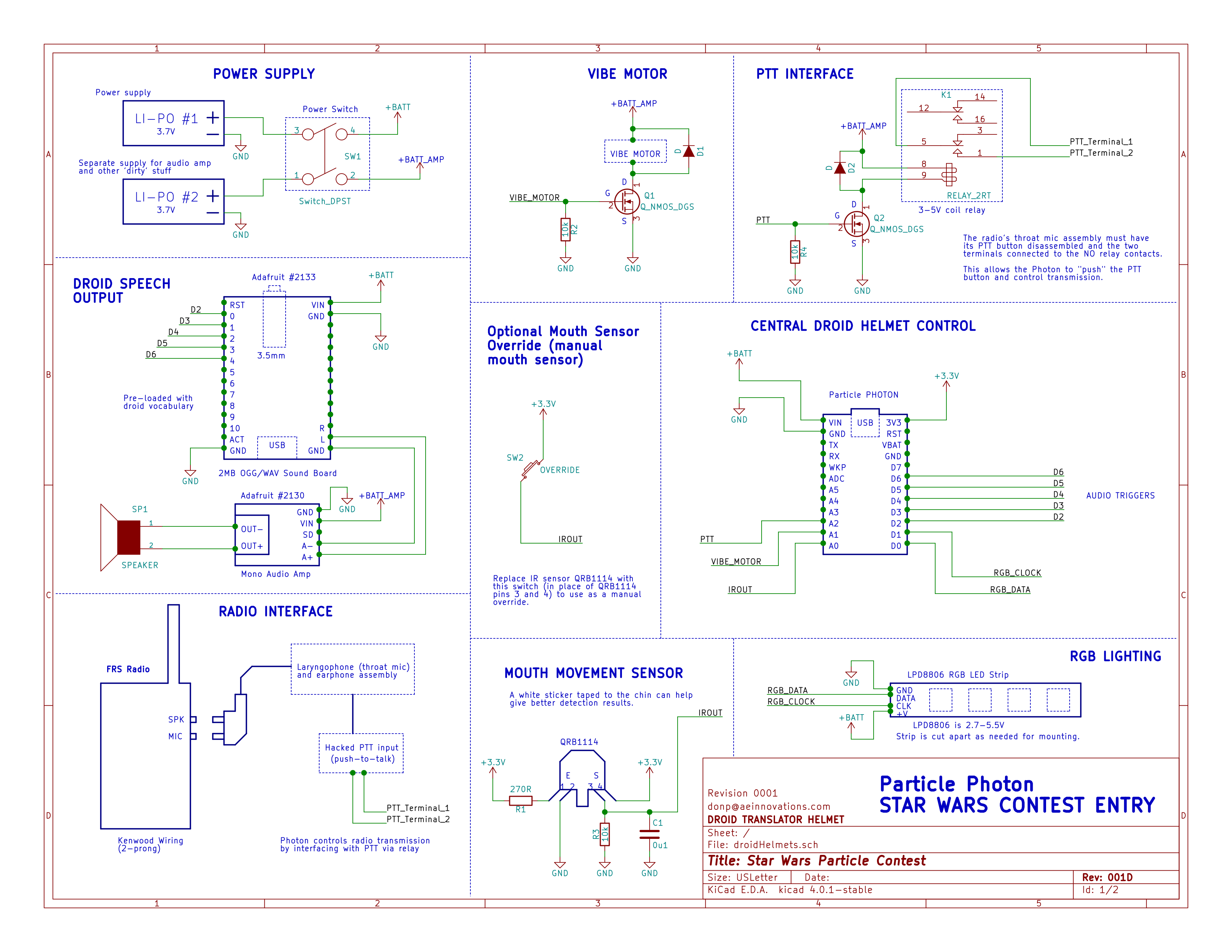
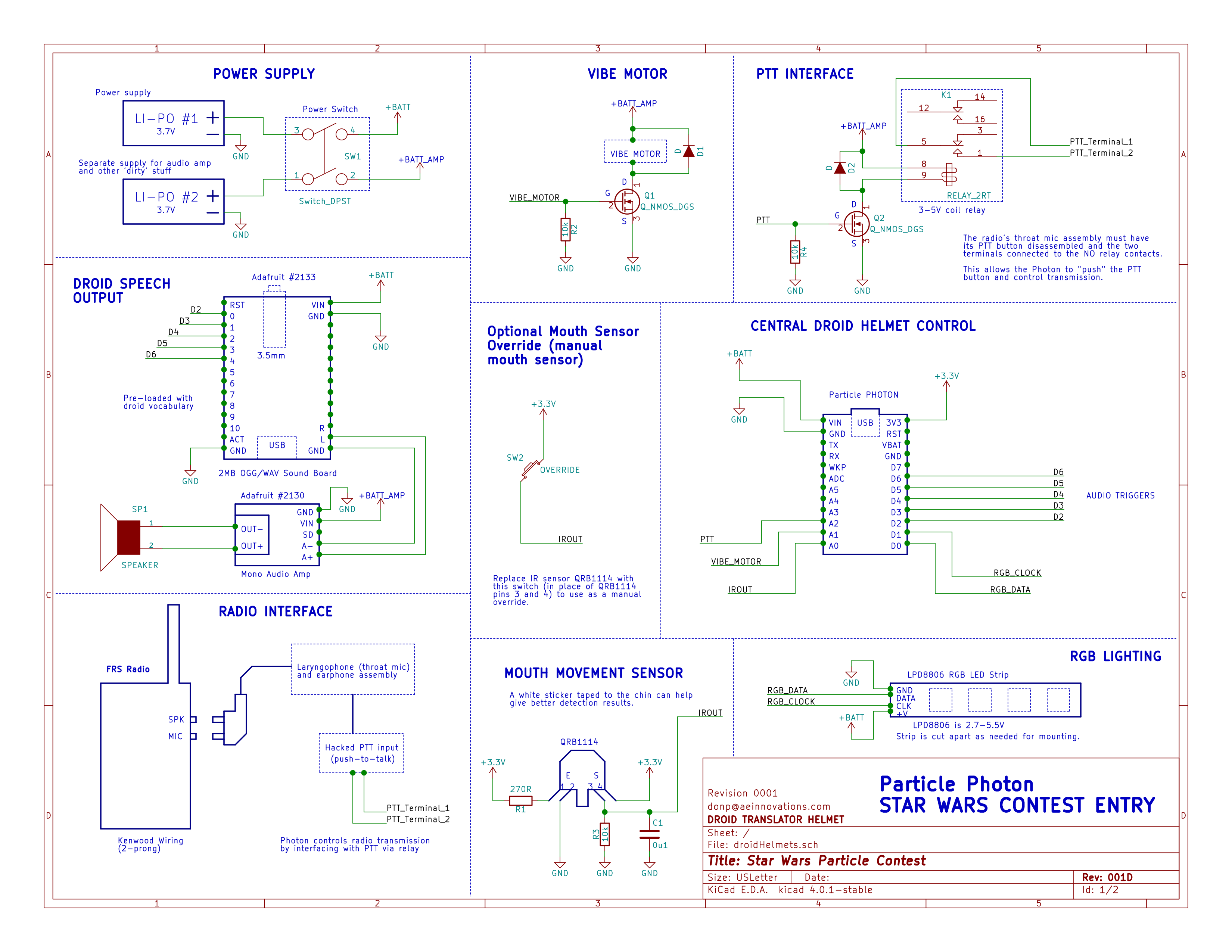
Used to switch two separate power supplies (batteries) with one switch.
×
1
ZVN210 N-channel MOSFET
Used to switch the coil of the relay from the Photon.
×
1
UVEX Sperian Protection S8500 Bionic Face Shield
Face shield is used as the frame for the whole helmet.
×
1
Software apps and online services
Particle UI
Story
Star Wars Droid Translator Helmets
They Work!
I made these Star Wars Droid Translator Helmets, and with them you can:
Look like a Droid!
Sound like a Droid when you talk!
Talk with and understand other Droids (wearing other helmets)!
Demonstration of two helmets talking to each other - we hear each other just fine, but you don't!
And here is a short video demonstrating the difference between wearing a helmet and not wearing one. The voice in the second part is an actual recording of what it sounds like through the other helmet.
Demonstration of speaking "Droid" but transmitting voice.
How It Works
First, an important detail. These helmets really do work, but like special effects - they are using some smoke and mirrors. The Droid "language" being emitted is meaningless gibberish. There is no actual translation happening. To get the effect, this is what happens behind the scenes:
The helmets sense when you are talking and emit "Droid" instead.
Your voice is picked up with a Laryngophone (throat mic) which is not only immune to ambient sounds (since it doesn't use sound waves) but it works even if you speak very quietly. When you speak quietly from behind the helmet, no one hears your actual voice.
The helmets transmit your actual voice on the sly to the other helmet(s).
The receiving helmet(s) play your actual voice directly into the ear, so no one else hears.
The RGB LEDs embedded into the helmets aren't just cosmetic - they represent specific activity and status reports.
The helmets use wi-fi to coordinate with each other (communicating status to each other, establishing transmission right-of-way, and so on.)
