'''
The following code is inspired by:
User raja_961, Autonomous Lane-Keeping Car Using Raspberry Pi and OpenCV.
Instructables. URL: https://www.instructables.com/Autonomous-Lane-Keeping-Car-Using-Raspberry-Pi-and/
User Zhenya Liu, Karthik Goli, BT7, Lei Xia, Lane-Keeping RC car.
Hackster.io. URL: https://www.hackster.io/team-6/lane-keeping-rc-car-ebdd08
Team P.R.N.T: Paulina Arizpe-Romo, Tomi Kuye, Renee Wrysinski, Noah Villa, P.R.N.T. car.
Hackster.io. URL: https://www.hackster.io/p-r-n-t/p-r-n-t-car-22c60e
'''
# Team: Anthony Zhang, Ruiyang Wu, Helena Wang, Jacqueline Chung
#import various packages
import cv2
import numpy as np
import matplotlib.pyplot as plt
import math
import time
import os
import RPi.GPIO as GPIO
# --- Pin definitions ---
SPEED_PIN = 20
STEERING_PIN = 21
# --- image capture sizes ---.
frame_width = 160
frame_length = 120
# --- PWM freq ---
freq = 50
# --- PD constants ---
kp = 0.04
kd = 0.004
# --- Encoder thresholds ---
# These are interval between pulses in nanoseconds.
# max_speed: shorter interval than this means car going TOO FAST, so slow down
# min_speed: longer interval than this means car going TOO SLOW, so speed up
max_speed = 750_000_000
min_speed = 900_000_000
SPEED_STEP = 0.0001
# --- Stop sign ---
# Fraction of the frame that must be red to count as a stop sign.
bound_perc = 25.0
# --- Encoder driver path ---
interval_loc = "/sys/module/encoder_driver/parameters/encoder_interval"
# --- State variables that must live outside main loop ---
lastTime = 0
lastError = 0
current = 7.6 # current throttle duty cycle
max_throttle = 7.7
min_throttle = 7.50 # don't let `current` fall below this
ctr = 0
last_turn = 7.5
turn_smooth = 0.1 # higher val makes turn smoother but laggier
stop_cooldown_until = 0 # variables for red light stop
stop_count = 0
# --- Plotting buffers ---
errors = []
derivatives = []
proportions = []
# for visualization
frames = []
turns = []
speeds = []
# ====================== Computer vision functions ======================
def start_video():
video = cv2.VideoCapture(0)
#set frame resolutions
video.set(cv2.CAP_PROP_FRAME_WIDTH, frame_width)
video.set(cv2.CAP_PROP_FRAME_HEIGHT, frame_length)
#single frame buffer to minimize latency
video.set(cv2.CAP_PROP_BUFFERSIZE, 1)
return video
def convert_to_HSV(frame):
#seperates color from brightness
return cv2.cvtColor(frame, cv2.COLOR_BGR2HSV)
def detect_edges(hsv):
#bounds for where blue can be detected in hsv space
lower_blue = np.array([ 90, 50, 0], dtype="uint8")
upper_blue = np.array([150, 255, 255], dtype="uint8")
# 255 where pixels are blue, 0 elsewhere
mask = cv2.inRange(hsv, lower_blue, upper_blue)
#canny edge detection on mask
edges = cv2.Canny(mask, 50, 100)
return edges
ROI_TOP_FRAC = 0.60 # 0.5 = bottom half. Higher val means cutoff closer to the car.
def region_of_interest(edges):
#get dimensions of edges
height, width = edges.shape
mask = np.zeros_like(edges)
top_y = int(height * ROI_TOP_FRAC)
#rectangle covering lower portion of region, which is region that is kept
polygon = np.array([[
(0, height),
(0, top_y),
(width, top_y),
(width, height),
]], np.int32)
#fill polygon w/ white
cv2.fillPoly(mask, polygon, 255)
#keeps edges only inside polygon
return cv2.bitwise_and(edges, mask)
def detect_line_segments(cropped_edges):
#returns a list [x1,y1,x2,y2] segments
return cv2.HoughLinesP(cropped_edges, 1, np.pi/180, 10, np.array([]), minLineLength=5, maxLineGap=0)
def average_slope_intercept(frame, line_segments):
lane_lines = []
#if no line segments found
if line_segments is None:
#for debugging
print(" [asi] no segments")
return lane_lines
#split frame into left and right halves
height, width, _ = frame.shape
left_fit, right_fit = [], []
#diagnostic counters for debugging
n_total = 0; n_shallow = 0; n_left = 0; n_right = 0; n_dropped = 0
# iterate thru all hough segments
for line_segment in line_segments:
for x1, y1, x2, y2 in line_segment:
n_total += 1
# Treat vertical segments as having very steep slope
if x1 == x2:
slope = 1e6
intercept = x1 # store x in intercept slot for make_points
else:
#normal slope-intercept form
slope = (y2 - y1) / (x2 - x1)
intercept = y1 - slope * x1
# near horizontal lane lines
if abs(slope) < 0.2:
