





An inertial navigation system (INS) or inertial measurement unit (IMU) is a form of dead reckoning navigation system that uses a combination of accelerometer and gyroscope sensors working in concert to detect displacement relative to a starting point. The system measures both linear accelerations given by its accelerometer and angular velocity changes from its gyroscope. World referenced-frame acceleration data can then be integrated to calculate the velocity and position of the sensors over time, but because the INS can only measure motion relative to a starting location, the initial position must be supplied by some outside system (in the case of this project, using a Global Positioning System (GPS) receiver). Additionally, to compensate for the drift in the inertial navigation system caused by various defects in inertial sensors, the outside references (GPS and barometer) must be polled occasionally to correct for the position error. Using a Raspberry Pi microcomputer as the base system and an MPU 9150 IMU, an inertial navigation system can be developed. Kalman Filtering with GPS and barometer data will be used to complete a “strap down solution” - a closed-loop system which can self-correct for error. Moreover incorporating DNN into the flight controller can further enhance the navigation system. Through this design the aircraft will be able to navigate through treacherous forestry and places where GPS tends to fail or is unavailable.
KEYWORDS
Inertial sensors, GPS, Deep Neural Networks, Kalman Filter.
INTERNATIONAL STATUSA global navigation satellite system (GNSS), contrary to an inertial navigation system (INS), is dependent on a lot of factors to work, including space vehicles, ground stations, antennas, or solar activity. GNSS signals can be obstructed, altered or jammed. The most known GNSS, the American Navstar GPS, is a military system funded and managed by US Air Force, not by civilians. The usual solution for navigation is to use INS frequently updated by GNSS, as long as GNSS signal is available, accurate and reliable. GNSS receivers are fitted with a system able to determine when this is not the case.
While INS has several disadvantages, it has also unique capabilities:
INS position can be updated 1, 000 times per second while GNSS is updated at a slow rate (e.g. once or 10 times per second), due to the difficulty to extract the weak GNSS radio signal and to the heavy computation involved.
INS provides position elements like GNSS, but also orientation (attitude), rotation rate and related accelerations. In the short term these data are very accurate.
INS provides True North direction.
INS interpolates the position, providing higher rate of updates to the autopilot, so it can follow defined route more precisely.
Since each system has different kind of error, cross-referencing them provides higher accuracy then either system alone.
INS provides fall-back in case GNSS (which may fail or lose precision for external reasons) fails. This is especially important when flying Required Navigation Performance (RNP) procedures. These are in places with limited terrain clearance like narrow valleys. If GNSS fails, the INS allows enough time to safely climb out of the terrain (and divert) before it accumulates too much error.
NATIONAL STATUSAs part of efforts to upgrade air traffic management in the country, the Airports Authority of India has launched the process of implementing a critical safety system that uses the global positioning system (GPS) for safe navigation of flights. This is part of the implementation of the GPS Aided Geo Augmented Navigation (GAGAN) system that would improve air navigation, not only over the Indian airspace but also the airspace over the Indian Ocean region from Southeast Asia to the African shores. GAGAN would provide augmented information for satellite navigation to aircraft flying over Indian airspace and routes over high seas with high level of accuracy, integrity and continuity during the entire flight operations
IMPORTANCE OF THE PROPOSED PROJECT IN THE CONTEXT OF CURRENT STATUS
Over the last decade, aircraft have been increasingly using Global Navigation Satellite System (GNSS) technology. This tech is used instead of traditional radio navigation aids, and air-to-ground-based and inertial navigation systems, as more operators take advantage of advanced Performance Based Navigation (PBN) procedures and satellite-based navigation technologies being deployed by Air Navigation Service Providers (ANSPs) around the world. But what happens when the signal used by GPS satellites gets jammed or fails
Between 2013 and mid-2016, there were nearly 80 incidents of aircraft GPS signal interference or malfunctions, according to those filed on NASA’s Aviation Safety Reporting System (ASRS). Pilots flying aircraft ranging from Cessna 172s to Airbus A300s have been reporting these incidents — and the incidents are not limited to the U.S. Other more high-profile incidents around the globe also highlight the problem.
The vast majority of incidents involve GPS-based navigation systems either experiencing a total loss of signal or — more alarmingly — misreporting the aircraft’s position. In around 50 cases, no immediate explanation is given for the malfunction,
SOURCE: Guy Buesnel, PNT security technologist at Spirient Communications, a communications networks provider based in the U.K.
