#include "Adafruit_Thermal.h"
#include <SD.h>
#include <SPI.h>
#include "SoftwareSerial.h"
#include <Adafruit_NeoPixel.h>
#include <Entropy.h>
//Declare pin functions on Redboard
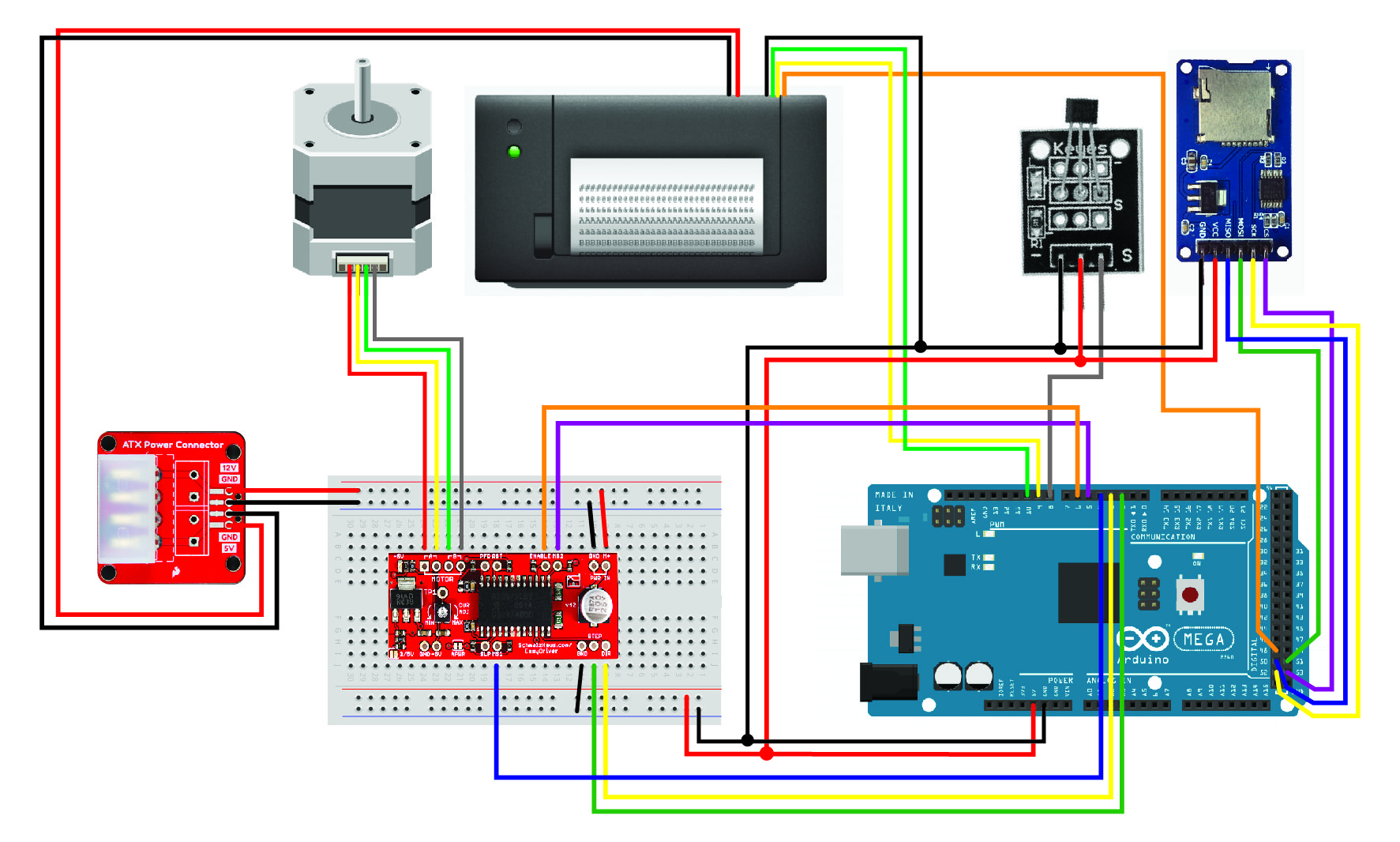
#define stp 2
#define dir 3
#define MS1 4
#define MS2 5
#define EN 6 // stp, dir, MS1, MS2, EN are all for the Easy Driver
#define LED_PIN 7 // Optional, be sure to comment this outt if you aren't going to use LEDS
#define LED_COUNT 24
#define HOME_SENSOR 8 //This is the pin for the hall effect sensor
#define TX_PIN 9 // Arduino transmit YELLOW WIRE labeled RX on printer
#define RX_PIN 10 // Arduino receive GREEN WIRE labeled TX on printer
#define BUTTON_PIN 11 // Only relavent if you wish to operate the machine without the computer attached
#define SD_Pin 53
Adafruit_NeoPixel strip(LED_COUNT, LED_PIN, NEO_GRBW + NEO_KHZ800); // declare LEDS
SoftwareSerial mySerial(RX_PIN, TX_PIN); // Declare SoftwareSerial obj first
Adafruit_Thermal printer(&mySerial, 48); // Pass addr to printer constructor
// Then see setup() function regarding serial & printer begin() calls.