n_shallow += 1
continue
# Classify by midpoint side, not strict endpoint regions.
mid_x = (x1 + x2) / 2.0
#left lane fit
if mid_x < width / 2:
left_fit.append((slope, intercept))
n_left += 1
#right lane fit
else:
right_fit.append((slope, intercept))
n_right += 1
#debug print
print(f" [asi] total={n_total} shallow={n_shallow} "
f"L={n_left} R={n_right} dropped={n_dropped}")
#convert averaged lines into endpoint coordinates
if left_fit:
lane_lines.append(make_points(frame, np.average(left_fit, axis=0)))
if right_fit:
lane_lines.append(make_points(frame, np.average(right_fit, axis=0)))
return lane_lines
#helper function for average_slope_intercept
def make_points(frame, line):
height, width, _ = frame.shape
slope, intercept = line
#bottom of img to halfway up the frame
y1 = height
y2 = int(y1 / 2)
if abs(slope) > 1e3: # vertical: same x at both endpoints
x1 = x2 = int(intercept)
else:
#avoid division by zero on horizontal slope
if slope == 0: slope = 0.1
#solve for endpoints
x1 = int((y1 - intercept) / slope)
x2 = int((y2 - intercept) / slope)
return [[x1, y1, x2, y2]]
def display_lines(frame, lines, line_color=(0, 255, 0), line_width=6):
#blank frame
line_image = np.zeros_like(frame)
if lines is not None:
#draw each lane line
for line in lines:
for x1, y1, x2, y2 in line:
cv2.line(line_image, (x1, y1), (x2, y2), line_color, line_width)
#overlay lane onto original frame
return cv2.addWeighted(frame, 0.8, line_image, 1, 1)
def get_steering_angle(frame, lane_lines):
height, width, _ = frame.shape
if len(lane_lines) == 2:
#if both lanes visible, find midpoint between them
_, _, left_x2, _ = lane_lines[0][0]
_, _, right_x2, _ = lane_lines[1][0]
mid = int(width / 2)
#if pos offset, steer right. otherwise, steer left
x_offset = (left_x2 + right_x2) / 2 - mid
y_offset = int(height / 2)
elif len(lane_lines) == 1:
# follow the slope of the visible line.
x1, _, x2, _ = lane_lines[0][0]
x_offset = x2 - x1
y_offset = int(height / 2)
else:
#no lanes, so drive straight
x_offset = 0
y_offset = int(height / 2)
# convert calculated offsets into steering angle
angle_to_mid_radian = math.atan(x_offset / y_offset)
angle_to_mid_deg = int(angle_to_mid_radian * 180.0 / math.pi)
return angle_to_mid_deg + 90
def display_heading_line(frame, steering_angle, line_color=(0, 0, 255), line_width=5):
#overlay canvas
heading_image = np.zeros_like(frame)
height, width, _ = frame.shape
#convert steering angle to radians
rad = steering_angle / 180.0 * math.pi
x1 = int(width / 2); y1 = height
x2 = int(x1 - height / 2 / math.tan(rad)); y2 = int(height / 2)
#draw heading line
cv2.line(heading_image, (x1, y1), (x2, y2), line_color, line_width)
return cv2.addWeighted(frame, 0.8, heading_image, 1, 1)
def detect_red_pix(hsv):
h, w = hsv.shape[:2]
#convert percent threshold into pixel count
bound = (h * w) * (bound_perc / 100.0)
#need two ranges since red wraps around in hsv
lower_red1 = np.array([ 0, 50, 60], dtype="uint8")
upper_red1 = np.array([ 10, 255, 255], dtype="uint8")
lower_red2 = np.array([170, 50, 60], dtype="uint8")
upper_red2 = np.array([180, 255, 255], dtype="uint8")
#make masks for each range
mask1 = cv2.inRange(hsv, lower_red1, upper_red1)
mask2 = cv2.inRange(hsv, lower_red2, upper_red2)
#combine masks
mask = cv2.bitwise_or(mask1, mask2)
#count how many pixels of red there are
num_red_px = cv2.countNonZero(mask)