So there is an imminent need for a solution to introduce or develop newer navigation system which is both reliable and cost effective. In this project, a inertial sensor based navigation system along with deep learning navigation algorithm and Kalman filter optimization techniques are proposed for a more effective aircraft navigation system especially in regions where GPS signal is not available or tends to fail (forests regions).A INS integrated with GPS system is also proposed here to highlight the use of existing system and promote cost effectiveness in providing a solution to an existing problem.
OBJECTIVE OF THE PROJECTOur objective is to develop the GPS-INS integrated system so that it can be implemented on real time hardware like a microcontroller, microprocessor or a digital signal processor. Even though high accuracy sensors like gyroscopes and accelerometers are available. Integrating these sensors into existing GPS system ensures cost saving and through optimization methods like Kalman Filter the inertial sensors can be made to work independently in place where GPS in not available. In the scope of this project, the GPS provides an initial position and the system calculates future positions based on the integration of world reference-frame acceleration derived from accelerometer and gyroscope measurements using the inertial sensors.
BACKGROUNDThe project work mostly involves the physical interfacing of sensors, it is important to understand the theory behind the operation of the sensors involved, namely the concepts of inertial navigation. Inertial Navigation
Inertial navigation refers to estimating a system’s position based on measured changes to the motion of a system. To accomplish this, a combination of acceleration and angular rate measurement is used to compute linear motion as well as attitude (yaw, pitch, and roll). Accelerometers and gyroscopes are used to accomplish this task.
8.2 Dead Reckoning
Dead reckoning is the process of estimating a system’s position by using the previous position value (such as a coordinate provided by the GPS system) and then calculating a new position based on the sensed movement of the system. In the scope of this project, the GPS provides an initial position and the system calculates future positions based on the integration of world reference- frame acceleration derived from accelerometer and gyroscope measurements.
Strap down Solution
Unlike a gimballed system, which is able to keep inertial sensors at a fixed attitude regardless of system orientation, a strap down solution has sensors mounted on the system body to measure body-reference-frame changes in inertia. In order to compute acceleration in the fixed or world-reference-frame, any perceived changes in attitude must be integrated to determine system orientation with respect to the starting orientation (in this case, a level orientation with the accelerometer Y-axis facing north). With a known system attitude, it is both possible to compute the direction of gravity’s acceleration to remove its influence on system data and additionally to rotate the body-reference-frame acceleration into the world reference frame.
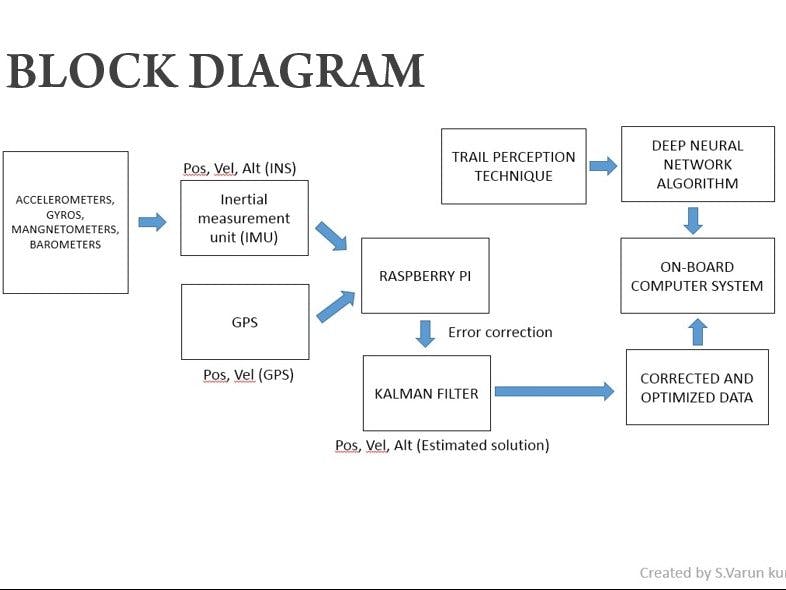
SYSTEM DESIGNThe complete hardware block diagrams and other components are given below respectively. Each system will be discussed in the following section.
MPU-9150 Inertial Measurement Unit
MPU-9150 Inertial Measurement Unit is the main sensor used for the project. This chip sends out nine axes of data: x acceleration, y-acceleration, z-acceleration, yaw-rate, pitch-rate, roll-rate, and three axes dedicated to magnetometer data. Additionally, the chip has the capability to calculate the quaternion and magnitude of the gravity vector in order to send world-reference-frame data to the user. World reference frame, as opposed to body or system reference frame, is the fixed coordinate frame denoted “North, East, and Down” and does not change even as the IMU rotates along any axis. This calculation is performed by the MPU-9150’s on-board DMP (Digital Motion Processor) in the form of three 16-bit accelerations (N, E, down) relative to the starting orientation. The magnetometer is capable of realigning for drift and is used to help the user the system’s determine starting orientation so that the north, east and down reference frame of the inertial sensor corresponds to that of the GPS.