Interesting Lessons Learned
Many interesting or challenging things came up during the design process. Here are some of the more interesting ones:
No easy solution to making good Droid sounds. A dynamically-generated "Droid" language that sounds good is [still] a Holy Grail. Making "Droid" speech that sounded good was a major job that was far more difficult than expected. I learned I was not the first to discover this. "Droid" is so much more than beeps and boops - my original attempts to create the sounds programmatically were early failures and some research shows I was not alone. I learned that to get something that sounds good and emotional is no easy feat - I read a reference to an interview with Brett Burt (sound designer for Star Wars) in which he stated that making R2D2's voice was one of the hardest things he had done. In the end, the key was to make a sample set of short "Droid" speech bits that sounded good together and could be played seamlessly, and play them semi-randomly to represent speech. R2D2Translator.com was invaluable (see attributions). You can download my sample sets from the HARDWARE section. I talk a bit more about Droid sounds and using them here on this blog post.
Giving each Droid helmet a different "voice" was important but much harder than expected. It was important for two helmets to have two different "voices" of Droid because otherwise a conversation just sounds like one Droid talking to (and over) itself. It's not enough to give them different sample sets of the same basic sounds because even if the "words" never repeat, both helmets still sound the same. Pitch shifting, etc wasn't enough and never sounded right. In the end, I discovered that using the Censor -> Gibberish filter in Goldwave changed the samples enough that they sounded very different, but still sounded like a Droid. One batch process later, and I had a new and distinct voice for the second helmet.
Playing sounds is easier than it used to be. A problem with WAV files is that they take up a lot of memory. I wound up using hardware made for the purpose. An Adafruit WAV/OGG board fit the bill perfectly, and had many ready-to-use modes of operation right out of the box. WAV files are bigger than OGG but need no decoding, which allowed for seamless playback. It also was very easy to load and re-load sounds for testing as well. Still, the software to drive it all still has some complexity to it - you can't entirely leave it all to the sound board. You still need to choose which sample set to use, then later when the wearer has stopped talking you need to halt the playback in a way that makes sense (well, sounds good anyway) - no glitches or sudden cutoffs.
A throat microphone (laryngophone) really does work best for this project because not only can it pick up quiet speech (talk too loud and people will hear you over the Droid speaker), but it's immune to ambient sounds (such as a speaker bleating out "Droid" language a few inches away...) It's possible to make your own (I tried several versions) but you can't beat just buying one off the shelf (common on Amazon, eBay, etc) for not only ease of use but also for the fact that they come built into an adjustable frame complete with connectors. Sometimes it's not worth rolling your own.
Sometimes you need to go with what works so you can move forward. I originally intended to use this project as a basis for transmitting voice, but some of the functions needed weren't supported by current firmware. Even fiddling with older firmware, I spent a lot of time on it but was unable to get it working and needed to make a decision. With the deadline to consider, I decided to offload voice transmission onto off-the-shelf FRS radios. I interfaced the Photon to it (non-destructively) so the Photon still controls the radio and transmissions.
It was very important for everything to fit in/on the helmet. No external boxes, umbilical cables, etc. It would have been fast and easy to just stick things to the helmets wherever they might have fit, but the result would have been poor. I spent a lot of time planning where pieces would go and how the cables would be placed. If I hadn't, I have little doubt that I would have had to resort to an externally-mounted box. There would have been too many components and not enough helmet to go around. The helmet would have been poorly balanced and uncomfortable to wear. Debugging would have been more difficult. I go into a bit more detail about this in this blog post.
It was important to still be able to flip the face mask up/down without anything getting in the way. I was very glad I took the time to make sure this could be done. It was invaluable later for comfort.
The RGB LEDs are not random, they represent specific status. They look good but were also super handy during debugging. Being able to visually confirm status of more than just the one helmet you're actively debugging is very useful.
The two helmets synchronizing their operation and status over UDP (via wi-fi) was important. The helmets have all they need to function, but a "traffic cop" to keep things orderly and prevent more than one thing happening at a time was a critical part of polish. This helps ensure only one helmet talks and transmits at a time. It also lets the helmets coordinate RGB patterns which are not only pleasing to watch, but useful for debugging.
On the topic of using UDP over wi-fi - the Particle Photon made this ridiculously simple. I was done in no time, Particle made it shockingly easy.
Color printouts of Droid faces behind face shields worked out better than expected. I knew from the start I was going to need to spend my time on the electronics, not on making a "mask". So I chose this method as a quick way to get a decent result that left me the space and material I needed. Turns out it actually ended up looking very good!
Things that DIDN'T work as expected (or at all)
There were false starts, dead ends, and direction shifts during the design process. Here are some of the significant ones:
These bone conductor transducers from Adafruit were an early idea to transmit received voice privately from other helmets directly via bone conduction. Seemed natural since I already had a strap on the skull due to the helmet - use that tension to hold it firm to the skull. However in practice they turned out to be difficult to use. The transducer isn't quite in a ready-to-use form. The part that needs to touch the skull is small and very close to the part that needs to be isolated. It was too fiddly and didn't work particularly well for me in testing, so I went with what is basically an ear bud.