# Use this number to tune `bound_perc`:
# print(f"red_px={num_red_px} thresh={int(bound)}")
return num_red_px >= bound
# ====================== Speed encoder ======================
def get_speed_change():
#if encoder fails fsr, dont change speed
try:
with open(interval_loc, "r") as f:
interval = int(f.readline())
except Exception:
return 0.0
#if we are stalled, we want to increase speed
if interval == 0:
return SPEED_STEP
#short interval, means fast, so slow down
if interval <= max_speed: return -SPEED_STEP
#vice versa
elif interval >= min_speed: return SPEED_STEP
#else, hold current speed
else: return 0.0
# ====================== GPIO ======================
def GPIO_setup():
#set up GPIO pins
GPIO.setmode(GPIO.BCM)
GPIO.setup(SPEED_PIN, GPIO.OUT)
GPIO.setup(STEERING_PIN, GPIO.OUT)
def calibrate_esc(pwm):
#calibrate our esc before run, 7.3 is neutral for our esc
pwm.ChangeDutyCycle(10); time.sleep(2)
pwm.ChangeDutyCycle(5); time.sleep(2)
pwm.ChangeDutyCycle(7.3); time.sleep(2)
# ====================== Main loop!! ======================
GPIO_setup()
#set PWM freq to be 50 Hz
pwm_speed = GPIO.PWM(SPEED_PIN, freq)
pwm_steer = GPIO.PWM(STEERING_PIN, freq)
#start all PWM at neutral
pwm_speed.start(7.3)
pwm_steer.start(7.5)
#initial calibration
calibrate_esc(pwm_speed)
#start computer vision
video = start_video()
lastTime = time.time()
try:
while True:
# Drain any buffered frames so we always work on the freshest one
for _ in range(2):
video.grab()
#decode most recently grabbed frame
ret, frame = video.retrieve()
#if decode failed, skip and try again in next loop
if not ret or frame is None:
continue
frame = cv2.flip(frame, -1)
#convert camera output to hsv
hsv = convert_to_HSV(frame)
# ---- Stop sign handling ----
if detect_red_pix(hsv) and time.time() > stop_cooldown_until:
stop_count += 1
#second stop sign is end of course, so stop and exit loop
if stop_count >= 2:
print(f"Second stop sign stopping permanently.")
#reset back to neutral
pwm_speed.ChangeDutyCycle(7.3)
pwm_steer.ChangeDutyCycle(7.5)
break
#pause 5 seconds then continue on first red
print(f"Stop sign #{stop_count} pausing 5s")
pwm_speed.ChangeDutyCycle(7.3)
pwm_steer.ChangeDutyCycle(7.5)
time.sleep(5)
#makes sure red stop sign doesnt retrigger
stop_cooldown_until = time.time() + 15
#reset pd errors after pause
lastTime = time.time()
lastError = 0
# ---- Lane processing ----
# Pipeline: HSV mask -> Canny -> ROI -> Hough -> averaged lanes
edges = detect_edges(hsv)
roi = region_of_interest(edges)
line_segments = detect_line_segments(roi)
lane_lines = average_slope_intercept(frame, line_segments)
# How many lanes were found for debugging
num_lines = len(lane_lines)
# Visualize lanes and heading direction for debugging
lane_image = display_lines(frame, lane_lines)
steering_angle = get_steering_angle(frame, lane_lines)
heading_image = display_heading_line(lane_image, steering_angle)
#save imgs for debugging
cv2.imwrite("roi.jpg", roi)
cv2.imwrite("blue_full.jpg", cv2.inRange(hsv, np.array([90,50,0]), np.array([150,255,255])))
cv2.imwrite("heading_image.jpg", heading_image)
#allows esc key to break loop
if cv2.waitKey(1) == 27:
break
# ---- PD steering ----
now = time.time()
dt = now - lastTime
if dt <= 0:
dt = 1e-3 # guard against the first frame and clock weirdness
#how far heading is off from straight
error = steering_angle - 90
base_turn = 7.5
#pd terms for PID!!
