DescriptionVerti-Fix is a wearable device that houses accelerometers to quantify the angle of the head as it is tilted for the Epley Maneuver to treat Benign Paroxysmal Positional Vertigo (BPPV). The device is also equipped with LEDs to warn the user as they get close to exceeding the recommended angles and contains an interactive screen to allow the appropriate sub-type of the Epley maneuver to be chosen.
Check out our video to get a better idea of our project.
Executive SummaryProblem: A disease affecting 8 million Americans and one in four people over the age of 65 (Liu, et al., 2017). BPPV, shortened for Benign Paroxysmal Positional Vertigo, is a condition that causes symptoms like dizziness, loss of balance, nausea, and a perception of your surroundings spinning. Unfortunately treatment is very hard to get as non-specialist physicians will choose to not perform the maneuvers because they believe it will cause further harm to the patient if done incorrectly. The lack of experience and level of difficulty in performing the maneuvers is limiting people with vertigo from receiving treatment that is more accessible. Currently, patients within the United States may need to travel for several hours to reach a vestibular specialist to have the Epley maneuver conducted to relieve their symptoms.
Solution: The Verti-Fix is a device that is capable of addressing key requirements for the Epley maneuver to relieve symptoms of BPPV. (1) The angle the head is tilted during the procedure is essential and Verti-Fix is capable of tracking this accurately using accelorometers. (2) LED are used to warn the performing physician if they get close to exceeding the recommended angles. This prevents general physicians from worsening the symptoms. (3) The device is portable and contains an interactive interface that is easy to use and will allow easy adoption of the technology.
