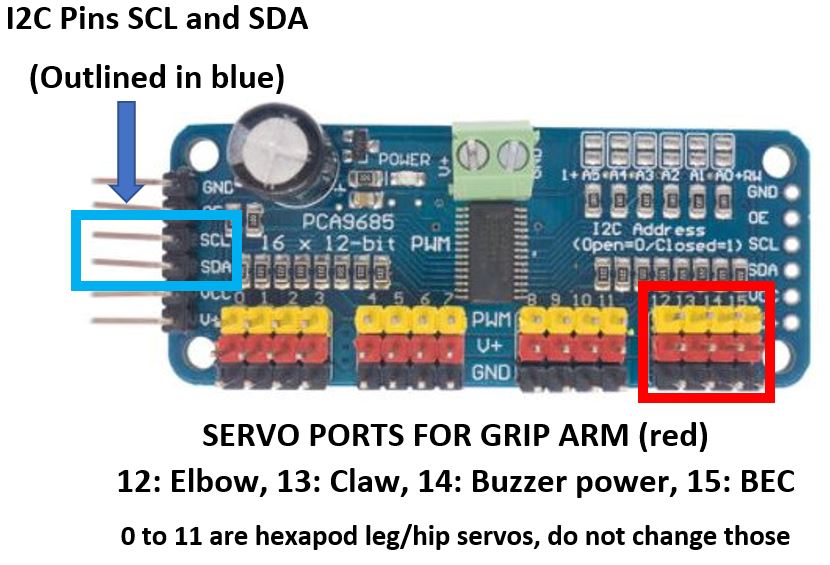




{kind=link}
Comments