proportional = kp * error
derivative = kd * (error - lastError) / dt
turn = base_turn + proportional + derivative
# Servo safety clamp (centered at 7.5)
turn = base_turn + proportional + derivative
# Servo safety clamp (centered at 7.5)
turn = base_turn + proportional + derivative
# Hard limits prevent servo from moving past its mechanical range
turn = max(5.0, min(10.0, turn))
pwm_steer.ChangeDutyCycle(turn)
# ---- Speed update ----
nl_raw = -1
# Only update speed every 8 frames
if ctr % 8 == 0:
#read encoder interval and print for debug
try:
with open(interval_loc, "r") as f:
nl_raw = int(f.readline())
except Exception:
pass
#closed-loop step towards target speed
new_speed = current + get_speed_change()
# make sure speed isnt too fast or slow
new_speed = max(min_throttle, min(max_throttle, new_speed))
pwm_speed.ChangeDutyCycle(new_speed)
current = new_speed
#print error for debugging
print(f"f={ctr:4d} lines={num_lines} err={error:+6.1f} "
f"turn={turn:5.2f} curr={current:5.3f} nl={nl_raw}")
# ---- Logging ----
#append everything so we can plot in the end
errors.append(error)
derivatives.append(derivative)
proportions.append(proportional)
#more plots
turns.append(turn)
speeds.append(current)
frames.append(ctr)
ctr += 1
#update error for PID
lastError = error
lastTime = now
#brief sleep in between loop
time.sleep(0.025)
finally:
# stop the car's movements
try:
#reset everything to neutral
pwm_speed.ChangeDutyCycle(7.3)
pwm_steer.ChangeDutyCycle(7.5)
