

Hardware components | ||||||
 |
| × | 2 | |||
 |
| × | 2 | |||
 |
| × | 2 | |||
 |
| × | 2 | |||
 |
| × | 2 | |||
We already have many different services that are used to call for help when a road accident happens. We also have some technologies that try to prevent accidents by emergency braking when an obstacle is in front of us. But there still aren't many services that would make traffic more predictable by sending alert to drivers that are coming towards a location where something happened. Because of that, there are accidents where many cars rear-end each other. TruckSense is trying to prevent just that. Because trucks have the longest braking distance they are the most endangered in these types of situations and the main goal of TruckSense is to help them by creating more predictable and smooth traffic for them. If they would be notified in a timely manner they would have a lot of time to reduce the speed some accidents could be prevented and their job would be less stressful.
Our goal is to provide a predictable and safe trucking experience.
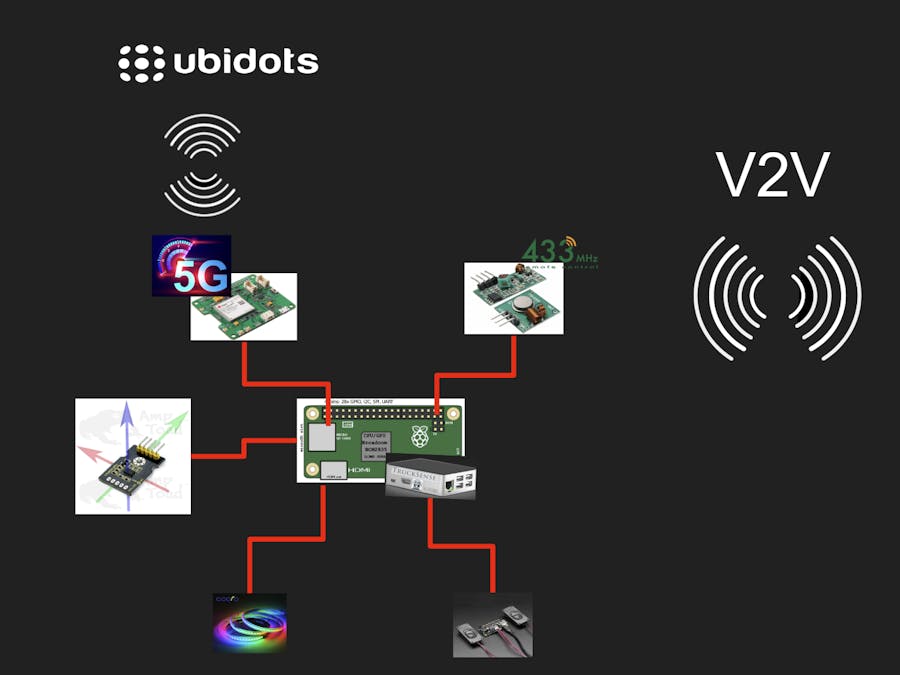
Aim of TruckSense is to send alerts to drivers that are coming close to the location where an accident occurred. TruckSense detects that something happened with the help of some in-built sensors like an accelerometer. For example, if the driver is braking hard our accelerometer would notice a huge increase in readings, which could mean that something happened and the driver had to brake hard - or he even crashed. Therefore we need to have reliable V2V communication with a relatively long-range (at least 1km) in order to reach vehicles that are coming closer and giving them enough time to react. We also need a very low latency system on the transmitting side because we want to send a Mayday message during an accident (airbags deploy in approx. 20 ms, after that our transmitter is useless). We were researching different technologies for V2V communication that have low latency, but many of them (G5 for example) work on 5.9GHz which really limits our range (up to 100m in worst case scenario). That is why we have decided to use a simple transmitter and receiver for communication on 433MHz with our own proprietary efficiency-focused protocol.