//Declare variables for functions
char user_input;
int x;
inline void initSD() {
pinMode(SD_Pin, OUTPUT);
if (!SD.begin(SD_Pin)) {
Serial.println("SD Error");
} else {
Serial.println("SD Ok");
}
}
//****************************************************************************
//****************************************************************************
boolean lastButtonState = HIGH;
unsigned long currentButtonTime = 0, lastButtonTime = 0, ButtonCheckTime = 20;
//****************************************************************************
//****************************************************************************
void setup() {
initSD(); //Initialize the SD card
Entropy.initialize(); //Initialize the Entropy library
pinMode(stp, OUTPUT);
pinMode(dir, OUTPUT);
pinMode(MS1, OUTPUT);
pinMode(MS2, OUTPUT);
pinMode(EN, OUTPUT); //Set the pinmodes for the easydriver
pinMode(HOME_SENSOR, INPUT); // Set the pinmode for the hall effect sensor
pinMode(BUTTON_PIN, INPUT_PULLUP);
Serial.begin(9600); //Open Serial connection for debugging
Serial.println("Begin motor control");
strip.begin(); // INITIALIZE NeoPixel strip object (REQUIRED)
strip.show(); // Turn OFF all pixels ASAP
strip.setBrightness(50); // Set BRIGHTNESS to about 1/5 (max = 255)
mySerial.begin(19200); // Initialize SoftwareSerial
printer.begin(); // Init printer (same regardless of serial type)
FindHome(); // Go to the "Top of the deck" at startup
}
//****************************************************************************
//****************************************************************************
void loop(){
currentButtonTime = millis();
digitalWrite(EN, LOW); //Pull enable pin low to allow motor control
if ( currentButtonTime - lastButtonTime > ButtonCheckTime ) {
boolean buttonState = digitalRead(BUTTON_PIN);
if (buttonState == LOW && lastButtonState == HIGH) {
PickACard();
CardOfTheDay();
colorWipe(strip.Color(0, 0, 0, 0), 0); // OFF
FindHome();
}
lastButtonState = buttonState;
}
while(Serial.available()){
user_input = Serial.read(); //Read user input and trigger appropriate function
digitalWrite(EN, LOW); //Pull enable pin low to allow motor control
if (user_input == '1'){
Serial.println();
Serial.print("Your card of the day is... ");
PickACard();
CardOfTheDay();
colorWipe(strip.Color(0, 0, 0, 0), 0); // OFF
FindHome();
}
else if (user_input == '2'){
Serial.println();
Serial.print("Your past was... ");
PickACard();
Past();
colorWipe(strip.Color(0, 0, 0, 0), 0); // OFF
Reset();
Serial.print("Your present is... ");
PickACard();
Present();
colorWipe(strip.Color(0, 0, 0, 0), 0); // OFF
Reset();
Serial.print("Your future will be... ");
PickACard();
Future();
colorWipe(strip.Color(0, 0, 0, 0), 0); // OFF
FindHome();
}
else if (user_input == '3'){
Serial.println();
Serial.print("Your relationship card is... ");
PickACard();
Relationship();
colorWipe(strip.Color(0, 0, 0, 0), 0); // OFF
FindHome();
}
else if (user_input == '4'){
Serial.println();
Serial.print("Your vocational card is... ");
PickACard();
Vocation();
colorWipe(strip.Color(0, 0, 0, 0), 0); // OFF
FindHome();
}
}
}
//****************************************************************************
//****************************************************************************
void FindHome(){
digitalWrite(dir, LOW); //Pull direction pin low to move "forward"
digitalWrite(MS1, HIGH);
digitalWrite(MS2, HIGH); //Pull MS1, and MS2 high to set logic to 1/8th microstep resolution
Serial.println("Searching for home...");
for(x= 0; x< 500 ; x++) //Loop forward enough times to stop a false home
{
digitalWrite(stp,HIGH); //Trigger one step forward
delayMicroseconds(1275);
digitalWrite(stp,LOW); //Pull step pin low so it can be triggered again
delayMicroseconds(1275);
}
while(digitalRead(HOME_SENSOR)){
digitalWrite(stp,HIGH); //Trigger one step forward
delayMicroseconds(1275);
digitalWrite(stp,LOW); //Pull step pin low so it can be triggered again
delayMicroseconds(1275);
}
Serial.println("Home Found");
Serial.println();
Serial.println("What type of reading would you like?");
Serial.println();
Serial.println("1: Card of the day");
Serial.println("2: Past, Present, Future");
Serial.println("3: Love and relationships");
Serial.println("4: Career / Vocation");
}
