


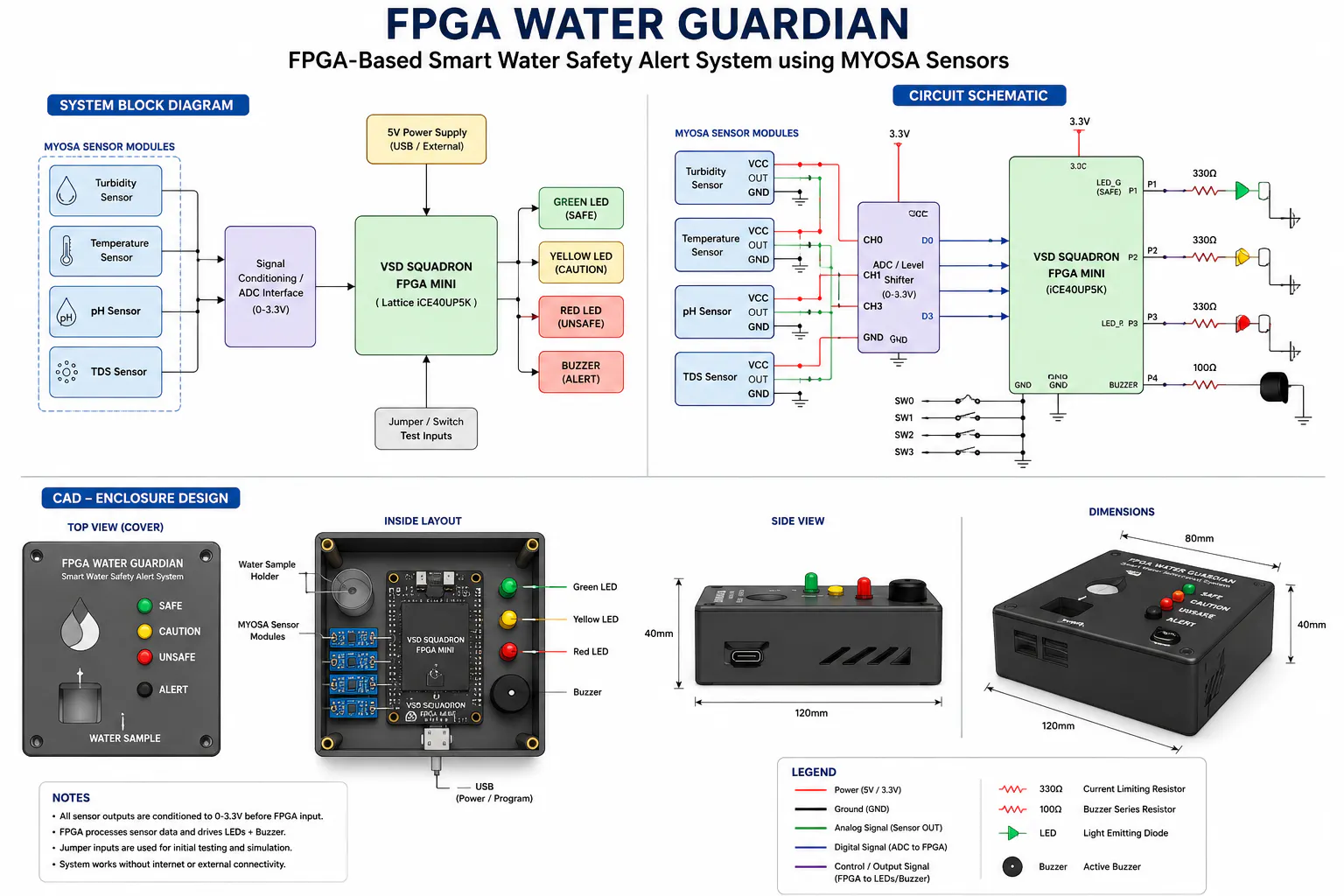
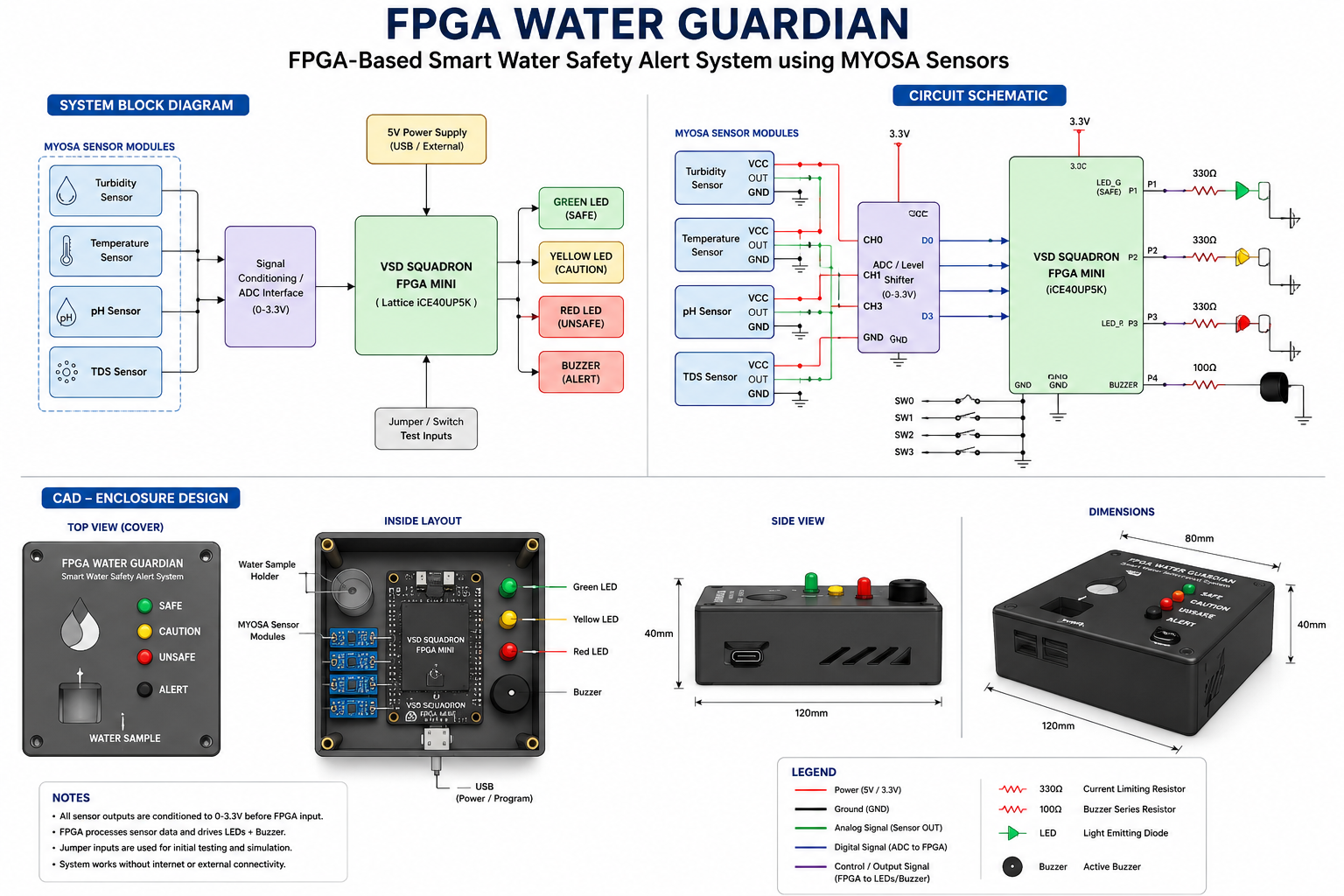
My project is about building a low-cost FPGA-based smart water safety alert system. The system uses MYOSA sensor modules as the sensing front-end and the VSD Squadron FPGA Mini board as the main processing unit. It is designed to classify water condition into three simple states: Safe, Caution, and Unsafe.
I decided to make this project because safe drinking water is still a serious issue in many rural and low-resource areas. Laboratory testing is accurate, but it is slow, costly, and not always available. I wanted to build a simple local alert system that can give quick and easy-to-understand warnings using LEDs and a buzzer, without needing the internet, a mobile app, or technical knowledge.
The system works by taking sensor signals related to water condition, such as turbidity, temperature, or other water-quality indicators. These signals are given to the FPGA as warning inputs. The FPGA logic checks how many conditions are abnormal and updates a bio-inspired risk score. If the risk is low, the green LED turns ON. If the risk is medium, the yellow LED turns ON. If the risk becomes high, the red LED and buzzer are activated.
The creative part of this project is the bio-inspired risk accumulator. Instead of instantly triggering an unsafe alert from one noisy sensor reading, the FPGA slowly increases the risk when abnormal readings continue and slowly decreases the risk when the condition becomes normal again. This makes the system more stable and reduces false alarms.
For the first prototype, I will test the FPGA logic using jumper or switch inputs. After confirming the logic, I will connect MYOSA sensor modules through proper signal conditioning or ADC interfacing. The final demo will show Safe, Caution, and Unsafe conditions using LEDs, buzzer output, photos of the setup, screenshots of the FPGA code, and a short working video.








{kind=link}
Comments