I originally intended to use hearing protection muffs over the helmet wearer's ears. I would pipe in ambient sounds until another Droid was speaking - at which point I would mute ambient sound and play only the other Droid helmet wearer's actual transmitted voice. The idea was that you wouldn't be distracted by the Droid speaking "Droid" while you were trying to listen to the person's actual voice. As it turned out, it's not a big deal. A proof-of-concept with parts taped into cardboard boxes proved this; we tested things and it wasn't a noticeable problem. This was good because the hearing protection muffs don't fit well under the helmet anyway. They actually worked and I had one (of two) made, but I was glad to ditch them and the whole idea for what is basically an earbud.
The mouth sensor was a tough nut to crack. I wanted something that wouldn't touch you and would be part of the helmet, and would still be able to act as a "talking" sensor reliably. It works, but it's very fiddly. It needs to be placed close (but not too close!) to the chin, so I mounted it on a flexible stalk. It works if you find the sweet spot. However, it was far too clunky to use during debugging, when you had many much better things to do than fiddle with a sensor. I ended up making an optional manual "push-to-talk" button that acted as a manual override - it was a wise decision.
The helmets ended up being sort of awkward to store! They are strangely shaped and all rounded surfaces and curves. Putting them face-down into a too-small box was best for working on them. Perching them on thin boxes as "stands" was best for holding them up. It doesn't sound like much, but the awkwardness of working on or storing large-ish items with no flat surfaces is easy to underestimate.
Photo Gallery
1 / 10 • Proof-of-concepts in cardboard boxes.
"First Person View" Video of Helmet Use
Here is a video intended to show what it's like to look through and listen through the helmet. Enjoy with the caveat that recording from a camera pushed into a helmet and recording audio from an earbud taped up to the camera's mic gives poor quality. If you want to hear a better representation of what things sound like, the video near the top of the page (and on youtube here) is a recording from the helmet's LINE OUT and represents actual sound quality much better. With that in mind, enjoy.
First Person View Video Experience
Future Improvement
There are a number of things that could be improved. This is, after all, only a version 1 prototype sort of device.
Ditching the radios and transmitting voice directly over wi-fi would be impressive. I originally wanted to use this project as a basis for exactly that, but was unable to get it to work. It is important that all voice transmission is real-time.
The mouth movement sensor should be more robust and easier to use. It works as-is, but it must be positioned in a "sweet spot". It's too fiddly.
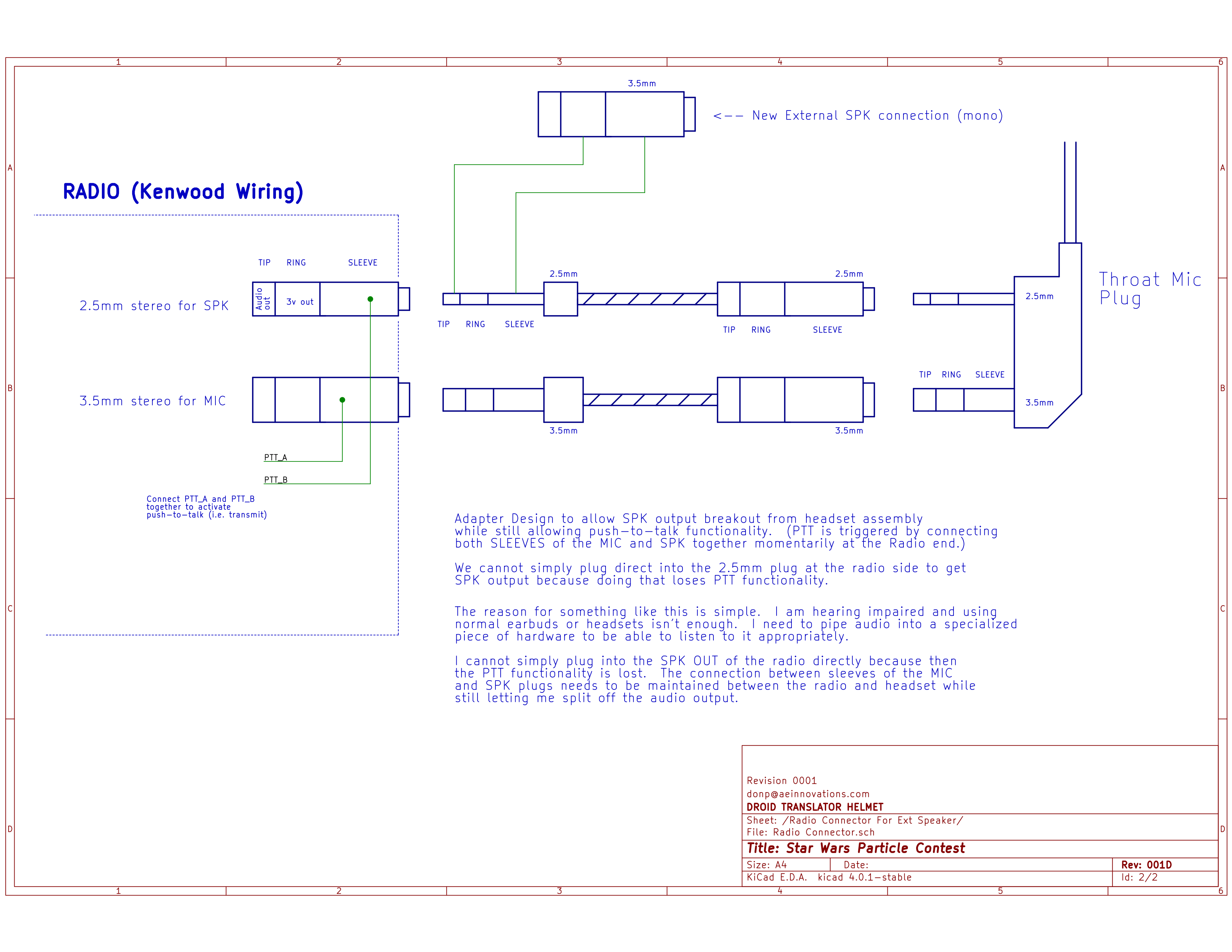
If an optional LINE OUT is needed for audio from other helmets, you need to make a breakout adapter as shown. This applies to "Kenwood" style 2-prong wiring.
Droid "face" #1
Print out in color (will fit on 11x17 small poster size) and cut out to fit inside the face shield.
Droid "face" #2
Print out in color (will fit on 11x17 small poster size) and cut out to fit inside the face shield.
Droid voice sampleset #1
