


Hardware components | ||||||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
Software apps and online services | ||||||
 |
| |||||
Hand tools and fabrication machines | ||||||
| ||||||
 |
| |||||
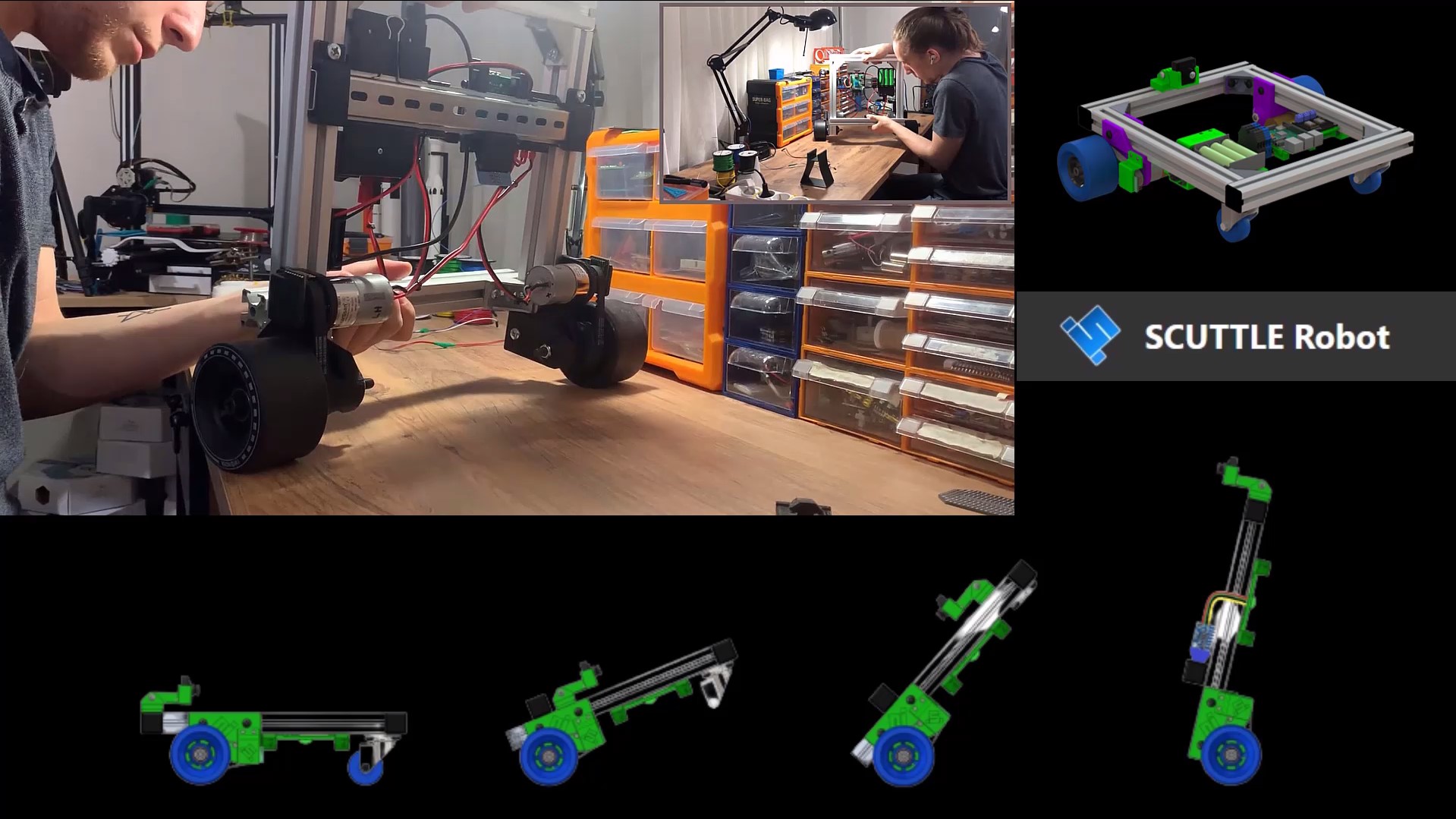
This project was built with the support of SCUTTLE™.