#stop PWM signal
pwm_speed.stop()
pwm_steer.stop()
except Exception:
pass
#release GPIOs
GPIO.cleanup()
#release camera
video.release()
#close OpenCV windows
cv2.destroyAllWindows()
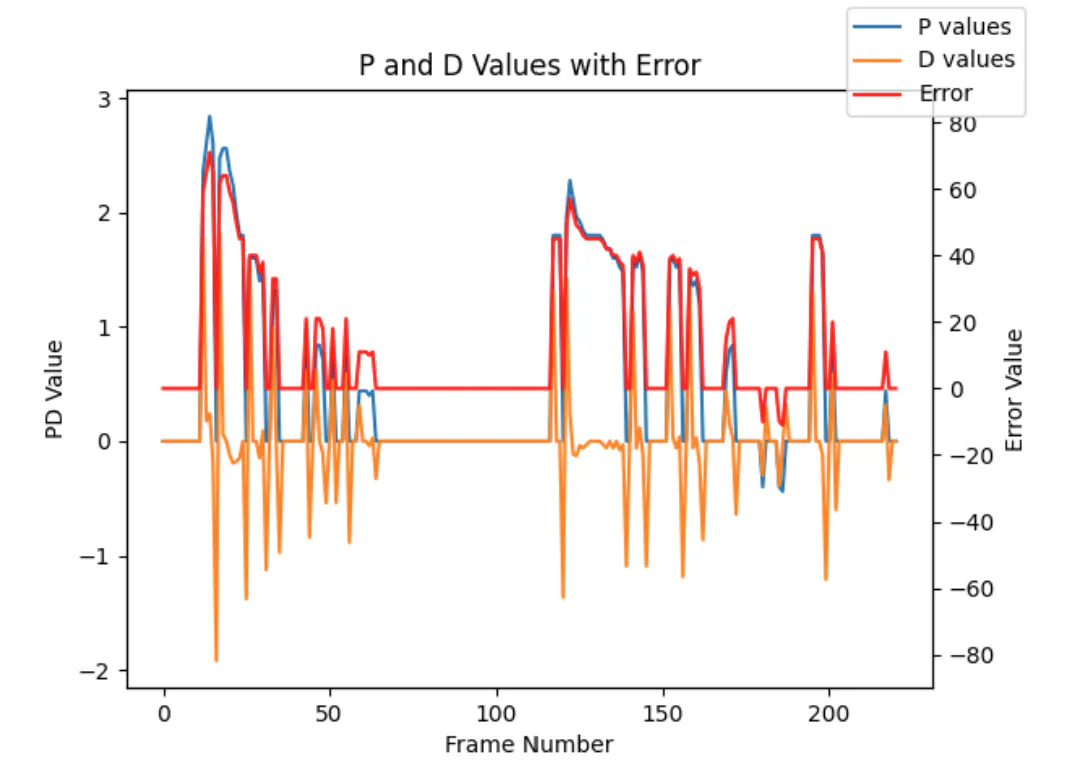
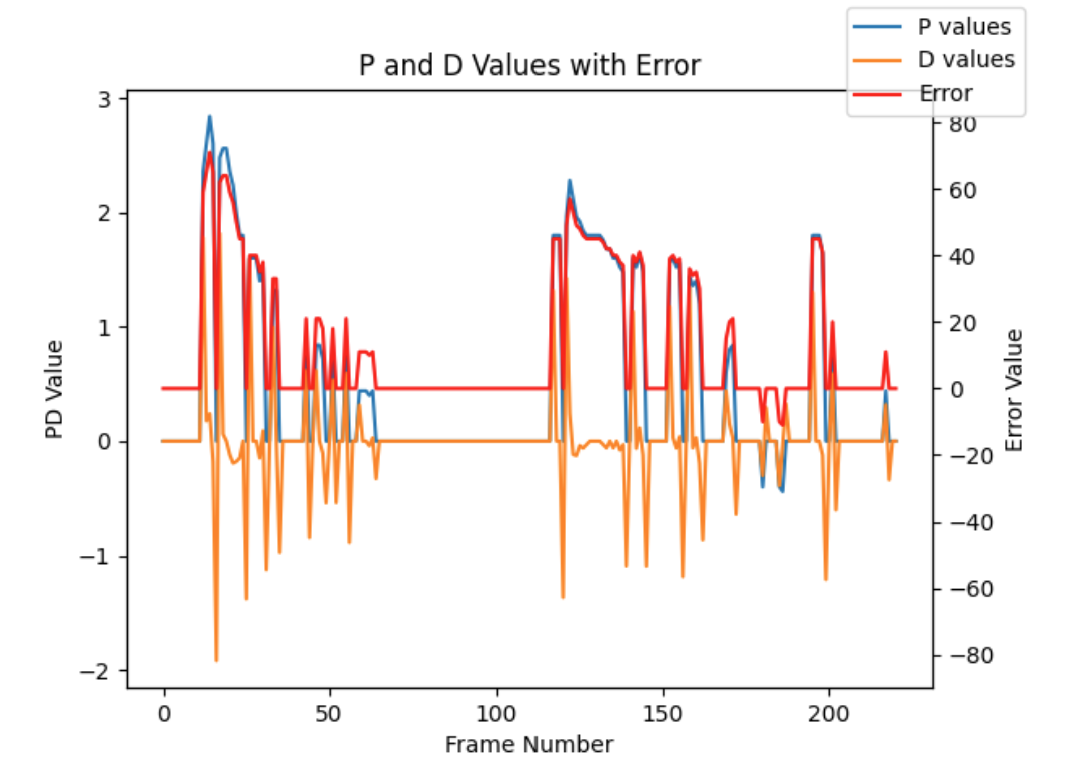
# P / D / Error plot
fig, ax1 = plt.subplots()
t_ax = np.arange(len(proportions))
ax1.plot(t_ax, proportions, label="P values")
ax1.plot(t_ax, derivatives, label="D values")
#share x axis but separate y axis
ax2 = ax1.twinx()
ax2.plot(t_ax, errors, label="Error", color='red')
ax1.set_xlabel("Frame Number"); ax1.set_ylabel("PD Value")
#error bound to 90 degrees
ax2.set_ylim(-90, 90); ax2.set_ylabel("Error Value")
plt.title("P and D Values with Error"); fig.legend()