Set of WAV files for uploading to Adafruit WAV player (#2133). Choose a trigger input from 0-4 on the WAV player, and while LOW the player will play some semirandom droid language. These samplesets have been carefully made so that they will always sound good no matter where you start or stop.
Droid voice sampleset #2
Set of WAV files for uploading to Adafruit WAV player (#2133). Choose a trigger input from 0-4 on the WAV player, and while LOW the player will play some semirandom droid language. These samplesets have been carefully made so that they will always sound good no matter where you start or stop.
Code from Particle's online UI. Uses the FastLED library.
#include"FastLED/FastLED.h" // Use latest library version - might have to select 3.14 (as of Dec 2016) manually FASTLED_USING_NAMESPACE;/* Droid Translation Helmet code Project Documentation: https://www.hackster.io/vastemptinessinside/star-wars-droid-translation-helmets-359bea donp@aeinnovations.com Feb 2016*/#define IRsensorPin A0 // Mouth sensor#define PTT_PIN A2 // Interface to radio's TRANSMIT - via relay#define DATA_PIN 0 // For LED strip#define CLOCK_PIN 1#define SOUND_0_PIN D6 // Interface to sound board#define SOUND_1_PIN D5#define SOUND_2_PIN D4#define SOUND_3_PIN D3#define SOUND_4_PIN D2#define NUM_LEDS 4#define BRIGHTNESS 255#define MOUTH_SENSOR_SAMPLE_RATE 250#define IR_BUFFERSIZE 3#define LONGTERM_BUFFERSIZE 12#define IR_SENSOR_STARTUP_DEADTIME 3000 // this many ms before we actually look at the data (to allow it to populate)#define IR_SENSOR_DECAYTIME 100 // Don't assume mouth is done unless at least this much time has passed#define DUMP_IR_SENSOR_DEBUG 0#define PTT_DECAY_TIME 1000 // minimum time to keep PTT on, PTT is useful to hold ON separate from mouth sensor results#define UDP_PORT_FOR_RIGHT_OF_WAY 8899#define RIGHT_OF_WAY_DECAY_TIME 500 // How many ms that right-of-way assertion needs to be absent before we assume it's overunsignedlongintmouthSensorDeadline;// low-precision timer for when to poll the mouth movement sensorunsignedlongintmouthSensorLeaveAloneUntil;unsignedlongintmouthSensorDecayed;unsignedlongintPTToffDeadline;intIRreadings[IR_BUFFERSIZE];intIRlongterm[LONGTERM_BUFFERSIZE];intIRindex;intIRprevious;intIRltindex;boolmouthMoving;boolamSpeaking;boolPTTonState;boolmouthOverride;// Whether we have a hardware override installed (auto detected)boolrightOfWayAsserted;// whether someone else is transmitting and has asserted right-of-way (and so we forbid transmission, etc of our own)unsignedlongintrightOfWayOver;// LED String relatedCRGBleds[NUM_LEDS];// UDP related - we use it to transmit and coordinate "right of way" when talking.// Right of way allows reception of another helmet's transmission to overrider and suppress any talking / emitting of our own // as well as play light patterns unique to the act of listening.UDPrightOfWayUDP;IPAddressbroadcastAddress(255,255,255,255);unsignedintUDPport=UDP_PORT_FOR_RIGHT_OF_WAY;voidsetup(){// UDP functionality (transmission and reception of right-of-way signal via wifi) setuprightOfWayUDP.begin(UDPport);// LedsFastLED.addLeds<LPD8806,DATA_PIN,CLOCK_PIN,GRB>(leds,NUM_LEDS);FastLED.setBrightness(BRIGHTNESS);for(inti;i<NUM_LEDS;i++){leds[i]=CRGB::Black;}FastLED.show();pinMode(IRsensorPin,INPUT);pinMode(PTT_PIN,OUTPUT);pinMode(SOUND_0_PIN,OUTPUT);pinMode(SOUND_1_PIN,OUTPUT);pinMode(SOUND_2_PIN,OUTPUT);pinMode(SOUND_3_PIN,OUTPUT);pinMode(SOUND_4_PIN,OUTPUT);digitalWrite(SOUND_0_PIN,HIGH);digitalWrite(SOUND_1_PIN,HIGH);digitalWrite(SOUND_2_PIN,HIGH);digitalWrite(SOUND_3_PIN,HIGH);digitalWrite(SOUND_4_PIN,HIGH);digitalWrite(PTT_PIN,LOW);Serial.begin(57600);Serial.println("Droid