Differentiation: Prior solutions involved the use of images and videos to walk people through the procedure, but the uncertainty that comes with moving the head a certain angle still needed to be addressed. Verti-Fix can provide quantitative data during the process and can provide real time warnings to physicians if they exceed a certain angle. Additionally, images and videos cannot clearly communicate the exact angle the head is tilted for different patients. On the other hand, Verti-Fix can be used with videos to provide a comprehensive solution to this problem.
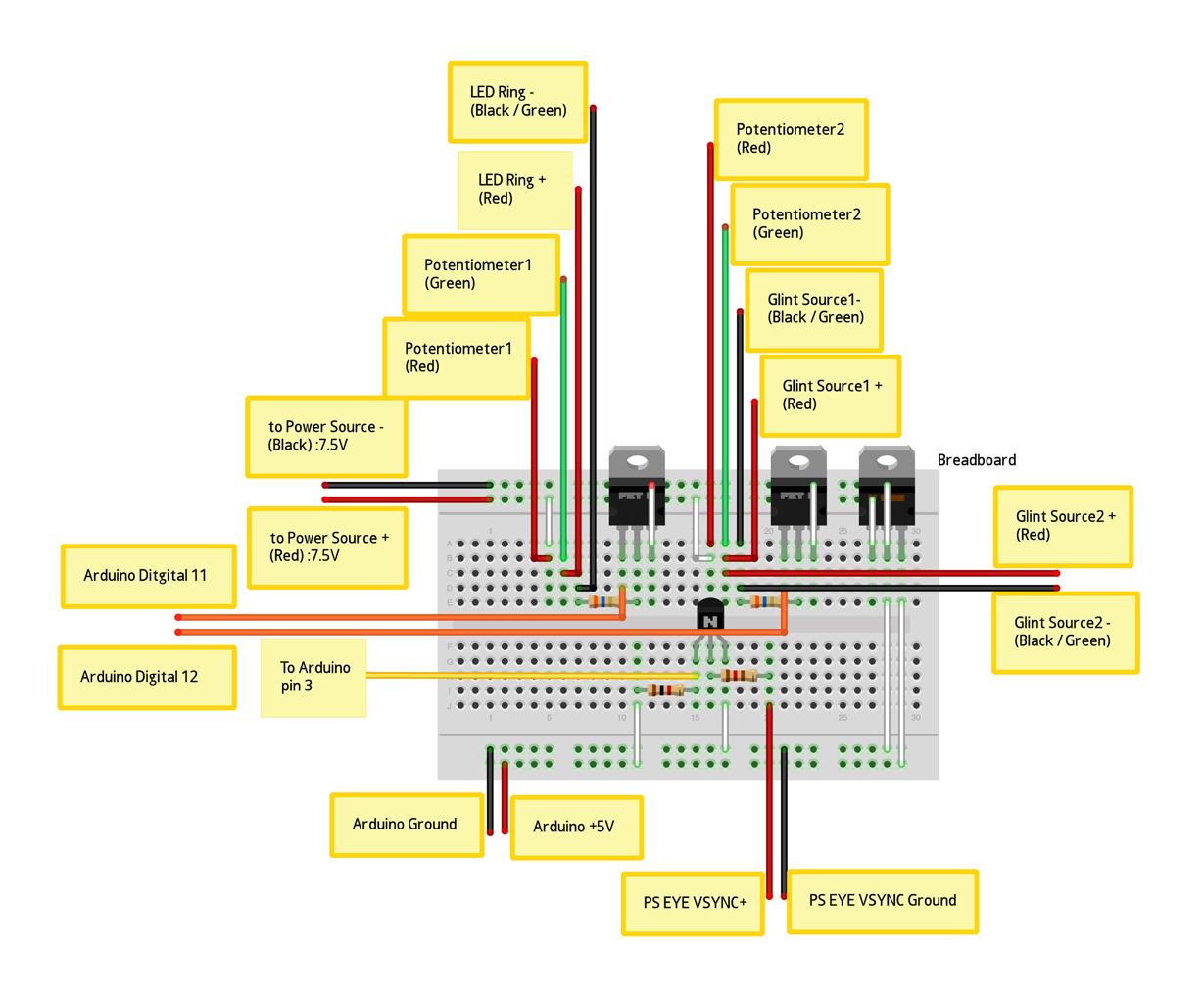
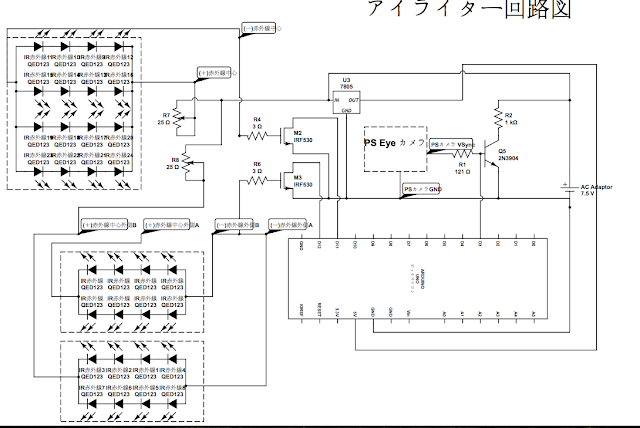
Current PrototypeThe device consists of a motion sensing apparatus that is fitted to the patient. This is primarily responsible for providing the patient with instructions and ensuring the movements are carried out properly. A simplified block diagram of the circuitry is illustrated below.
Simplified Movement Tracking Block Diagram
This movement tracking was centered around an Arduino microcontroller for rapid development and prototyping. The microcontroller carries out three main tasks: perform position calculations based on data from the inertial measurement unit (IMU), instruct the user how to move their body, and ensure movements are carried out properly. All three of these tasks are carried out by a programmed state machine. After the user selects the ear that the problem is located in, the program quite literally steps through the movements with the user. During each step, the program checks the following criteria mainly concerned with the chin tilt, neck rotation, and side to side tilt of a user’s head. In addition, it also checks rotational speeds to ensure movements are not carried out too slowly or quickly. Each step has a unique set of criteria that must be checked in order to be sure the proper movement was carried out, hence the state machine based program design. After all the criteria are met, the program moves to the next step. If the criteria is not met, or the device picks up measurements that should not be detected with the current movement, the program returns to the first instruction, while alerting the user that they will have to restart.