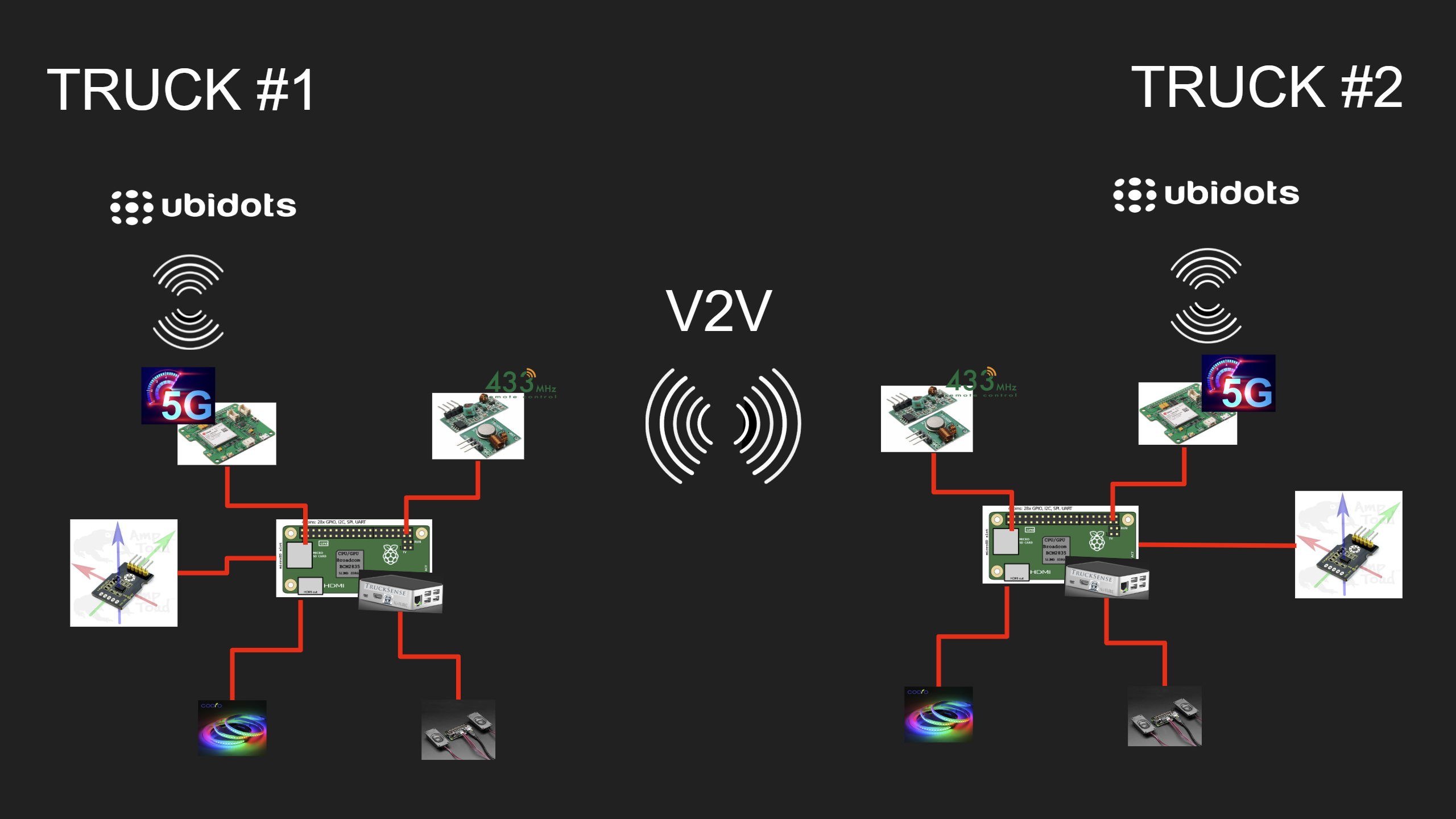
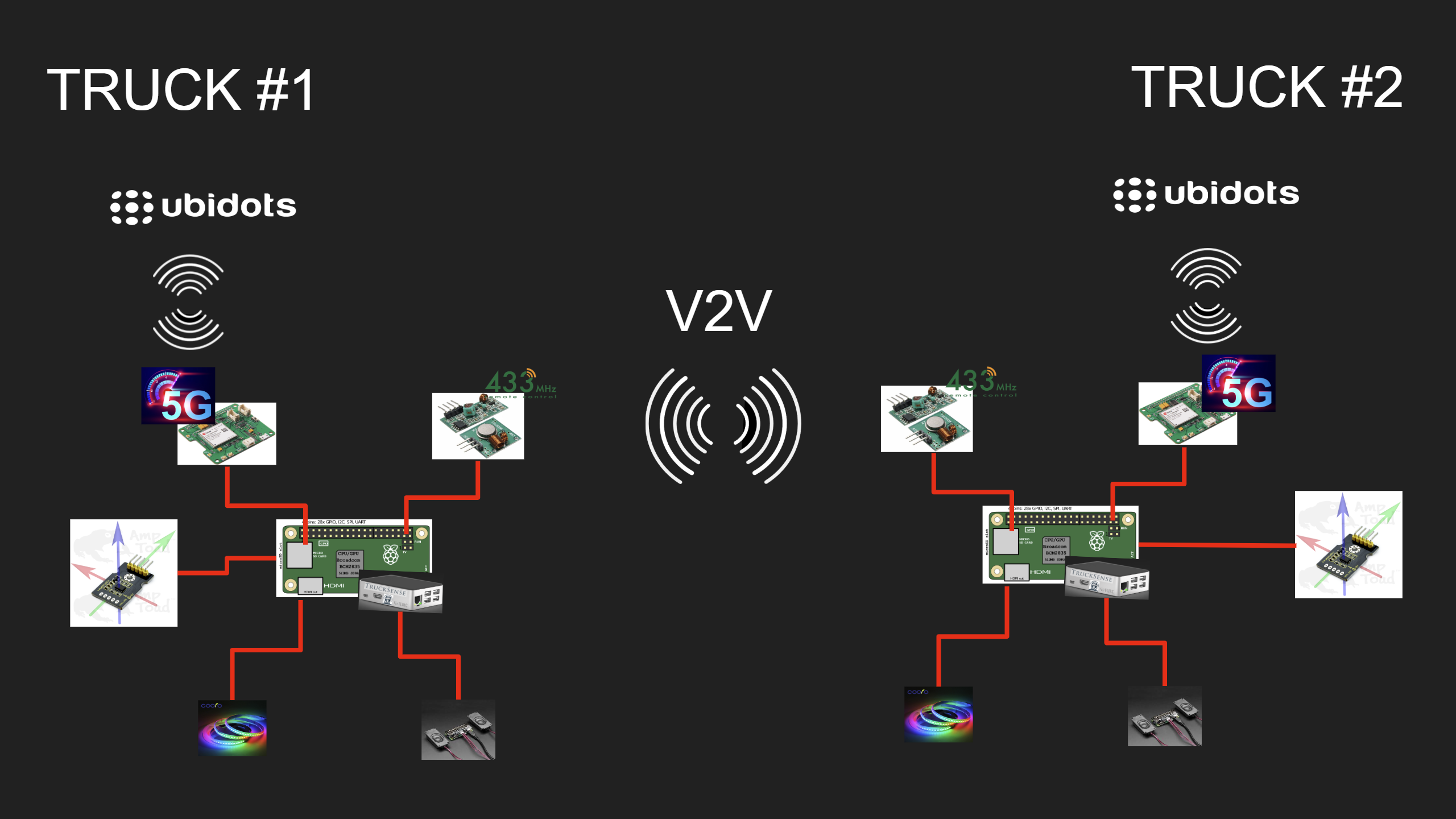
How it worksAs mentioned, when an event occurs, the vehicle that is involved sends a low-latency message over 433Mhz to the nearby vehicles (V2V communication). This message includes the following data:1. GPS location2. Type of eventAfter this message is received by a nearby vehicle, this vehicle computes its distance from the accident. If an accident is in a radius of 1km, we start with visual and audio HMI warnings to the driver.
The alerted vehicle then also contacts a Ubidots cloud via LTE modem where it uploads the Mayday message. Ubidots server is used for various stats and an emergency action system where the emergency services (911) are being notified is also in progress.
User interface - HMI
The user interface in the truck's driver cabin consists of the following elements:
- LED RGB strip, mounted on the roof of the cabin
- Speaker, integrated into the main unit
Currently, there are 3 types of warning combinations. The choice of the warning type currently depends on the warning severity, which is measured as a distance to the event.
All the possible warnings are displayed below:
1. The system works and there are no new events
2. The system received analert from 700-1000 m ahead
3. The system received analert from 300-700 m ahead
4. Dangerous situation less than 300 m ahead
Red light starts blinking + audio alert: "Caution:Danger in the immediate area."
All the gathered data is very useful for analyzing which road sections are the most dangerous. That is why all messages are also sent to the backend server - Ubidots cloud. Because the device that sents the original message could be destroyed in an accident we decided it would be better if the message would be forwarded to the server from the receiving side. All the devices that receive a message also send the received event information on the backend server.
Data stored on the server can be used to decide if something needs to be changed on the most dangerous road sections and can notify emergency services if a massive chain collision occurs.










{kind=link}
Comments