Translation Helmet Firmware Version 1.0");Serial.println("papp.donald@gmail.com - Feb 2016");Serial.println("(? for debug commands)");Serial.println(" ");Serial.println(WiFi.localIP());Serial.println("PLAYER 1 READY");for(inti;i<NUM_LEDS;i++){leds[i]=CRGB::Green;FastLED.show();delay(100);}for(inti;i<NUM_LEDS;i++){leds[i]=CRGB::Black;FastLED.show();delay(100);}checkMouthSensorOverridePresent();// Set up an initial time for checking the IR mouth movement sensor (this kicks off doing it every roughly 50ms unless changed)mouthSensorDeadline=millis()+MOUTH_SENSOR_SAMPLE_RATE;mouthSensorLeaveAloneUntil=millis()+IR_SENSOR_STARTUP_DEADTIME;IRindex=0;IRprevious=IR_BUFFERSIZE-1;IRltindex=0;mouthMoving=false;PTToffDeadline=0;// A time to turn the PTT off at after it turns on. 0 means inactive/disabled.}voidloop(){if(millis()>mouthSensorDeadline){if(mouthOverride==true){handleMouthButton();}else{handleMouthSensor();}}if((mouthMoving==true)&&(rightOfWayAsserted==false)){speakDroid(true);}else{speakDroid(false);}if((mouthMoving==true)&&(rightOfWayAsserted==false)){PTTon();// Turn on if not already onPTToffDeadline=millis()+PTT_DECAY_TIME;// Top up this value - keep tacking on the PTT_DECAY_TIME as long as we're talkingsendROY();// send a right-of-way assertion packet because we are transmittingleds[1]=CRGB::Green;FastLED.show();}if((millis()>PTToffDeadline)&&(PTToffDeadline!=0)){PTToff();leds[1]=CRGB::Black;FastLED.show();}if(Serial.available()>0){intinByte=Serial.read();doConsoleCommands(inByte);}if(rightOfWayUDP.parsePacket()>0){// If any UDP data exists, someone is asserting Right of Way (transmission-wise) so act accordingly. Actual data is don't care.rightOfWayAsserted=true;rightOfWayOver=millis()+RIGHT_OF_WAY_DECAY_TIME;leds[0]=CRGB::Red;leds[1]=CRGB::Red;leds[2]=CRGB::Red;leds[3]=CRGB::Red;FastLED.show();rightOfWayUDP.flush();// drop the data on the floor - it's irrelevant only the transmission existence matters.Serial.println("Right of Way asserted by ~someone~");leds[0]=CRGB::Black;leds[1]=CRGB::Black;leds[2]=CRGB::Black;leds[3]=CRGB::Black;FastLED.show();}if((rightOfWayAsserted==true)&&(millis()>rightOfWayOver)){rightOfWayAsserted=false;Serial.println("Right of Way expired");}delay(50);// Makes things a little more readableParticle.process();}/* FUNCTIONS */// Handle hardware override for mouth sensorvoidhandleMouthButton(void){intreading=analogRead(IRsensorPin);// Handle manual override - 0-2 and 4093-4094 when using manual button overrideif(reading>4090){//Serial.println("Override button DOWN");mouthMoving=true;//Serial.println("mouth ON");leds[0]=CRGB::Red;FastLED.show();}else{//Serial.println("Override button UP");mouthMoving=false;//Serial.println("mouth OFF");leds[0]=CRGB::Black;FastLED.show();}mouthSensorDeadline=millis()+MOUTH_SENSOR_SAMPLE_RATE;// Set up for next time aroundreturn;}// Handle Mouth Sensor takes care of checking if it's time to read the value of the mouth sensor (an IR reflective sensor), managing a couple ring buffers of// readings and calculating some averages, and checking whether the value changes should be considered "user is talking" or "user has stopped talking".// And the housecleaning around that. This function is more like a big macro, almost everything it touches is a global variable.