//****************************************************************************
void Reset(){
digitalWrite(dir, LOW); //Pull direction pin low to move "forward"
digitalWrite(MS1, HIGH); //Pull MS1, and MS2 high to set logic to 1/8th microstep resolution
digitalWrite(MS2, HIGH);
for(x= 0; x< 500 ; x++) //Loop forward enough times to stop a false home
{
digitalWrite(stp,HIGH); //Trigger one step forward
delayMicroseconds(1275);
digitalWrite(stp,LOW); //Pull step pin low so it can be triggered again
delayMicroseconds(1275);
}
while(digitalRead(HOME_SENSOR)){
digitalWrite(stp,HIGH); //Trigger one step forward
delayMicroseconds(1275);
digitalWrite(stp,LOW); //Pull step pin low so it can be triggered again
delayMicroseconds(1275);
}
}
//****************************************************************************
void CardOfTheDay(){
printer.feed(1);
printer.boldOn();
printer.justify('C');
printer.setSize('L');
printer.upsideDownOn();
printer.println(F("CARD OF THE DAY"));
printer.feed(4);
printer.upsideDownOff();
printer.sleep(); // Tell printer to sleep
delay(3000L); // Sleep for 3 seconds
printer.wake(); // MUST wake() before printing again, even if reset
printer.setDefault(); // Restore printer to defaults
}
//****************************************************************************
void Past(){
printer.feed(1);
printer.boldOn();
printer.justify('C');
printer.setSize('L');
printer.upsideDownOn();
printer.println(F("PAST"));
printer.feed(4);
printer.upsideDownOff();
printer.sleep(); // Tell printer to sleep
delay(3000L); // Sleep for 3 seconds
printer.wake(); // MUST wake() before printing again, even if reset
printer.setDefault(); // Restore printer to defaults
}
//****************************************************************************
void Present(){
printer.feed(1);
printer.boldOn();
printer.justify('C');
printer.setSize('L');
printer.upsideDownOn();
printer.println(F("PRESENT"));
printer.feed(4);
printer.upsideDownOff();
printer.sleep(); // Tell printer to sleep
delay(3000L); // Sleep for 3 seconds
printer.wake(); // MUST wake() before printing again, even if reset
printer.setDefault(); // Restore printer to defaults
}
//****************************************************************************
void Future(){
printer.feed(1);
printer.boldOn();
printer.justify('C');
printer.setSize('L');
printer.upsideDownOn();
printer.println(F("FUTURE"));
printer.feed(4);
printer.upsideDownOff();
printer.sleep(); // Tell printer to sleep
delay(3000L); // Sleep for 3 seconds
printer.wake(); // MUST wake() before printing again, even if reset
printer.setDefault(); // Restore printer to defaults
}
//****************************************************************************
void Relationship(){
printer.feed(1);
printer.boldOn();
printer.justify('C');
printer.setSize('M');
printer.upsideDownOn();
printer.println(F("RELATIONSHIP CARD"));
printer.feed(4);
printer.upsideDownOff();
printer.sleep(); // Tell printer to sleep
delay(3000L); // Sleep for 3 seconds
printer.wake(); // MUST wake() before printing again, even if reset
printer.setDefault(); // Restore printer to defaults
}
//****************************************************************************
void Vocation(){
printer.feed(1);
printer.boldOn();
printer.justify('C');
printer.setSize('L');
printer.upsideDownOn();
printer.println(F("VOCATION CARD"));
printer.feed(4);
printer.upsideDownOff();
printer.sleep(); // Tell printer to sleep
delay(3000L); // Sleep for 3 seconds
printer.wake(); // MUST wake() before printing again, even if reset
printer.setDefault(); // Restore printer to defaults
}
//****************************************************************************
void PickACard()
{
int val =
Entropy.random(40, 1581); // Full range of cards excluding "blanks" #0 & #20
int rem;
rem = val % 20 ;
if (rem < 10)
val -= rem;
else
val += 20 - rem; //ensure value is a multiple of 20
digitalWrite(dir, LOW); //Pull direction pin low to move "forward"
digitalWrite(MS1, HIGH); //Pull MS1, and MS2 high to set logic to 1/8th microstep resolution
digitalWrite(MS2, HIGH);
for(x= 0; x< val + 1600 ; x++) // Move spindle one full rotation before going to the choosen card
{
digitalWrite(stp,HIGH);
delayMicroseconds(1275); // delay dictates how fast the spindle rotates.
