


Hardware components | ||||||
| × | 1 | ||||
_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff) |
| × | 1 | |||
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 2 | ||||
 |
| × | 2 | |||
 |
| × | 2 | |||
 |
| × | 2 | |||
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
 |
| × | 1 | |||
| × | 1 | ||||
 |
| × | 1 | |||
| × | 17 | ||||
| × | 31 | ||||
 |
| × | 1 | |||
 |
| × | 1 | |||
Software apps and online services | ||||||
 |
| |||||
http://www.donluc.com/?p=2042
SparkFun 5-Way Tactile Switch BreakoutThis 5-way tactile switch (up, down, left, right, and center click) allows for joystick-like control in a very small package.
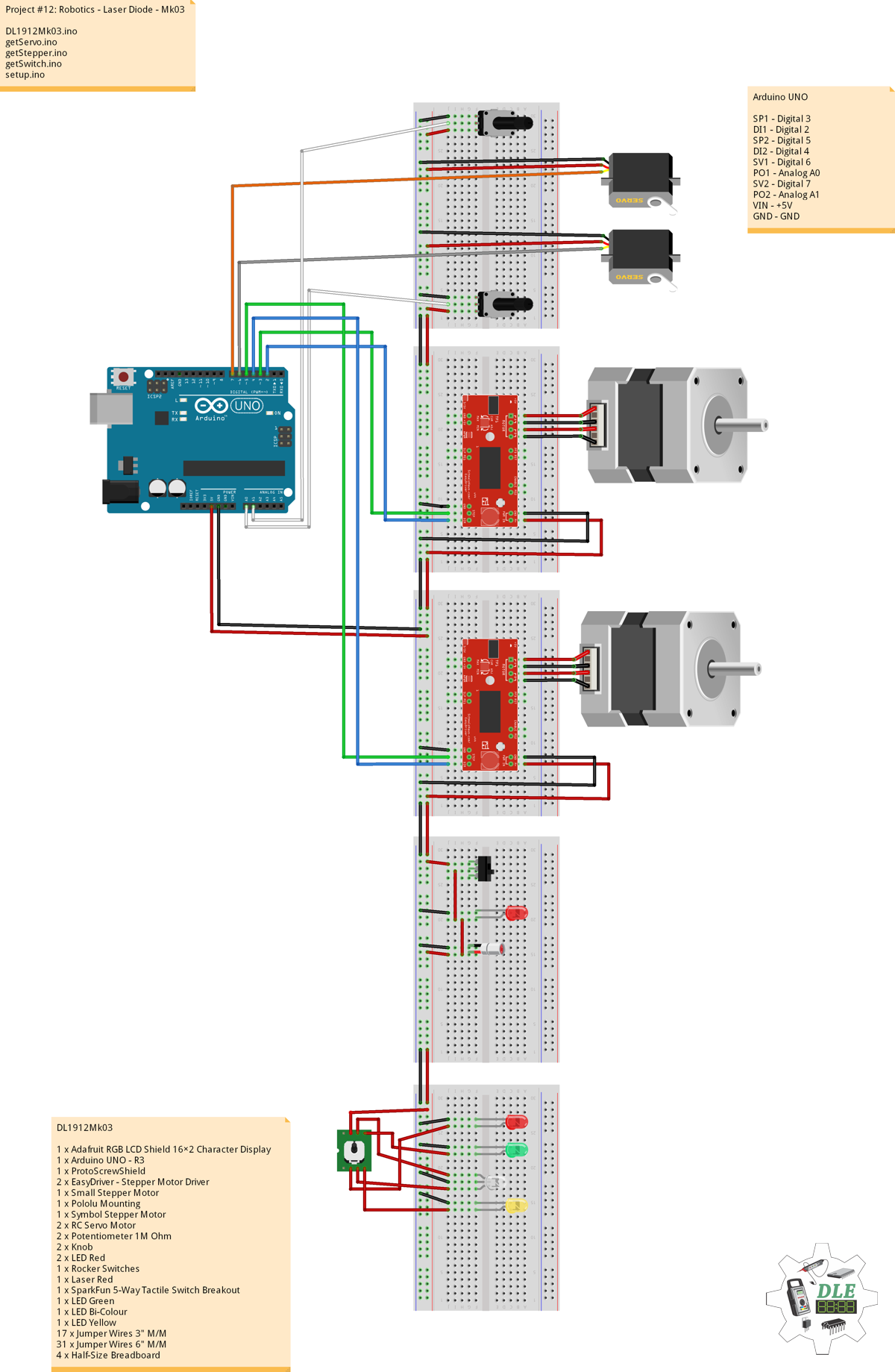
1 x Adafruit RGB LCD Shield 16×2 Character Display
1 x Arduino UNO - R3
1 x ProtoScrewShield
2 x EasyDriver - Stepper Motor Driver
1 x Small Stepper Motor
1 x Pololu Mounting
1 x Symbol Stepper Motor
2 x RC Servo Motor
2 x Potentiometer 1 M Ohm
2 x Knob
2 x LED Red
1 x Rocker Switches
1 x Laser Diode Red
1 x SparkFun 5-Way Tactile Switch Breakout
1 x LED Green
1 x LED Bi-Colour
1 x LED Yellow
17 x Jumper Wires 3 in M/M
31 x Jumper Wires 6 in M/M
4 x Half-Size Breadboard
1 x SparkFun Cerberus USB Cable
SP1 - Digital 3
DI1 - Digital 2
SP2 - Digital 5
DI2 - Digital 4
SV1 - Digital 6
PO1 - Analog A0
SV2 - Digital 7
PO2 - Analog A1
VIN - +5V
GND - GND
- Research & Development (R & D)
- Desktop Applications (Windows, OSX, Linux, Multi-OS, Multi-Tier, etc...)