#save plot
plt.savefig("PD_vals.png")
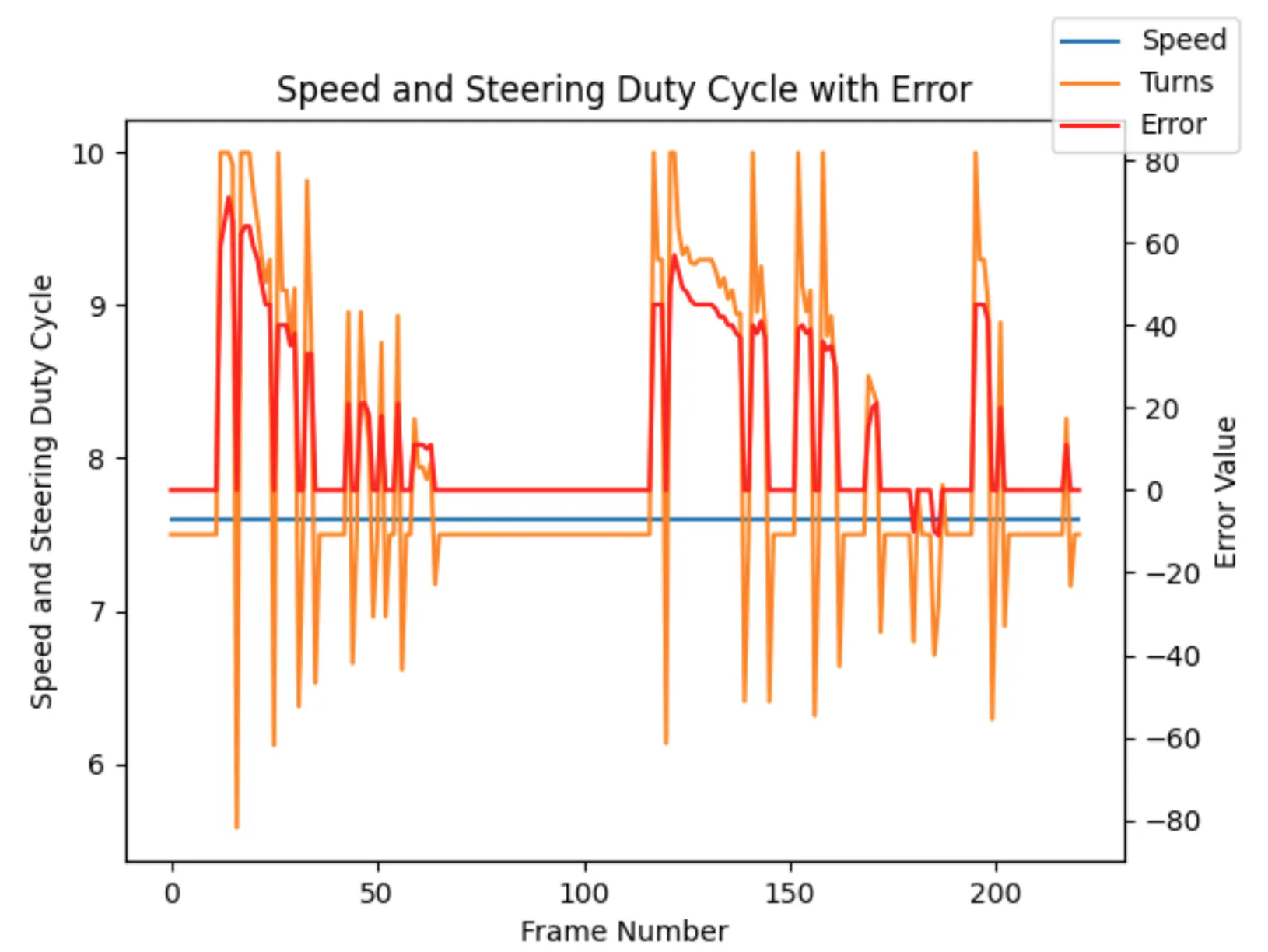
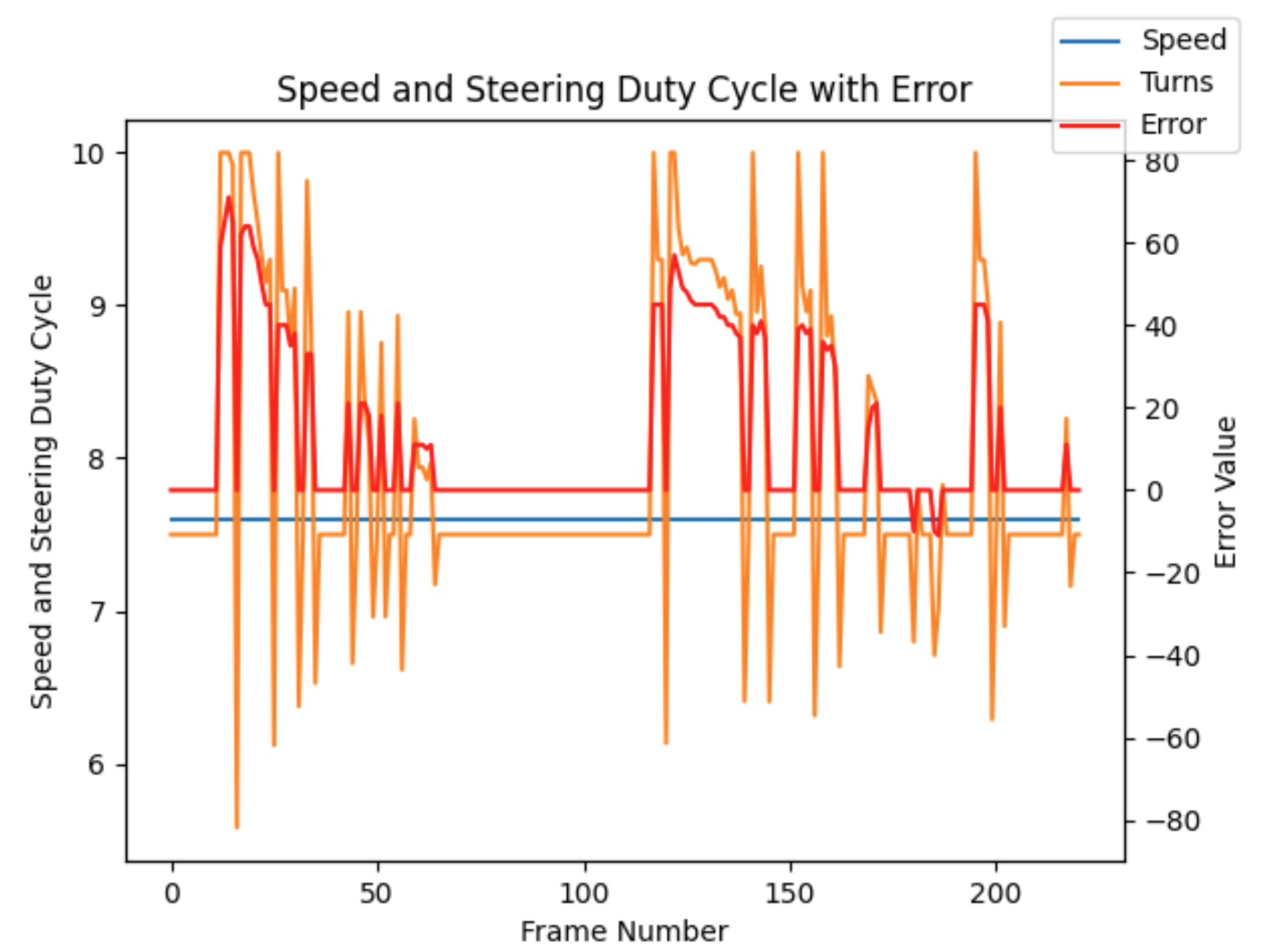
# Speed / Turn / Error plot
fig, ax1 = plt.subplots()
t_ax = np.arange(len(speeds))
ax1.plot(t_ax, speeds, label="Speed")
ax1.plot(t_ax, turns, label="Turns")
#share x axis but separate y axis
ax2 = ax1.twinx()
ax2.plot(t_ax, errors, label="Error", color='red')
ax1.set_xlabel("Frame Number")
ax1.set_ylabel("Speed and Steering Duty Cycle")
#bound errors to be 90 degrees
ax2.set_ylim(-90, 90); ax2.set_ylabel("Error Value")
plt.title("Speed and Steering Duty Cycle with Error"); fig.legend()
#save plot
plt.savefig("Movement_vals.png")






















{kind=link}
{kind=link}
{kind=link}
Comments