The way the user is actually instructed is through a display. On this display, the step number is displayed to give the user an indication of how many more steps they are required to complete. In addition, there are two lines actually describing the movement. The movement instructions are simple enough to always fit on these two display lines. The final line is used to display a criteria that needs to be met for the step to be considered complete. This can come in the form of a live update of how far a patient has turned their head or a countdown of how long they have to remain still in a position.
Inside of the Central Control with Different Components
To address the problem, Purdue MIND developed the Verti-Fix. A device capable of assisting general physicians through the Epley maneuver and will help relieve the symptoms that arise due to BPPV. Until now, the Epley maneuver could only be attempted by vestibular specialists due to the complexity of the maneuver and the possibility of exacerbating the negative symptoms if done incorrectly. The head needs to be moved in certain angles to move the calcium carbonate crystals in the inner ear back to its correct location. However, if the maneuver is done incorrectly, the crystals may be moved down the wrong inner ear canal and cause the symptoms to continue. This means that general physicians generally pass on these cases to vestibular specialists, who are not as common and require patients to travel long distances to treat their symptoms. We worked with a vestibular specialist to ensure that Verti-fix would address this problem and provide general physicians, who have little experience with the Epley maneuver, the guidelines to treat the condition. Verti-fix contains accelerometers that can track the angle of the head and would walk general physicians through the procedure and ensure that proper angles are maintained. Prior solutions involved the use of images and videos to walk people through the procedure, but the uncertainty that comes with moving the head a certain angle still needed to be addressed. Verti-fix can provide quantitative data during the process and can warn physicians if they exceed a certain angle. Moreover, our device is capable of sufficient measurement accuracy to ensure the movements are carried out properly. Additionally, the angles will be displayed on a screen that can be used to follow along the Epley maneuver, with LEDs present to provide an additional warning system in case the head gets close to exceeding the recommended angle during a particular section of the procedure.
We are in the progress of implementing wireless capabilities to the device so there is no wire between the head sensor and the wrist display. This will enable better movement and ease of use for users. We also have made sizable improvement by adding two more features to the device. One is a neck brace meant to stabilize the neck for the maneuvers, thus solving common maneuver mistakes done with inexperienced users. Second is an eye tracking add on that enables the physician to visually see the nystagmus allowing for easier diagnosis of the condition.
Current Progress Image of Eye Tracking Prototype Component
In the IEEE Spectrum magazine issue Under African Skies (May 2019), chief scientist at Dolby Laboratories and adjunct professor at Stanford University Poppy Crum wrote a fascinating article titled Here come the Hearables. In this article, Professor Crum elaborates on the fact that the ear is an untapped well of erudition about a person. She describes it as a USB port to the body. Brain electrical activity, movement, temperature, eye movements, vagus nerve stimulation, blood oxygen, and stress hormone levels are just a few of the numerous types of data that can be accessed through the ear. Crum coins the term “hearables, ” prognosticating that the ear will be used to monitor biological systems and be an empathetic type of technology. With AI technology exponentially growing in our day and age, there’s no doubt that hearables would learn and know the intricate details of its owner. Verti-Fix barely scratches the surface of what hearables will be capable of in the future. We use head movements and eye movements to diagnose and correct BPPV. Since the ear has an extraordinary amount of other information, we can use it to diagnose and correct other diseases. We as a group can continue to work on “hearable” devices since we have the experience of designing and prototyping Verti-Fix, allowing us to disrupt the very market we pioneer. In short, Verti-Fix is capable of ushering in field of technology that uses the ear as a window to the human body.
As mentioned above, we are working on implementing a wireless design to facilitate use for the patients and doctors. Since the components are modular, it will be more useful if they do not need to all be wired together.
Once the basics are completed, we could potentially include AI to aid in the diagnosis to take other symptoms into account and confirm that a patient does have BPPV. As of current, the GPs and ER doctors will need to spend time to learn about all the symptoms and make a decision, whereas the symptoms could be inputted into a computer (with voice perhaps for the ease of potential BPPV patients) and AI could determine whether or not the patient has BPPV.