- Mobile Applications (Android, iOS, Blackberry, Windows Mobile, Windows CE, etc...)
- Web Applications (LAMP, Scripting, Java, ASP, ASP.NET, RoR, Wakanda, etc...)
- Social Media Programming & Integration (Facebook, Twitter, YouTube, Pinterest, etc...)
- Content Management Systems (Wordpress, Drupal, Joomla, Moodle, etc...)
- Bulletin Boards (phpBB, SMF, Vanilla, jobberBase, etc...)
- eCommerce (WooCommerce, OSCommerce, ZenCart, PayPal Shopping Cart, etc...)
- DOS, Windows, OSX, Linux, iOS, Android, Multi-OS
- Linux-Apache-PHP-MySQL
- Robotics
- Arduino
- Raspberry Pi
- Espressif
http://www.donluc.com/?page_id=6
Aphasiahttp://www.donluc.com/?page_id=2149
J. Luc Paquin – Curriculum Vitaehttp://www.donluc.com/DLHackster/LucPaquinCVEngMk2020a.pdf
Web:http://www.jlpconsultants.com/
Web:http://www.donluc.com/DLHackster/
Web:https://www.hackster.io/neosteam-labs
Facebook:https://www.facebook.com/neosteam.labs.9/
YouTube:https://www.youtube.com/channel/UC5eRjrGn1CqkkGfZy0jxEdA
Twitter:https://twitter.com/labs_steam
Pinterest:https://www.pinterest.com/NeoSteamLabs/
Don Luc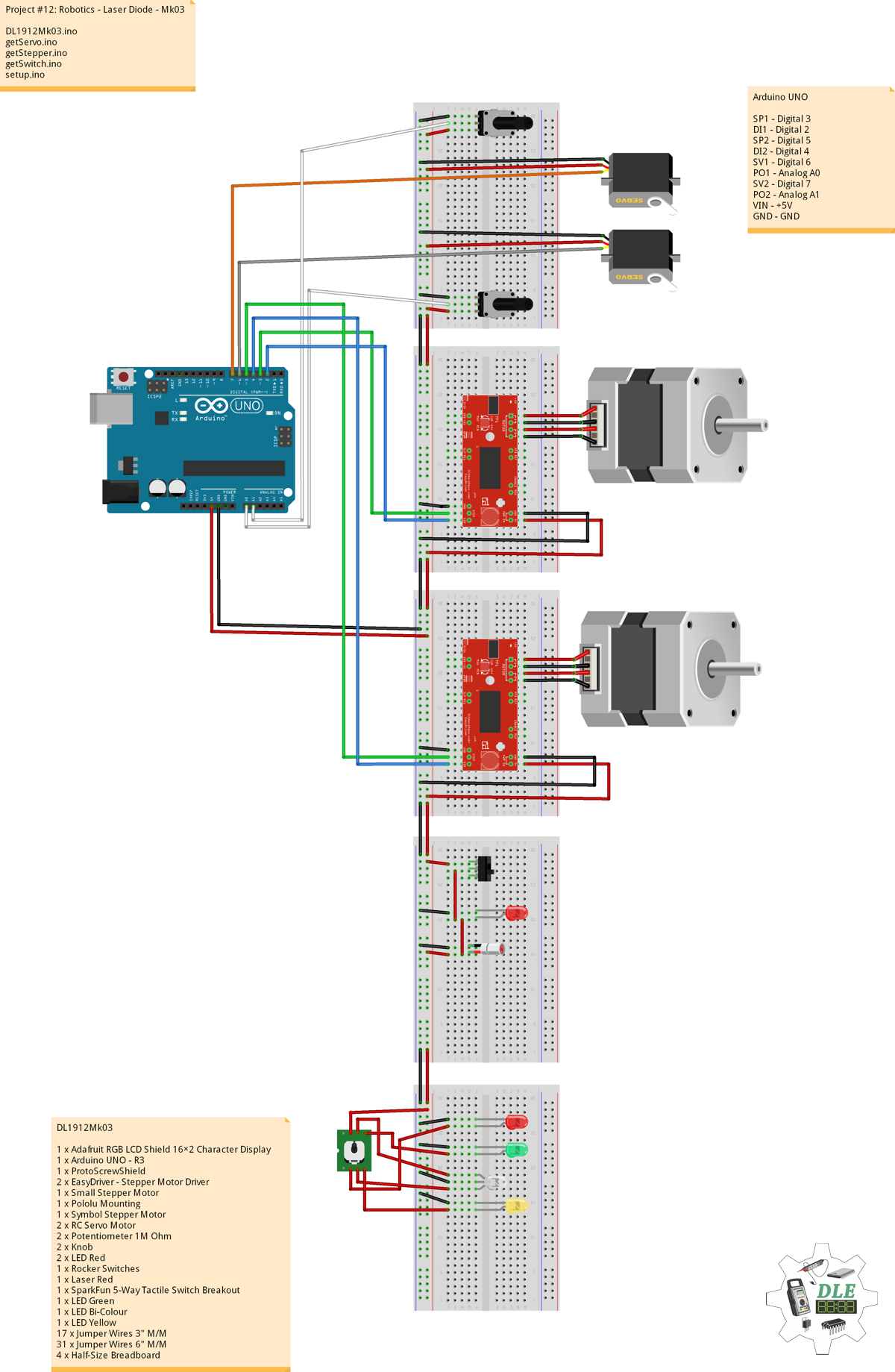





_3u05Tpwasz.png?auto=compress%2Cformat&w=40&h=40&fit=fillmax&bg=fff&dpr=2)
{kind=link}
Comments