SkyTraq Venus 634FLPx GPS
A GPS unit, the SkyTraQ Venus 634FLPx, is used to give the program its initial position and to correct for inertial sensor error during the course of operation for X and Y axis measurements. The Venus634FLPx contains all the necessary components of a complete GPS receiver module, includes GPS RF front-end, GPS baseband signal processor, 0.5ppm TCXO, 32.768kHz RTC crystal, RTC LDO regulator, and passive components. It requires very low external component count and takes up only 100mm2 PCB footprint.. The GPS receiver output sentences over UART serial communications.
BMP 280 Barometric Pressure Sensor
The GPS unit provides accurate X and Y coordinate positions, however, the application is for navigation in the event GPS is lost. As a result, the BMP 280 is added to correct for deviations in the Z direction even when the GPS is unavailable. The sensor reads surrounding pressure and temperature data which are then used to calculate altitude. BMP280 Barometric Pressure Sensor.
Raspberry Pi 3B Single-Board Computer
The heart of the system is the Raspberry Pi single-board computer. Its Linux operating system is used to run the multi-threaded C++ code which interfaces with sensors and saves processed sensor data to file. The IMU, GPS, and barometer are attached to the I/O pins of the Raspberry Pi via I2C, UART, and I2C, respectively. The program starts three threads which read and timestamp data from the external sensors, at which point a fourth thread processes the data and formats it for saving to file. Once the user stops data acquisition via a GPIO push button, the program writes all saved data to file.
METHODOLOGYThe project work can be divided into several sections,
1. The initial setup of the Raspberry Pi.
2. The interfacing of inertial sensors.
3. The writing of MATLAB post-processing code.
4. The interfacing of the GPS receiver.
5. Testing methods and optimization methods using Kalman filter.
6. Execution of DNN navigation system by trial perception technique to the on-board computer system.
INTERFACING PROCEDURESSetting up the Raspberry Pi
The first step in making the data acquisition system was to set up the Raspberry Pi Linux-based single board computer. This was achieved in the following steps:
1. Installing the “Raspbian” Linux distribution
2. Setting up SSH control of the system through PuTTy on Windows
3. Setting up samba file sharing between the Raspberry Pi and Windows
4. Setting up internet connection sharing via Ethernet (sharing the host computer’s Wi-Fi)
5. Setting up Wi-Fi on the Raspberry Pi via USB wireless adapter
6. Setting up cross-compilation on the Pi via NetBeans in Windows (this was later replaced
by on board g++ compilation)
7. Setting up Bluetooth keyboard and composite display output for portable operation (later
testing was controlled with a GPIO pushbutton and LED for information)
8. Installing program-related drivers.
Once setup was complete, it became possible to write code on a Windows PC, send it to the Pi via PSCP or samba file sharing, and control the Pi via SSH in PuTTY. Additionally, the Pi could be powered by an external 5V battery for an extended period of time (several hours) and taken on indoor/outdoor tests to collect data to file for later analysis.
Interfacing the Inertial Sensors
The MPU-9150 is connected to the Raspberry Pi via the I2C interface. It is composed of a MEMS accelerometer and gyroscope magnetometer. Using open-source drivers written for the MPU-6050 six-axis accelerometer + gyroscope IC, it is possible to read either raw acceleration, gyroscope, and magnetometer data from the respective devices or to make use of the on-board digital motion processor (DMP) which performs 6-axis sensor fusion with the accelerometer and gyroscope data.
Using the IMU-9150’s Digital Motion Processor which performs six-axis sensor fusion to compute a quaternion representation of attitude, the world-reference-frame acceleration is calculated by rotating a linear acceleration vector (raw acceleration with the magnitude of gravity subtracted). This data is then integrated to calculate a displacement from the starting position which the barometer and GPS data is then used to correct in MATLAB.
SETUP METHODSTRAP DOWN INERTIAL NAVIGATION SYSTEMS
Lightweight digital computers permit the system to eliminate the gimbals, creating strap down systems, where sensors are simply strapped to the vehicle. This reduces the cost, eliminates gimbal lock (Gimbal lock is the loss of one degree of freedom in a three-dimensional, three-gimbal mechanism that occurs when the axes of two of the three gimbals are driven into a parallel configuration, "locking" the system into rotation in a degenerate two-dimensional space), removes the need for some calibrations and increases the reliability by eliminating some of the moving parts.