//// Most useful of which is boolean variable "mouthMoving" which reflects whether the user is talking.//voidhandleMouthSensor(void){intreading=analogRead(IRsensorPin);// Get current IR reading //Serial.println(reading);IRreadings[IRindex]=reading;// Write current value to the bufferintdiff=IRreadings[IRindex]-IRreadings[IRprevious];// Get absolute difference between this reading and the last one (i.e. the amount, ignore +/-)diff=abs(diff);intsignedDiff=IRreadings[IRindex]-IRreadings[IRprevious];// Same but maintains the signintshortTermAvg=0;// Average of the short-term ring bufferfor(inti=0;i<IR_BUFFERSIZE;i++){shortTermAvg+=IRreadings[i];}shortTermAvg=(shortTermAvg/IR_BUFFERSIZE);IRlongterm[IRltindex]=diff;// Long term buffer stores magnitude changes, so store the last diff value in it.intIRlongtermAvg=0;// Calculate the average diff over the entire long termfor(inti=0;i<LONGTERM_BUFFERSIZE;i++){IRlongtermAvg+=IRlongterm[i];}IRlongtermAvg=(IRlongtermAvg/LONGTERM_BUFFERSIZE);if(millis()>mouthSensorLeaveAloneUntil){// Decide if mouth has started moving - sensor data in IRreadings[] and IRlongterm[] are stable// What we have to work with is:// diff: the absolute change between last reading and this reading (e.g. "50" change from last time whether it was +50 or -50)// signedDiff: same but preserves the sign (so we know whether it was up or down)// IRlongtermAvg: average of diffs over the past while (a primitive sort of low-pass filter)// shortTermAvg: average of (default three) last readings, averages out noisy readings//// How to decide if the mouth is moving:// - Since the IR sensor sometimes has spikes of noise readings (like a diff of 13 all of a sudden out of 0,1,2s) we need to ignore these// - We also need to ignore slow and steady changes in the average value (ambient IR changes, slow sensor movement, etc)// - When we detect a lot of frequent changes to the sensor value, the mouth is moving.// * IRlongtermAvg = used as a threshold// * diff = most recent amount of change// * if diff is significantly higher than IRlongtermAvg a number of times in a row, then triggerif(DUMP_IR_SENSOR_DEBUG==1){Serial.print(diff);Serial.print(": ");Serial.print(IRlongtermAvg);Serial.print(": ");Serial.println(abs(IRlongtermAvg-diff));}// ^^ Actually if all three go double digit that's not a bad threshold, all three single digit is definitely non-movement and all three double+// is definitely movement. 2/3 and 1/3 = hysterysis?if((((diff>50)&&(IRlongtermAvg>50)&&(abs(IRlongtermAvg-diff)>50))&&(mouthMoving==false))){mouthMoving=true;Serial.println("mouth ON");leds[0]=CRGB::Red;FastLED.show();}//if(((diff<50) && (IRlongtermAvg<50) && (abs(IRlongtermAvg-diff)<50)) && (mouthMoving==true)) {//else if(((diff<25) && (mouthMoving==true)) || (override==false)) {elseif(((diff<25)&&(mouthMoving==true))){mouthMoving=false;Serial.println("OFF");leds[0]=CRGB::Black;FastLED.show();}}// Manage the ring buffer indexes - inc then wrap if neededIRprevious=IRindex;IRindex++;IRltindex++;if(IRindex==IR_BUFFERSIZE){IRindex=0;IRprevious=(IR_BUFFERSIZE-1);}if(IRltindex==LONGTERM_BUFFERSIZE){IRltindex=0;}mouthSensorDeadline=millis()+MOUTH_SENSOR_SAMPLE_RATE;// Set up for next time around}// Speak Droid (true or false ie on or off)// Handles choosing a randome sample set to begin playing, then stops that same sample set on// the next stop command. In other words takes care of tracking which sample set is playing // or needs to be stopped (only ever one at a time).voidspeakDroid(boolstate){staticintsampleChoice;// Choose a sample set (0-4) if we're about to playif(amSpeaking==false&&state==false){sampleChoice=random(2,7);// Returns 2-6; seed is handled by the cloud upon connect. Digital pins 2-6 play sample sets 0-4.