

Hardware components | ||||||
_wzec989qrF.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff) |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
Software apps and online services | ||||||
 |
| |||||
| ||||||
_4YUDWziWQ8.png?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff) |
| |||||
Hand tools and fabrication machines | ||||||
 |
| |||||
 |
| |||||
SPRING 2026COMPLETED
ASCEND SPRING 2026 — ATMOSPHERIC RESEARCHOur most recent launch. Spring 2026 launch successfully completed. The team profiled stratospheric conditions with the full integrated payload stack, building on Fall 2025 engineering achievements. Payload and data recovered.
- Peak altitude: 82,498 ft
- Multi-spectral UV & atmospheric sensor suite
- Beta/gamma radiation peak: 524 CPM near 63.3K ft
- Full avionics stack — RECOVERED
- Mission report filed with Arizona Space Grant
- 182, 902 telemetry data points collected
Faculty: Dr. Eddie Ong · MR. ERNEST VILLICAÑA
Mentors: Adam · Maxx
Crew: Ethan P. · Garret N. · Preston F. · Loukas S. · Emma L. · Jose O.
FALL 2025COMPLETED
ASCEND Fall 2025 — Atmospheric ProfilingRecord-breaking mission achieving 101, 260 feet with a comprehensive sensor suite and optimized mechanical design. Full avionics stack recovered. Data processed and analyzed.
- Peak altitude: 101,260 ft (30, 864 m)
- Carbon-composite vehicle architecture
- Geiger counter modified & 360° Stabilized Runcam2 array
- Student-led mission design, integration & operations
Faculty: Dr. Eddie Ong · MR. ERNEST VILLICAÑA
Ground Control: Orion M. · Lorynn G. · Rafael S. · Tino M. · Jessica F. · Johnathan C. · Tracy C. ·
Crew: Nate O, · Adam F. · Ethan P. · Garret N. · Preston F. · Loukas S. · Emma L. · Jose O.
DEC 2025COMPLETED
ASCEND Fall 2024 — UV ProfilingMulti-spectral solar radiation study using AS7331 sensors to evaluate stratospheric ozone health.
- Summit altitude: 26, 200 m
- 38, 942 spectral data points
- Peer-reviewed research outcome
NOV 2024COMPLETED
ASCEND Fall 2024 — Temperature AnalysisCross-validating onboard BME688 data with NOAA radiosonde data for predictive modeling coursework.
- Peak altitude: 27,800 m
- 42,156 ground-streamed points
- AZ Space Grant debriefing
Mission design reviews, fabrication, and flight readiness checklists.
ASCENTLive tracking via dual GPS, 1-minute cadence telemetry broadcast.
RECOVERYANSR FLIGHT LOG
Mar 28, 2026
ANSR-161/162
ASCENDASCEND Spring 2026
82,498 ft
Intersection of AZ-347 and HWY-84
Very windy day and difficult recovery near San Tan Park / Gila Reservation line. Balloon burst earlier than expected.
Dec 6, 2025
ANSR-157/158
ASCENDASCEND Fall 2025
101,260 ft
UA Maricopa Ag Center
Rescheduled from Nov 22 due to weather. Easy launch and recovery!
Oct 25, 2025
ANSR-156
ANSROct Check Out
Mar 28, 2025
ANSR-155/156
ASCENDASCEND Spring 2025
94,620 ft
Freeman Road exit, Gila Bend
Nov 23, 2024
ANSR-153/154
ASCENDASCEND Fall 2024
102,000 ft
Freeman Road exit, Gila Bend
May 11, 2024
ANSR-151/152
ASCEND Spring 2024
102,964 ft
Freeman Road exit, Gila Bend
Rescheduled from March 23, 2024.