digitalWrite(stp,LOW);
delayMicroseconds(1275);
}
//****************************************************************************
//****************************************************************************
// LED CODE
if (val > 20 && val < 470) { // Major Arcana
Yellow(1);
}
else if (val > 471 && val < 750) { // Wands element: Fire
Red(1);
}
else if (val > 751 && val < 1030) { // Cups element: Water
Blue(1);
}
else if (val > 1031 && val < 1310) { // Swords element: Air
White(1);
}
else if (val > 1311 && val < 1600) { // Pentacles element: Earth
Green(1);
}
//****************************************************************************
//****************************************************************************
// PRINTER CODE
if (val == 40) // The Fool
{
int readingType = Entropy.random(0, 31);
Serial.print("The Fool");
Serial.println("");
if (readingType <= 9)
{
Serial.print("Reading type is: Upright");
Serial.println("");
File data = SD.open("0_p", FILE_READ);
printer.printBitmap(384, 660, dynamic_cast<Stream*>(&data));
data.close();
}
else if (readingType >= 10 && readingType <= 19)
{
Serial.print("Reading type is: Open");
Serial.println("");
File data = SD.open("0_o", FILE_READ);
printer.printBitmap(384, 660, dynamic_cast<Stream*>(&data));
data.close();
}
else if (readingType >= 20)
{
Serial.print("Reading type is: Reversed");
Serial.println("");
File data = SD.open("0_n", FILE_READ);
printer.printBitmap(384, 660, dynamic_cast<Stream*>(&data));
data.close();
}
}
else if (val == 60) // The Magician
{
// int readingType = 5;
// int readingType = 15;
// int readingType = 25;
int readingType = Entropy.random(0, 31);
Serial.print("The Magician");
Serial.println("");
Serial.println("");
if (readingType <= 9)
{
Serial.print("Reading type is: Upright");
Serial.println("");
File data = SD.open("1_p", FILE_READ);
printer.printBitmap(384, 661, dynamic_cast<Stream*>(&data));
data.close();
}
else if (readingType >= 10 && readingType <= 19)
{
Serial.print("Reading type is: Open");
Serial.println("");
File data = SD.open("1_o", FILE_READ);
printer.printBitmap(384, 661, dynamic_cast<Stream*>(&data));
data.close();
}
else if (readingType >= 20)
{
Serial.print("Reading type is: Reversed");
Serial.println("");
File data = SD.open("1_n", FILE_READ);
printer.printBitmap(384, 661, dynamic_cast<Stream*>(&data));
data.close();
}
}
else if (val == 80) // The High Priestess
{
// int readingType = 5;
// int readingType = 15;
// int readingType = 25;
int readingType = Entropy.random(0, 31);
Serial.print("The High Priestess");
Serial.println("");
Serial.println("");
if (readingType <= 9)
{
Serial.print("Reading type is: Upright");
Serial.println("");
File data = SD.open("2_p", FILE_READ);
printer.printBitmap(384, 661, dynamic_cast<Stream*>(&data));
data.close();
}
else if (readingType >= 10 && readingType <= 19)
{
Serial.print("Reading type is: Open");
Serial.println("");
File data = SD.open("2_o", FILE_READ);
printer.printBitmap(384, 661, dynamic_cast<Stream*>(&data));
data.close();
}
else if (readingType >= 20)
{
Serial.print("Reading type is: Reversed");
Serial.println("");
File data = SD.open("2_n", FILE_READ);
printer.printBitmap(384, 661, dynamic_cast<Stream*>(&data));
data.close();
}
}
else if (val == 100) // The Empress
{
// int readingType = 5;
// int readingType = 15;
// int readingType = 25;
int readingType = Entropy.random(0, 31);
Serial.print("The Empress");
Serial.println("");
Serial.println("");
if (readingType <= 9)
{
Serial.print("Reading type is: Upright");
Serial.println("");
File data = SD.open("3_p", FILE_READ);
printer.printBitmap(384, 661, dynamic_cast<Stream*>(&data));
data.close();
