This project was completed as a course project for ECE372 (Dynamic Programming and Optimal Control) in Fall 2022 at RISC Lab, KAUST, Saudi Arabia. This project extends my previous winning project, Quad96, to the real quadcopter.
Abstract
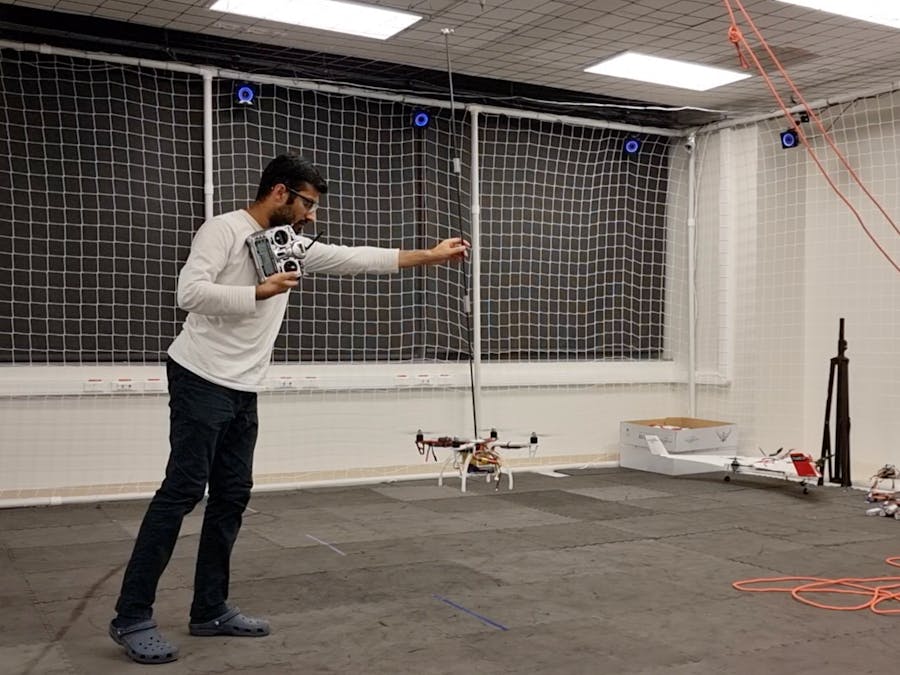
In this project, a deep reinforcement learning agent (DQN) was trained in a 2D simulation environment to balance an inverted pendulum on a quadcopter. During inference, the trained DQN agent was deployed on the Odroid onboard computer and was tested in a 3D real-world system (as the dynamics of the quad-pole system along the x and y-axis are decoupled around the equilibrium point).











Comments