Apr 8, 2024
ANSR-assisted
ANSRAZ-NEBP Total Eclipse Flight
National Eclipse Ballooning Project
Mar 9, 2024
ANSR-assisted
ANSRAZ NEBP Flight Test
Jan 27, 2024
ANSR-149
ANSR2024 QuartzFest / Quartzsite HamFest
Nov 18, 2023
ANSR-147/148
ASCENDASCEND Fall 2023
103, 988 ft
Near AZ60 & I-10 Interchange
Oct 14, 2023
ANSR-assisted
ANSRAZ-NEBP Annular Eclipse Flight
National Eclipse Ballooning Project (NEBP)
Sep 9, 2023
ANSR-assisted
ANSRAZ NEBP Flight Test
Jul 15, 2023
ANSR-146
ANSRNADXA Flagstaff HamFest Balloon Flight
Flagstaff, AZ
Jun 24, 2023
ANSR-145
ANSRYARC Field Day Balloon Flight
YARC ARRL Field Day
Apr 1, 2023
ANSR-143/144
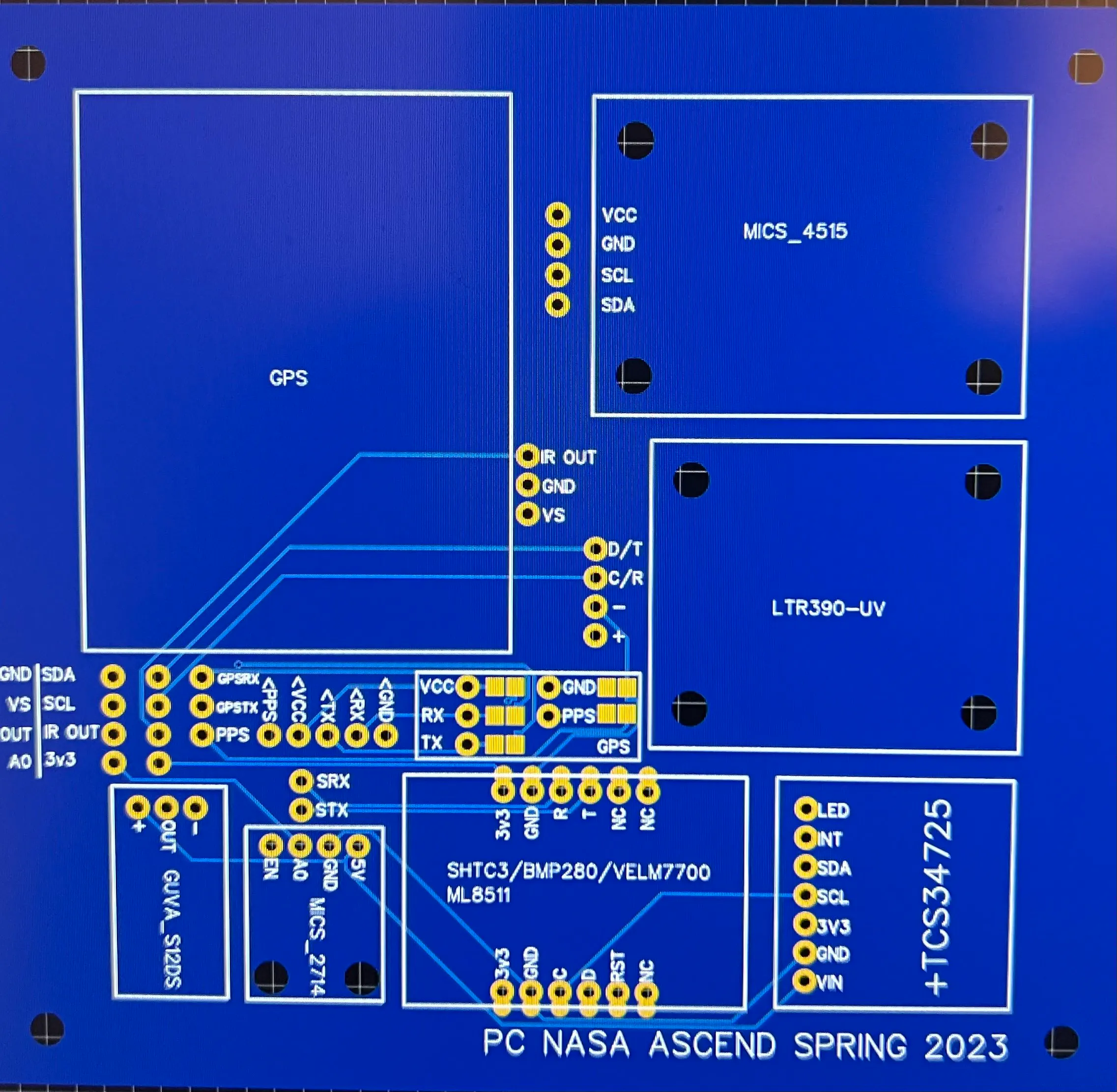
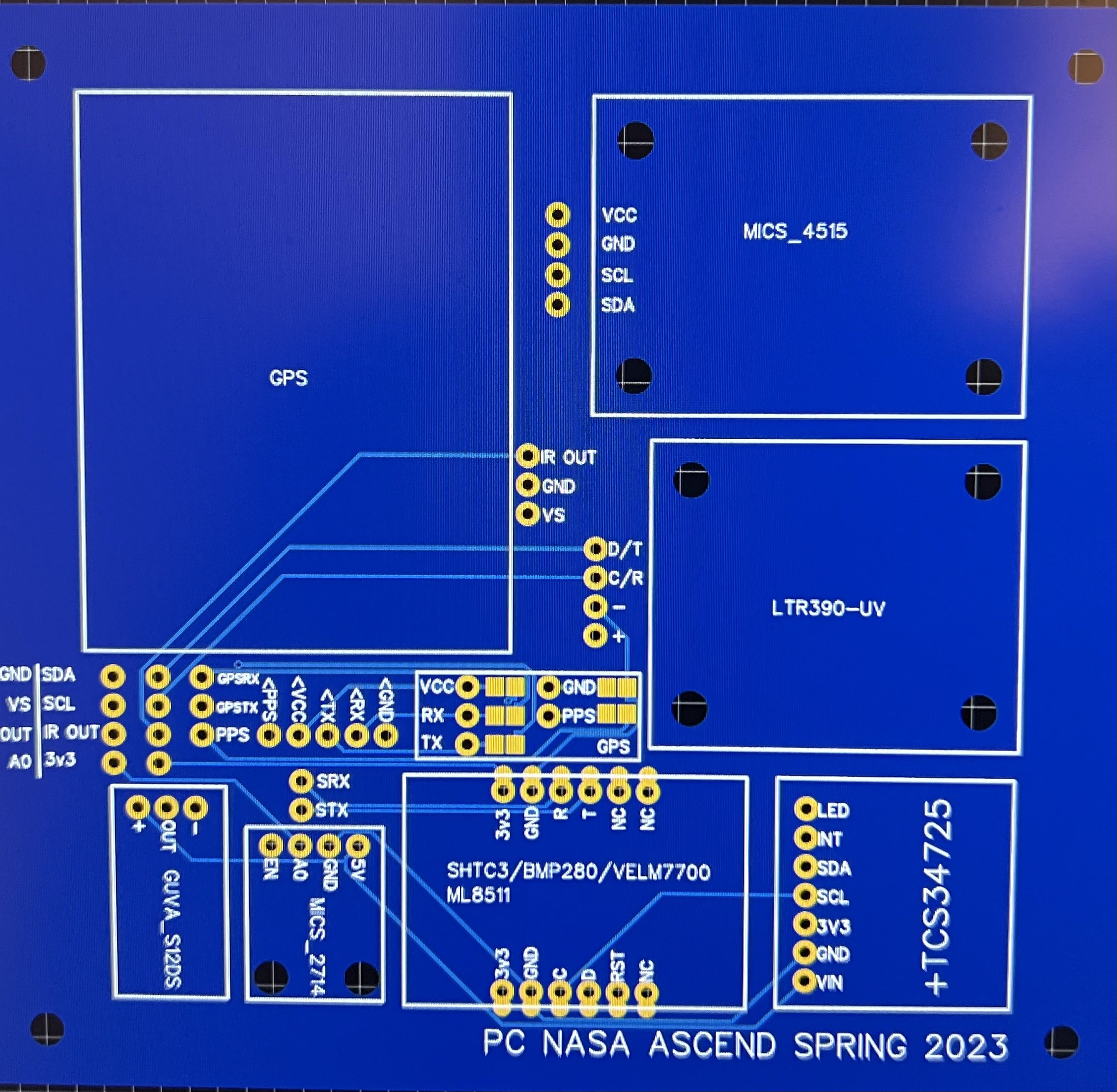
ASCEND Spring 2023
Near AZ60 & I-10 Interchange
Balloon had a hole; had to refill. Landed near Aguila, AZ in difficult area. ANSR retrieved payloads.
Jan 28, 2023
ANSR-142
ANSR2023 QuartzFest Quartzsite HamFest
Quartzsite, AZ
Nov 19, 2022
ANSR-140/141
ASCENDASCEND Fall 2022
102,272 ft
UA Maricopa Agricultural Center
Difficult retrieval. Balloon 2 parachute tangled; impact at ~55 mph.
Oct 29, 2022
ANSR-139
ANSR CopaFest 2022
Apr 2, 2022
ANSR-137/138
ASCENDASCEND Spring 2022
97,000 ft
Freeman Road exit, Gila Bend
Feb 19, 2022
ANSR-136
ANSRYuma Hamfest & SW Division Convention
Yuma, AZ
Nov 20, 2021
ANSR-134/135
ASCEND Fall 2021
103,670 ft
AZ-85, ~12mi S. of Gila Bend
ADS-B battery shifted during flight on 134, disconnecting power.