}
else if (readingType >= 10 && readingType <= 19)
{
Serial.print("Reading type is: Open");
Serial.println("");
File data = SD.open("3_o", FILE_READ);
printer.printBitmap(384, 661, dynamic_cast<Stream*>(&data));
data.close();
}
else if (readingType >= 20)
{
Serial.print("Reading type is: Reversed");
Serial.println("");
File data = SD.open("3_n", FILE_READ);
printer.printBitmap(384, 661, dynamic_cast<Stream*>(&data));
data.close();
}
}
else if (val == 120) // The Emperor
{
// int readingType = 5;
// int readingType = 15;
// int readingType = 25;
int readingType = Entropy.random(0, 31);
Serial.print("The Emperor");
Serial.println("");
Serial.println("");
if (readingType <= 9)
{
Serial.print("Reading type is: Upright");
Serial.println("");
File data = SD.open("4_p", FILE_READ);
printer.printBitmap(384, 661, dynamic_cast<Stream*>(&data));
data.close();
}
else if (readingType >= 10 && readingType <= 19)
{
Serial.print("Reading type is: Open");
Serial.println("");
File data = SD.open("4_o", FILE_READ);
printer.printBitmap(384, 661, dynamic_cast<Stream*>(&data));
data.close();
}
else if (readingType >= 20)
{
Serial.print("Reading type is: Reversed");
Serial.println("");
File data = SD.open("4_n", FILE_READ);
printer.printBitmap(384, 661, dynamic_cast<Stream*>(&data));
data.close();
}
}
else if (val == 140) // The Hierophant
{
// int readingType = 5;
// int readingType = 15;
// int readingType = 25;
int readingType = Entropy.random(0, 31);
Serial.print("The Hierophant");
Serial.println("");
Serial.println("");
if (readingType <= 9)
{
Serial.print("Reading type is: Upright");
Serial.println("");
File data = SD.open("5_p", FILE_READ);
printer.printBitmap(384, 661, dynamic_cast<Stream*>(&data));
data.close();
}
else if (readingType >= 10 && readingType <= 19)
{
Serial.print("Reading type is: Open");
Serial.println("");
File data = SD.open("5_o", FILE_READ);
printer.printBitmap(384, 661, dynamic_cast<Stream*>(&data));
data.close();
}
else if (readingType >= 20)
{
Serial.print("Reading type is: Reversed");
Serial.println("");
File data = SD.open("5_n", FILE_READ);
printer.printBitmap(384, 661, dynamic_cast<Stream*>(&data));
data.close();
}
}
else if (val == 160) // The Lovers
{
// int readingType = 5;
// int readingType = 15;
// int readingType = 25;
int readingType = Entropy.random(0, 31);
Serial.print("The Lovers");
Serial.println("");
Serial.println("");
if (readingType <= 9)
{
Serial.print("Reading type is: Upright");
Serial.println("");
File data = SD.open("6_p", FILE_READ);
printer.printBitmap(384, 661, dynamic_cast<Stream*>(&data));
data.close();
}
else if (readingType >= 10 && readingType <= 19)
{
Serial.print("Reading type is: Open");
Serial.println("");
File data = SD.open("6_o", FILE_READ);
printer.printBitmap(384, 661, dynamic_cast<Stream*>(&data));
data.close();
}
else if (readingType >= 20)
{
Serial.print("Reading type is: Reversed");
Serial.println("");
File data = SD.open("6_n", FILE_READ);
printer.printBitmap(384, 661, dynamic_cast<Stream*>(&data));
data.close();
}
}
else if (val == 180) // The Chariot
{
// int readingType = 5;
// int readingType = 15;
// int readingType = 25;
int readingType = Entropy.random(0, 31);
Serial.print("The Chariot");
Serial.println("");
Serial.println("");
if (readingType <= 9)
{
Serial.print("Reading type is: Upright");
Serial.println("");
File data = SD.open("7_p", FILE_READ);
printer.printBitmap(384, 661, dynamic_cast<Stream*>(&data));
data.close();
}
else if (readingType >= 10 && readingType <= 19)
{
Serial.print("Reading type is: Open");
Serial.println("");
File data = SD.open("7_o", FILE_READ);
printer.printBitmap(384, 661, dynamic_cast<Stream*>(&data));