A strap down system has a dynamic measurement range several hundred times than required by a gimballed system. That is, it must integrate the vehicle's attitude changes in pitch, roll and yaw, as well as gross movements. Gimballed systems could usually do well with update rates of 50–60 Hz. However, strap down systems normally update about 2000 Hz. The higher rate is needed to let the navigation system integrate the angular rate into an attitude accurately.
Strap down systems are nowadays commonly used in commercial and military applications (aircraft, ships, ROVs, missiles, etc.).State-of-the-art strap down systems are based upon Ring Laser Gyroscopes, Fibre Optic Gyroscopes or more recently on Hemispherical Resonator Gyroscopes. They are using digital electronics and advanced digital filtering techniques such as Kalman filter
A strap down INS is mainly comprised of three accelerometers and gyroscopes attached to the aircraft. Each accelerometer measures the motion of the aircraft in three directions of travel, while the three gyroscopes are used to obtain information about the direction the aircraft is facing. With the information from these sensors, the heading, speed and position of the aircraft can be computed. Compared to a traditional gimballed navigation system, a strap down INS significantly reduces cost and size of the system, and doesn’t require any external inputs or devices. However, due to errors in manufacturing and propagation errors in the on-board calculations, a strap down INS can have significant error, especially in low-cost systems.
Due to these issues, different compensation and calibration methods need to be used to correct errors caused by sensor and computation biases.
SELF-ALIGNMENT FEATUREEXISTING METHODS
Before flight, a strap down inertial navigation system must be calibrated, or aligned, to take accurate navigation measurements. One method of self-alignment is to physically shift and rotate the INS before take-off, however this may be expensive and impractical due to space and weight limitations.
ALTERNATE METHOD
To determine the orientation of the platform analytically. Using data collected from sensors prior to take-off, measurements of its current heading are made and compared with predefined values of Earth’s gravity and rotation. This alignment method be easily implemented with existing on-board computers. This enables the proper operation of the IMU even under critical situations thus providing the pilot with navigational information.
ERROR CORRECTION TECHNIQUES
One affordable method used to compensate for this error is to apply computational filters, such as the Extended Kalman Filter (EKF). The EKF reduces errors by fitting non-linear measurement data to a predetermined linear model. The corrected INS measurements obtained from applying the filter will be similar to the results obtained from the control measurements, showing how filtering strapdown INS measurements can significantly improve the accuracy of attitude measurements.
KALMAN FILTERING BASED NAVIGATIONThe Kalman filter is a set of mathematical equations that is based on dynamic model of system. These equations are used to make an estimate of the current state of a system and correct the estimation using any available sensor measurements. Using this filter that really is an estimator corrector mechanism, leads to the optimal estimation of linearized system and measurement system model. Extended Kalman Filter is used to integrate two systems when the state of the system follows continuous state dynamics and the measurement of the second system is related to the estimates provided by the first system. The second system is used to correct the state estimates provided by the first system to yield an increased accuracy in state estimation. Integration of INS/GPS can be done in two ways one is by feed forward method and other is by feedback method.
The first and the second systems represent process and measurement models respectively. The state estimates and the measurements provided by the first and second systems are denoted by x and z respectively. INS and GPS are considered as process and measurement models respectively. Extended Kalman Filter (EKF) can be used to integrate INS and GPS for an increased accuracy and reduce the errors produced by the proposed INS in aircrafts.
DEEP NEURAL NETWORK BASED NAVIGATION SYSTEMStructure of DNN
Machine learning techniques have been used for a long time to map visual inputs to actions. A DNN is a feed-forward connectionist model built out of successive pairs of convolutional and maxpooling layers, followed by several fully connected layers. One of the advantages of DNNs over common alternatives for supervised image classification is generality: in fact, features are learned directly from data, and do not have to be chosen or designed by the algorithm developers for the specific problem on which they are applied.
PROPOSED EXECUTION USING DNN
A trail perception technique based on Deep Neural Networks can be formulated where a dataset of the features is provided for download which can be efficiently acquired and used to train and test the Deep Neural Network model of the aircraft.The DNN system will be integrated into the aircraft computer system along with the INS.Based on the trial the aircraft travels directions are constantly updated based on outcomes of the trained model and it also learns new trails and provide navigational routes. This can be greatly helpful in times of GPS failure or non-availability.
