


Hardware components | ||||||
_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff) |
| × | 1 | |||
|
| × | 1 | |||
 |
| × | 1 | |||
|
| × | 1 | |||
 |
| × | 1 | |||
|
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
| × | 2 | ||||
| × | 2 | ||||
 |
| × | 1 | |||
|
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
| × | 2 | ||||
| × | 2 | ||||
| × | 2 | ||||
| × | 2 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
 |
| × | 1 | |||
|
| × | 1 | |||
| × | 7 | ||||
| × | 7 | ||||
| × | 1 | ||||
| × | 1 | ||||
 |
| × | 1 | |||
|
| × | 1 | |||
 |
| × | 1 | |||
|
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
 |
| × | 1 | |||
|
| × | 1 | |||
Software apps and online services | ||||||
 |
| |||||
|
| |||||
| ||||||
| ||||||
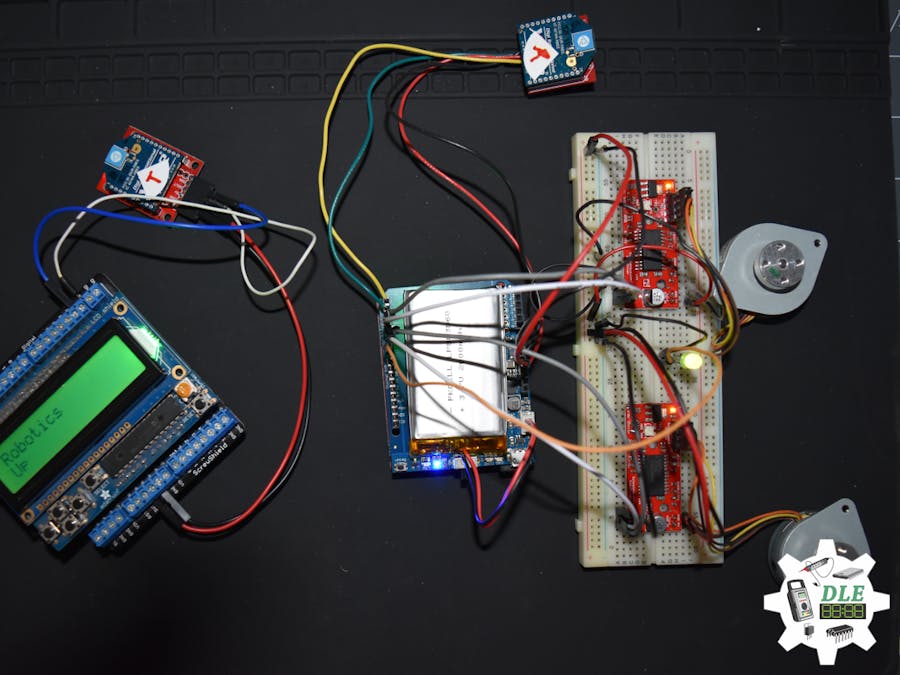
http://www.donluc.com/?p=2093
#DonLuc #Robotics #XBee #Electronics #Consultant #Vlog #Aphasia #Microcontrollers #SparkFun #Fritzing #Programming #Adafruit #Arduino
1 x Arduino UNO - R3
1 x Arduino UNO - SparkFun RedBoard
1 x ProtoScrewShield
1 x Adafruit RGB LCD Shield 16×2 Character Display
2 x XBee S1
1 x SparkFun XBee Explorer Regulated
1 x Breakout Board for XBee Module
2 x EasyDriver
2 x Small Stepper
1 x Adafruit PowerBoost 500 Shield
1 x Lithium Ion Battery - 2Ah
1 x LED Green
7 x Jumper Wires 3in M/M
13 x Jumper Wires 6in M/M
1 x Full-Size Breadboard
1 x SparkFun XBee Explorer USB
1 x DIGI XCTU Software
1 x SparkFun USB Mini-B Cable
1 x SparkFun Cerberus USB Cable
TX0 - Digital 1
RX0 - Digital 0
VIN - +5V
GND - GND
XBee S1: Transmitter
CH Channel: C
PAN Id: 3333
SH Serial Number: 13A200
SL Serial Number: 40717A1F
CE Coordinator: Coordinator
BD: 9600
getEEPROM.ino
getProcessMessage.ino
getSwitch.ino
setup.ino
LEG - Digital 6
SP1 - Digital 3
DI1 - Digital 2
SP2 - Digital 5
DI2 - Digital 4
TX0 - Digital 1
RX0 - Digital 0
VIN - +3.3V
GND - GND
XBee S1: Receiver
CH Channel: C
PAN Id: 3333
SH Serial Number: 13A200
SL Serial Number: 4076E2C5
CE Coordinator: End Device
BD: 9600
getEEPROM.ino
getProcessMessage.ino
getStepper.ino
getSwitch.ino
setup.ino
Technology Experience- Research & Development (R & D)
- Desktop Applications (Windows, OSX, Linux, Multi-OS, Multi-Tier, etc...)