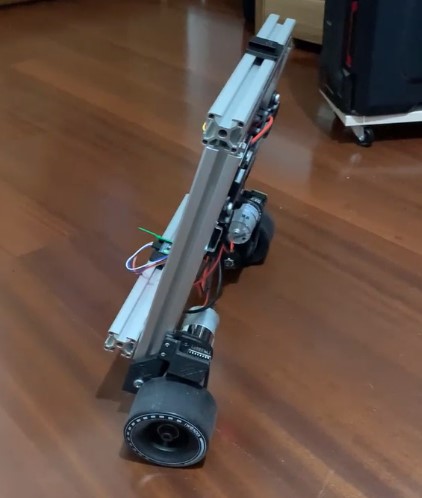
About The ProjectThis project's subject is to make SCUTTLE Robot balance itself on its two wheels only modifying its default shape and use external MPU6050 sensor in addition. Main idea of this project comes from David Malawey who is Founder of The Scuttle™ and I am glad to bring this idea to reality. Before working on this project I had one project similar to this and it's called "LOTP Two-Wheeled Self-Balancing Robot" and its purpose is to make a 3D printed frame, stepper motor driven and Raspberry Pi Pico based two wheels self-balancing robot.
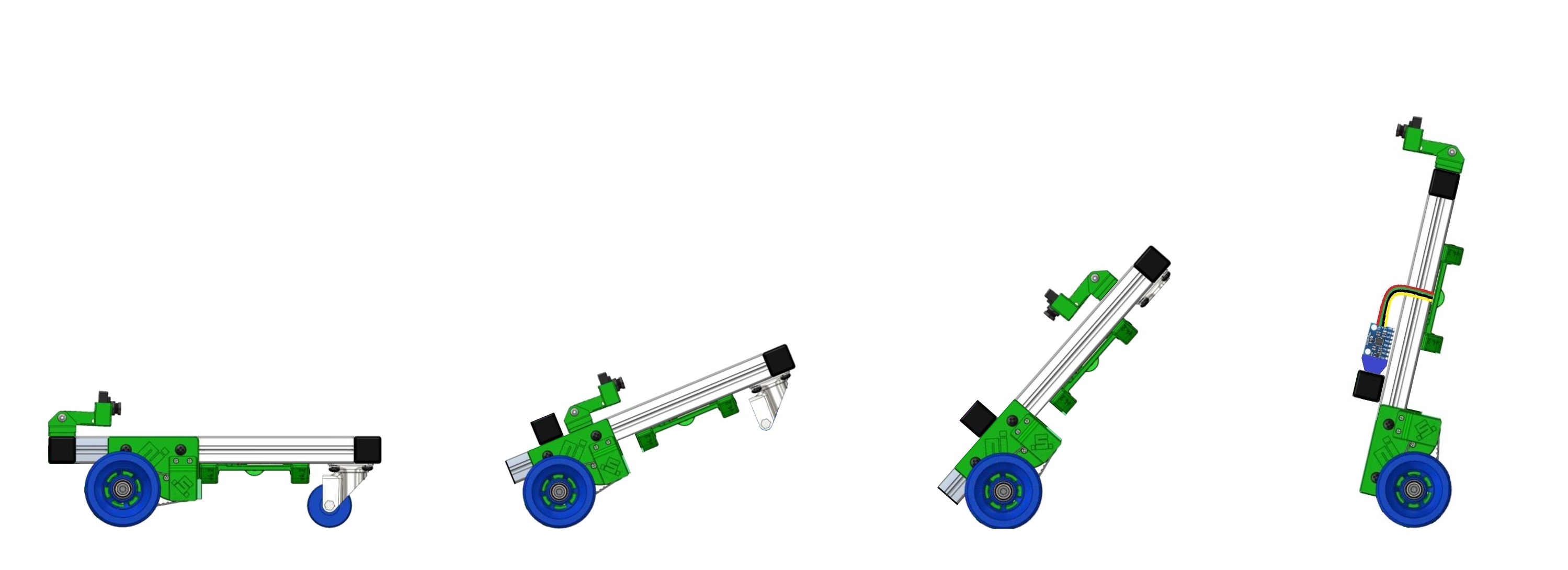
However I have built a two wheels self-balancing robot before, there were a few challenges on this project which I enjoyed a lot. Scuttle Robot has already a predefined setup and I was limited to transform current model in a most easiest and efficient way. Also a new part was designed and printed for this project to be able to hold MPU6050 sensor on the chassis.
Final result is a milestone and an evolutionary progress at SCUTTLE development for all community. SCUTTLE Robot is designed very efficiently and maker friendly. Standard form is a very good start for different purpose designs. It may be adapted for various potential tasks. There are still many challenges hidden at SCUTTLE Robot for curious makers. This project is a very good sample of that. I hope you enjoy while you are building your own.