}if(state==true&&amSpeaking==false){digitalWrite(sampleChoice,LOW);amSpeaking=true;Serial.print("|> PLAY sample set ");Serial.println(sampleChoice-2);}if(state==false&&amSpeaking==true){digitalWrite(sampleChoice,HIGH);amSpeaking=false;Serial.print("[] STOP sample set ");Serial.println(sampleChoice-2);}}// PTT on and off control// Energizes the relay (or turns it off)voidPTTon(void){if(PTTonState==true){return;// Already on}Serial.println("PTT on");digitalWrite(PTT_PIN,HIGH);PTTonState=true;PTToffDeadline=millis()+PTT_DECAY_TIME;// PTT will always be ON for minimum of now + PTT_DELAY_TIMEreturn;}voidPTToff(void){if(PTTonState==false){return;// Already off}Serial.println("PTT off");digitalWrite(PTT_PIN,LOW);PTTonState=false;PTToffDeadline=0;return;}voidPTTonDebug(void){Serial.println("PTT on");digitalWrite(PTT_PIN,HIGH);return;}voidPTToffDebug(void){Serial.println("PTT off");digitalWrite(PTT_PIN,LOW);return;}voiddoConsoleCommands(intinByte){if(inByte=='?'){Serial.println(">Sound Debug: 0-4 to play, shift 0-4 to stop");Serial.println(">Lamp Test: L");Serial.println(">PTT Relay on: p");Serial.println(">PTT Relay off: P");Serial.println(">Send single UDP right-of-way packet: u");}elseif(inByte=='0'){speakSample(0);}elseif(inByte=='1'){speakSample(1);}elseif(inByte=='2'){speakSample(2);}elseif(inByte=='3'){speakSample(3);}elseif(inByte=='4'){speakSample(4);}elseif(inByte==')'){speakStopSample(0);}elseif(inByte=='!'){speakStopSample(1);}elseif(inByte=='@'){speakStopSample(2);}elseif(inByte=='#'){speakStopSample(3);}elseif(inByte=='$'){speakStopSample(4);}elseif(inByte=='p'){PTTonDebug();}elseif(inByte=='P'){PTToffDebug();}elseif(inByte=='u'){// send 1 UDP packetsendROY();Serial.println("Sent UDP packet broadcast (asserting transmission right-of-way)");}elseif(inByte=='L'){Serial.println("RGB Test begin");for(inti;i<NUM_LEDS;i++){leds[i]=CRGB::Red;FastLED.show();delay(100);}for(inti;i<NUM_LEDS;i++){leds[i]=CRGB::Green;FastLED.show();delay(100);}for(inti;i<NUM_LEDS;i++){leds[i]=CRGB::Blue;FastLED.show();delay(100);}for(inti;i<NUM_LEDS;i++){leds[i]=CRGB::Black;FastLED.show();delay(100);}Serial.println("RGB Test end");}}// For testingvoidspeakSample(intsampleSet){sampleSet=sampleSet+2;// D2-D6 is sampleSet 0-4digitalWrite(sampleSet,LOW);Serial.print("|> PLAY sample set ");Serial.println(sampleSet-2);}voidspeakStopSample(intsampleSet){sampleSet=sampleSet+2;// D2-D6 is sampleSet 0-4digitalWrite(sampleSet,HIGH);Serial.print("[] STOP sample set ");Serial.println(sampleSet-2);}// If three checks are all <10 on the mouth sensor, then assume the manual override is attachedvoidcheckMouthSensorOverridePresent(void){intreading=analogRead(IRsensorPin);delay(100);reading+=analogRead(IRsensorPin);delay(100);reading+=analogRead(IRsensorPin);delay(100);if(reading<30){mouthOverride=true;Serial.println("Mouth sensor override button present");}}// Send right-of-way UDP packetvoidsendROY(void){leds[2]=CRGB::Blue;FastLED.show();charc='X';rightOfWayUDP.beginPacket(broadcastAddress,UDPport);rightOfWayUDP.write(c);rightOfWayUDP.endPacket();delay(100);leds[2]=CRGB::Black;FastLED.show();}


.png?auto=compress%2Cformat&w=900&h=675&fit=min)







{kind=link}
{kind=link}
Comments