CONCLUSIONOwing to the given problem statement “Design a system which would ensure high navigation solution integrity even in an environment with poor or no GPS/Satellite navigation signal. The system can either be an independent sensor or may make use of existing self-contained systems” The given solution of OPTIMIZED INERTIAL NAVIGATION SYSTEM AND DNN FOR AIRCRAFTS/HELICOPTER/UAV. The proposed IMU provides with essential data for navigation where, using Kalman filtering, it is possible to combine those sensor data to help mitigate any errors within a single sensor to create a more reliable independent navigation system. Combining barometer and z-axis acceleration data, it is possible to get a more reliable estimate of altitude changes. Combining GPS and X and Y axis accelerometer data, it is possible to get reliable displacement estimate within a couple of meters of actual, real-world displacement. Moreover incorporating DNN into the flight controller can further enhance the navigation system.
However, when GPS data is not available, such as in a heavily forested area, the system can rely entirely on INS sensor data and the trained DNN model for X and Y displacement to accurately determine the navigation route.
REFERENCES1. D. Titterton and J. Weston, Strapdown Inertial Navigation Technology, 2nd ed. Reston, VA: AIAA, 2005.
2. InvenSense. MPU-9150 Datasheet, 18 Sept. 2013. Web. http://www.invensense.com/mems/ gyro/documents/PS-MPU-9150A-00v4_3.pdf.
3. SkyTraq Technology, Inc. Venus638FLPx GPS Receiver Data Sheet, 24 Feb. 2010. Web.https://dlnmh9ip6v2uc.cloudfront.net/datasheets/Sensors/GPS/Venus/638/doc/Venus638FLPx_DS_v07.pdf
A. Weiss and J. Rowberg. 9 Degrees of Freedom - MPU-9150 Breakout (2013), GitHubrepository. https://github.com/sparkfun/MPU-9150_Breakout
4. K. Townsend. Adafruit Unified BMP085/BMP180 Driver (2013), GitHub repository. https://github.com/adafruit/Adafruit_BMP085_Unified
5. G. Henderson. Gordon’s Projects - WiringPi (2011), Web. https://projects.drogon.net/raspberry-pi/wiringpi/
6. Schmidt, G.T., \Strapdown Inertial Systems - Theory and Applications, “AGARD Lecture Series, No. 95, 1978.
7. Bar-Itzhack, I.Y., and Berman, N., \Control Theoretic Approach to Inertial Navigation Systems, “Journal of Guidance, Vol. 11, No. 3, 1988, pp. 237-245.
8. Grewal, M.S., and Andrews, A.P., Kalman Filtering: Theory and Practice usingMATLAB, John Wiley and Sons, New York, 2001.
9. Grewal, M.S., Weill, L.R., and Andrews, A.P., Global Positioning Systems, Inertial Navigation, and Integration, John Wiley and Sons, New York, 2001.
10. Barbour, Neil and Howell, William C. (2014). Inertial navigation system. In AccessScience. McGraw-Hill Education. http://dx.doi.org/10.1036/1097-8542.342700.
11. Eure, K. W., Quach, C. C., Vazquez, S. L., & Hill, B. L. (2013). An application of UAV altitude estimation using a low-cost inertial navigation system No. NASA/TM-2013-218144). Hampton, Virginia: NASA.
12. Nitti, D. O., Bovenga, F., Chiaradia, M. T., Greco, M., & Pinelli, G. (2015). Feasibility of using synthetic aperture radar to aid UAV navigation. Sensors, 15(8) doi:10.3390/s150818334.
13. Rapoport, I., & Brandes, A. (2010). Analysis of sculling motion errors caused by sensor transfer function imperfections in strapdown inertial navigation systems. Paper presented at the Position Location and Navigation Symposium (PLANS), 2010 IEEE/ION, doi:10.1109/PLANS.2010.5507184.
14. Silva, F. O., Leite Filho, W. C., & Hemerly, E. M. (2015). Design of a stationary self-alignment algorithm for strapdown inertial navigation systems. Ifac-Papersonline, 48(9), Nov 8, 2016.
15. Titterton, D. H., & Weston, J. L. (2004). Strapdown inertial navigation technology (2nd ed.) Institution of Engineering and Technology.
16. Zhang, L., Lian, J., Wu, M., & Zheng, Z. (2009). Research on auto compensation technique of strap-down inertial navigation systems. IEEE Xplore, doi:10.1109/CAR.2009.80.



_3u05Tpwasz.png?auto=compress%2Cformat&w=40&h=40&fit=fillmax&bg=fff&dpr=2)
Comments