CompletenessAll of the fundamental groundwork for Verti-Fix has already been laid, and initial prototyping shows the success that is required to say that the work is fully developed. Testing of the head tracking device shows that it is fully capable of detecting whether movements are correct. The only improvement needed is calibration of tolerances to allow some leeway in carrying out the maneuvers. The nystagmus device is based around existing eye tracking technology, so the technology for this component is already well developed.
The device has two designed functions: indicate which ear the problem resides in, and allow the execution of a set of maneuvers that solve the problem. The device currently is capable of actively monitoring the carrying out of maneuvers, and is almost capable of diagnosing which ear the problem resides in based off of nystagmus. With this, we can say that the device will fully be able to realize designed functions within a short period of time and with minimum upgrades.
Current Device Capable of Intended Purpose, Non-Wireless Version
This product can be feasible in 2 years. The most advanced technology in this system would be the eye-tracking to detect nystagmus. The head movements are controlled by a simple inertial measurement system interfaced to a microcontroller. With the possible improvements we can make to the Verti-Fix, the technology we are developing is at the forefront of innovation and will definitely be feasible and hopefully a popular product.
Since most of the technology is rather simple, it is feasible to produce the product at a minimal cost that suits the users and return a profit. Based on our market research, we will target the Verti-Fix towards the elderly, since BPPV is more common in the elderly. According to a research done by Yetizer and Ince, BPPV is commonly found in the age group of 31 to 50 years old. They also stated that this condition is relatively rare for people under the age of 20. A device like the Verti-Fix, with its promise to restore autonomy to the lives that we want to help. Verti-Fix would be part of the rehabilitation devices and equipment market. This market is currently valued at 10.53 billion USD in 2016 and will grow due to the degenerative diseases. It will also grow due to the longevity of human life as well as the increasing population (Grandview).
Demographic analysis of benign paroxysmal positional vertigo as a common public health problem
Potential channel distributions would be primarily online for patients who may need to travel great lengths to obtain the product or for hospitals looking to stock their inventory with our product. It could also be sold in pharmaceutical shops like Walgreen's or CVS.
The end users would be patients who either have chronic BPPV and need correction quite often or patients who suspect that they may have BPPV and want to confirm diagnosis. It would be recommended for a patient to confirm with their doctor about the diagnosis just to make sure. Other users would be general practitioners or ER doctors who have patients that likely have BPPV.
ReferencesBenign Paroxysmal Positional Vertigo (BPPV). (2019, March 26). Retrieved from https://vestibular.org/understanding-vestibular-disorders/types-vestibular-disorders/benign-paroxysmal-positional-vertigo
Crum, P. (2019, May 01). Hearables Will Monitor Your Brain and Body to Augment Your Life. Retrieved from https://spectrum.ieee.org/consumer-electronics/audiovideo/hearables-will-monitor-your-brain-and-body-to-augment-your-life
Liu, D., Kuo, C., Wang, C., Chiu, C., Chen, T., Hwang, D., & Kao, C. (2017, December 12). Age-Related Increases in Benign Paroxysmal Positional Vertigo Are Reversed in Women Taking Estrogen Replacement Therapy: A Population-Based Study in Taiwan. Retrieved May 15, 2019, from https://www.ncbi.nlm.nih.gov/pmc/articles/PMC5732995/
Rehabilitation Devices/Equipment Market Size | Industry Report, 2025. (n.d.). Retrieved from https://www.grandviewresearch.com/industry-analysis/rehabilitation-products-market
Yetiser, S., & Ince, D. (2015). Demographic analysis of benign paroxysmal positional vertigo as a common public health problem. Annals of medical and health sciences research, 5(1), 50–53. doi:10.4103/2141-9248.149788

















_4YUDWziWQ8.png?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff)







_t9PF3orMPd.png?auto=compress%2Cformat&w=40&h=40&fit=fillmax&bg=fff&dpr=2)


_Ujn5WoVOOu.png?auto=compress%2Cformat&w=40&h=40&fit=fillmax&bg=fff&dpr=2)

_3u05Tpwasz.png?auto=compress%2Cformat&w=40&h=40&fit=fillmax&bg=fff&dpr=2)
{kind=link}
{kind=link}
Comments