- Mobile Applications (Android, iOS, Blackberry, Windows Mobile, Windows CE, etc...)
- Web Applications (LAMP, Scripting, Java, ASP, ASP.NET, RoR, Wakanda, etc...)
- Social Media Programming & Integration (Facebook, Twitter, YouTube, Pinterest, etc...)
- Content Management Systems (Wordpress, Drupal, Joomla, Moodle, etc...)
- Bulletin Boards (phpBB, SMF, Vanilla, jobberBase, etc...)
- eCommerce (WooCommerce, OSCommerce, ZenCart, PayPal Shopping Cart, etc...)
- DOS, Windows, OSX, Linux, iOS, Android, Multi-OS
- Linux-Apache-PHP-MySQL
- Robotics
- Arduino
- Raspberry Pi
- Espressif
http://www.donluc.com/?page_id=6
Aphasiahttp://www.donluc.com/?page_id=2149
J. Luc Paquin – Curriculum Vitaehttp://www.donluc.com/DLHackster/LucPaquinCVEngMk2020a.pdf
Web:http://www.jlpconsultants.com/
Web:http://www.donluc.com/DLHackster/
Web:https://www.hackster.io/neosteam-labs
Facebook:https://www.facebook.com/neosteam.labs.9/
YouTube:https://www.youtube.com/channel/UC5eRjrGn1CqkkGfZy0jxEdA
Twitter:https://twitter.com/labs_steam
Pinterest:https://www.pinterest.com/NeoSteamLabs/
Don Luc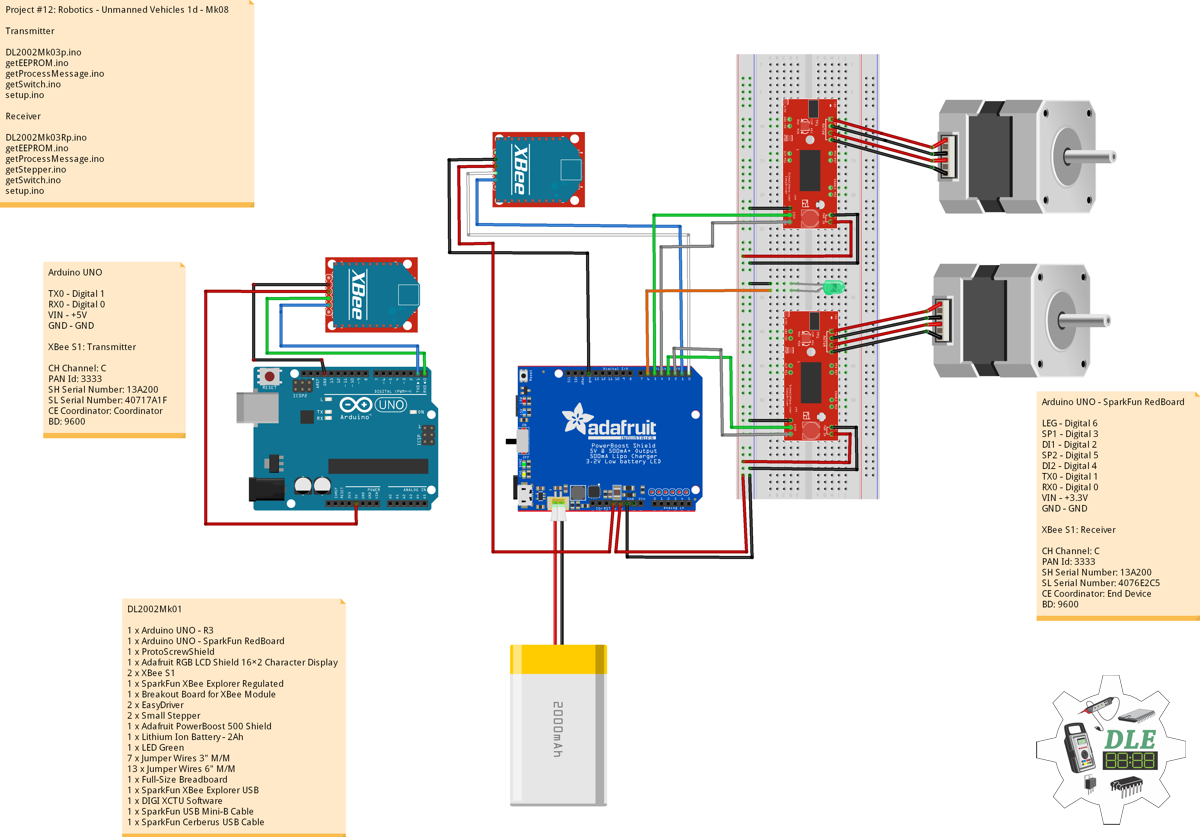





_3u05Tpwasz.png?auto=compress%2Cformat&w=40&h=40&fit=fillmax&bg=fff&dpr=2)
{kind=link}
Comments