Oct 30, 2021
ANSR-133
ANSRCopaFest 2021
Mar 27, 2021
ANSR-131/132
ASCENDASCEND Spring 2021
UA Maricopa Agricultural Center
Oct 24, 2020
ANSR-130
ASCEND Fall 2020
Gila Bend, AZ
Make-up flight for Spring 2020 (canceled due to COVID).
Nov 23, 2019
ANSR-128/129
ASCEND Fall 2019
106,909 ft
Pinal County, AZ
Balloon 2 passed Balloon 1, but 128 went farther downrange due to slower ascent rate.
Nov 13, 2019
ANSR-127
ASCEND Diné College Fall 2019
101,755 ft
Diné College, Tsaile, AZ
Oct 26, 2019
ANSR-126
ANSRCopaFest 2019
Jun 1, 2019
ANSR-125
ANSR Prescott Hamfest
Prescott, AZ
Mar 30, 2019
ANSR-123/124
ASCENDASCEND Spring 2019
96,819 ft
Pinal County, AZ
Onboard data loggers may have captured slightly higher altitude.
Mar 26, 2019
ANSR-122
ASCEND Diné College Spring 2019
75,927 ft
Diné College, Tsaile, AZ
Onboard data loggers may have captured a slightly higher altitude.
Nov 17, 2018
ANSR-120/121
ASCEND Fall 2018
106,955 ft
Maricopa
Mar 3, 2018
ANSR-115/116
ASCEND Spring 2018
96400 ft
Dateland
Nov 17, 2017
ANSR-112/113
ASCEND Fall 2017
97,500 ft
Gila Bend
Apr 1, 2017
ANSR-105/106
ASCENDASCEND Spring 2017
Maricopa
Nov 19, 2016
ANSR-103/104
ASCEND Fall 2016
101,692 ft
Stanfield
Apr 2, 2016
ANSR-97/98
ASCENDASCEND Spring 2016
96,619 ft
Maricopa
Nov 21, 2015
ANSR-94/95
ASCEND Fall 2015
78,816 ft
Maricopa
Mar 1, 2015
ANSR-88
ASCEND Spring 2015
94,688 ft
W. Pinal Park
Nov 1, 2014
ANSR-86
ASCEND Fall 2014
93,483 ft
Maricopa
Mar 29, 2014
ANSR-81
ASCENDASCEND Spring 2014
73,794 ft
Freeman Exit I-8
Nov 23, 2013
ANSR-78
ASCEND Fall 2013
86,349 ft
Dateland
Mar 23, 2013
ANSR-74
ASCENDASCEND Spring 2013
93,000 ft
Maricopa
Nov 17, 2012
ANSR-71
ASCENDASCEND Fall 2012
97,940 ft
Maricopa
Mar 31, 2012
ANSR-67
ASCENDASCEND Spring 2012
97,940 ft
Maricopa
Nov 19, 2011
ANSR-65
ASCEND Fall 2011
89,977 ft
Quartzsite
Mar 26, 2011
ANSR-60
ASCENDASCEND Spring 2011
85,978 ft
Gila Bend
Nov 20, 2010
ANSR-59
ASCENDASCEND Fall 2010
96,214 ft
Quartzsite
Mar 27, 2010
ANSR-54
ASCENDASCEND Spring 2010
86,450 ft
Gila Bend
Nov 21, 2009
ANSR-52
ASCENDASCEND Fall 2009
93,538 ft
Gila Bend
Apr 4, 2009
ANSR-48
ASCENDASCEND Spring 2009
89,676 ft
Gila Bend
Nov 22, 2008
ANSR-47
ASCENDASCEND Fall 2008
95,867 ft
Goldwater Rng
Apr 5, 2008
ANSR-43
ASCENDASCEND Spring 2008
92,209 ft
Gila Bend
Nov 17, 2007
ANSR-41
ASCENDASCEND Fall 2007
99,229 ft
Maricopa
Apr 14, 2007
ANSR-37
ASCENDASCEND Spring 2007
92,834 ft
Freeman Exit I-8
Jan 27, 2007
ANSR-34
ASCENDASCEND Winter 2007
98,856 ft
Maricopa
Delayed from 11/6/2006 (weather).
Nov 19, 2005
ANSR-27
ASCEND #1 — Inaugural Flight
105,761 ft
Maricopa
The very first ASCEND flight.




_Ujn5WoVOOu.png?auto=compress%2Cformat&w=40&h=40&fit=fillmax&bg=fff&dpr=2)


_3u05Tpwasz.png?auto=compress%2Cformat&w=40&h=40&fit=fillmax&bg=fff&dpr=2)
{kind=link}
Comments