Hardware Transformation Video GuideSoftware Installation Video GuideRequirements
If you want to replicate this project on your own, you'll need;
- Raspberry Pi Computer,
- Scuttle Robot Base Parts,
- MPU6050
- Custom 3D Printed Parts,
- Basic Python Knowledge,
- Basic understanding of PID Controller (in case of re-tuning PID)
With all of those you can easily remake or iterate on top of it.
All project files & documents as an open-source project shared on GitHub link given below.
https://github.com/SMDHuman/ScuttleBalancingRobot
The contents of the shares are as follows
1. 3D Design Files (MPU6050 Mounting Kit)
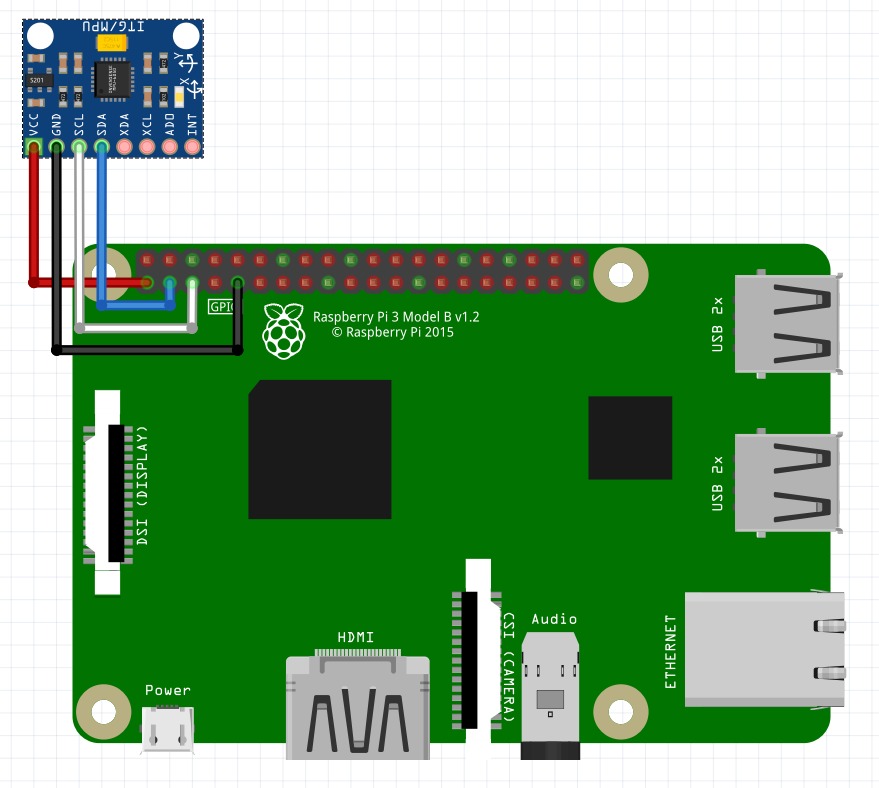
2. MPU6050 and Raspberry Pi connection diagram
3. Software
4. Documents
a. Transformation from Standard Model to Self-Balance Robot Guide
b. Raspberry Pi OS and Self-Balancing Software Installation Guide
c. List of Items and Supply Links
First of all you need the robot itself to install and run the programs. If you have one, then you are lucky! You just need to transform the shape of the robot and attach external MPU6050 sensor and a 3D print part to mount it. You can start this process by looking up my step by step YouTube guide with English subtitle or check out the PDF of the transformation of the robot from base model to self-balancing configuration.
If you don't have the robot, then you can obtain all the parts from Scuttle Shop or from your local shops. You can look the parts and specification of those parts from this PDF or in that Link. You will find lots of documentation about SCUTTLE Robot in this link too.
Wiring of Necessary ComponentsYou have to wire all electrical components to each other that are in use of our project. We need to wire
- Batteries to Regulator,
- Batteries to Motor driver,
- Regulator to Raspberry Pi,
- Raspberry Pi to Motor Drivers,
- Motor Driver to DC Motors,
- MPU6050 to Raspberry Pi.
You can check out the connections of all parts and more from this Link except MPU6050. MPU6050 needs to connect to Raspberry Pi as the picture shows under below.
Installation
You can follow the step by step guide from this document prepeared for installation of OS and running the python code for self balancing scuttle robot.



_M1dPDT5YxN.jpg)






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
_M1dPDT5YxN.jpg){kind=link}
Comments