

Hardware components | ||||||
 |
| × | 1 | |||
| × | 1 | ||||
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
 |
| × | 1 | |||
Software apps and online services | ||||||
 |
| |||||
We need to weld the correct things, so follow along. The current interest in dubstep was growing, and I was ready to spend 40€ on one expression pedal for my boss synthesizer when I remembered I was an electronics nerd.
Then science occurred.
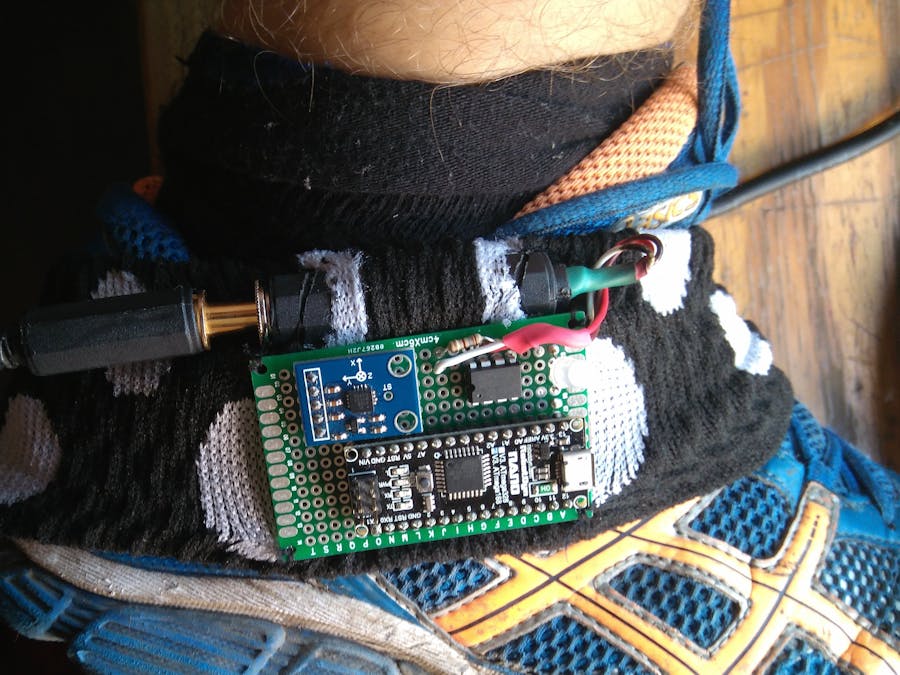
At first, I thought about drilling a shoe and gluing the electronics inside, but I did not have a pair of shoes to spare. So, I ended up purchasing a hair band and stitching thread.
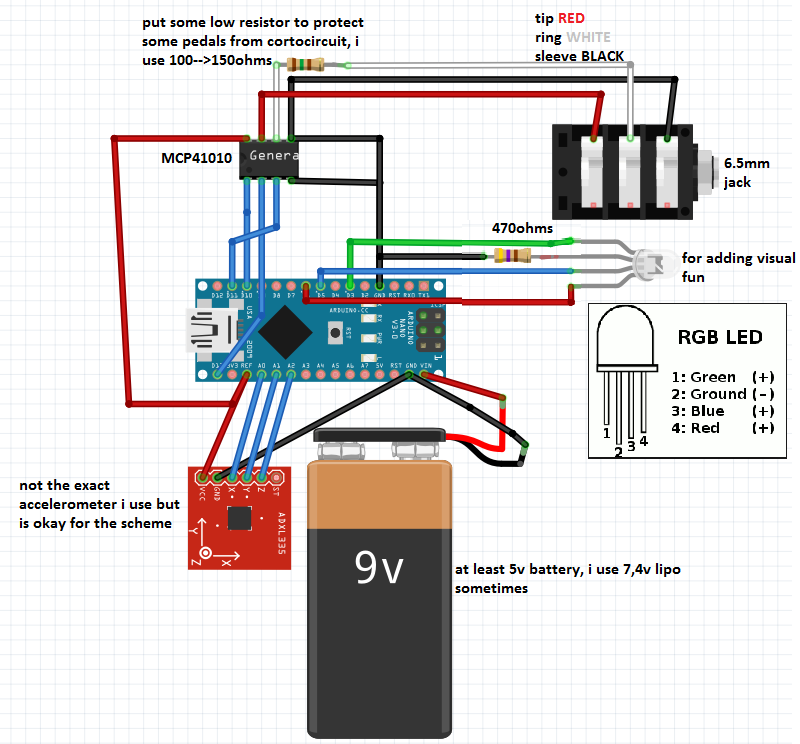
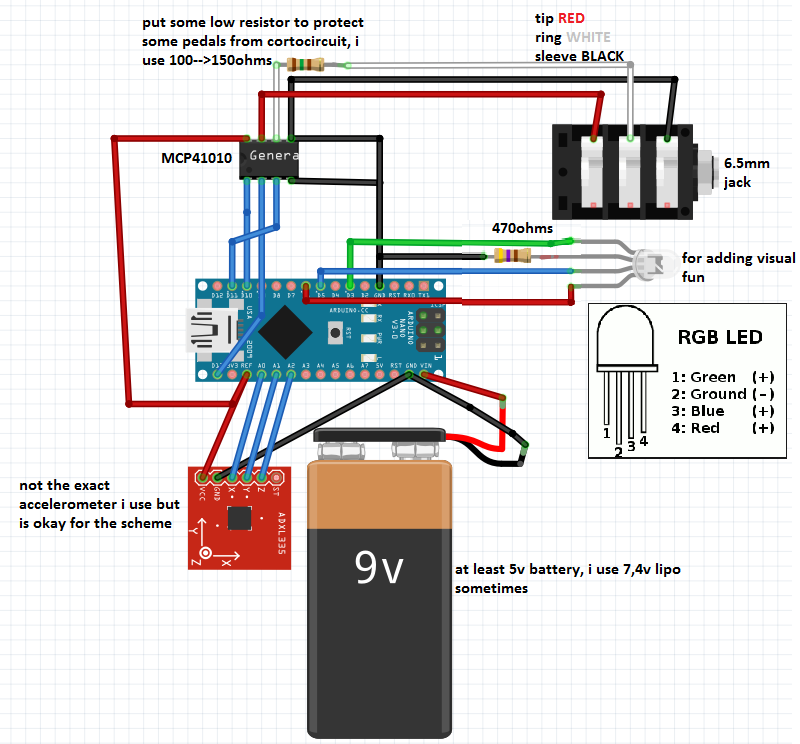
First steps with the MPC digital potentiometers family:We have a lot of types to choose from, but I picked this one - the MPC41010.
- MPC41010: single potentiometer, 10k ohm
- MPC41050: single potentiometer, 50k ohm
- MPC41100: single potentiometer, 100k ohm
- MCP42010: two independent potentiometers, 10k ohm
- MCP42050: two independent potentiometers, 50k ohm
- MCP42100: two independent potentiometers, 100k ohm
More things about them here. Important things that you need to know for hacking this device:
- You can do similar things with other digital potentiometers. (like the COM-10613, more info)
- The resistance is 0 to 10k ohms divided in 255 steps with each step of 39 ohms. (MATH!)
- Serial communication: just use
#include <SPI.h>.
I love the smell of recycled cardboard in the morning.
What I learned with the prototype:
- When the device is reset, the human needs to set the flat and the top values for adjusting the range of movement.
- It would be nice to implement a function that chooses between the axis which had the wider range of variation. This would be useful so that you don't have to mind the position of the accelerometer; you could put it in upside-down, on the bass top, on your wrist, etc.
- Maybe I need to implement a logarithmic behaviour for the resistance values.
- I need to take care of the 0 level because it is highly instable.
Keep in mind I am poor. So for 4€, I bought the components (couple of male jack endings and 1 meter of cable).
We need to weld the correct things, so follow the scheme and use some hot-shrink tube to do a fine job.




_3u05Tpwasz.png?auto=compress%2Cformat&w=40&h=40&fit=fillmax&bg=fff&dpr=2)
{kind=link}
Comments