data.close();
}
else if (readingType >= 20)
{
Serial.print("Reading type is: Reversed");
Serial.println("");
File data = SD.open("7_n", FILE_READ);
printer.printBitmap(384, 661, dynamic_cast<Stream*>(&data));
data.close();
}
}
else if (val == 200) // Strength
{
// int readingType = 5;
// int readingType = 15;
// int readingType = 25;
int readingType = Entropy.random(0, 31);
Serial.println("Strength");
Serial.println("");
Serial.println("");
if (readingType <= 9)
{
Serial.print("Reading type is: Upright");
Serial.println("");
File data = SD.open("8_p", FILE_READ);
printer.printBitmap(384, 661, dynamic_cast<Stream*>(&data));
data.close();
}
else if (readingType >= 10 && readingType <= 19)
{
Serial.print("Reading type is: Open");
Serial.println("");
File data = SD.open("8_o", FILE_READ);
printer.printBitmap(384, 661, dynamic_cast<Stream*>(&data));
data.close();
}
else if (readingType >= 20)
{
Serial.print("Reading type is: Reversed");
Serial.println("");
File data = SD.open("8_n", FILE_READ);
printer.printBitmap(384, 661, dynamic_cast<Stream*>(&data));
data.close();
}
}
else if (val == 220) // The Hermit
{
// int readingType = 5;
// int readingType = 15;
// int readingType = 25;
int readingType = Entropy.random(0, 31);
Serial.print("The Hermit");
Serial.println("");
Serial.println("");
if (readingType <= 9)
{
Serial.print("Reading type is: Upright");
Serial.println("");
File data = SD.open("9_p", FILE_READ);
printer.printBitmap(384, 661, dynamic_cast<Stream*>(&data));
data.close();
}
else if (readingType >= 10 && readingType <= 19)
{
Serial.print("Reading type is: Open");
Serial.println("");
File data = SD.open("9_o", FILE_READ);
printer.printBitmap(384, 661, dynamic_cast<Stream*>(&data));
data.close();
}
else if (readingType >= 20)
{
Serial.print("Reading type is: Reversed");
Serial.println("");
File data = SD.open("9_n", FILE_READ);
printer.printBitmap(384, 661, dynamic_cast<Stream*>(&data));
data.close();
}
}
else if (val == 240) // Wheel of Fortune
{
// int readingType = 5;
// int readingType = 15;
// int readingType = 25;
int readingType = Entropy.random(0, 31);
Serial.print("Wheel of Fortune");
Serial.println("");
Serial.println("");
if (readingType <= 9)
{
Serial.print("Reading type is: Upright");
Serial.println("");
File data = SD.open("10_p", FILE_READ);
printer.printBitmap(384, 661, dynamic_cast<Stream*>(&data));
data.close();
}
else if (readingType >= 10 && readingType <= 19)
{
Serial.print("Reading type is: Open");
Serial.println("");
File data = SD.open("10_o", FILE_READ);
printer.printBitmap(384, 661, dynamic_cast<Stream*>(&data));
data.close();
}
else if (readingType >= 20)
{
Serial.print("Reading type is: Reversed");
Serial.println("");
File data = SD.open("10_n", FILE_READ);
printer.printBitmap(384, 661, dynamic_cast<Stream*>(&data));
data.close();
}
}
else if (val == 260) // Justice
{
// int readingType = 5;
// int readingType = 15;
// int readingType = 25;
int readingType = Entropy.random(0, 31);
Serial.print("Justice");
Serial.println("");
Serial.println("");
if (readingType <= 9)
{
Serial.print("Reading type is: Upright");
Serial.println("");
File data = SD.open("11_p", FILE_READ);
printer.printBitmap(384, 661, dynamic_cast<Stream*>(&data));
data.close();
}
else if (readingType >= 10 && readingType <= 19)
{
Serial.print("Reading type is: Open");
Serial.println("");
File data = SD.open("11_o", FILE_READ);
printer.printBitmap(384, 661, dynamic_cast<Stream*>(&data));
data.close();
}
else if (readingType >= 20)
{
Serial.print("Reading type is: Reversed");
Serial.println("");
File data = SD.open("11_n", FILE_READ);
printer.printBitmap(384, 661, dynamic_cast<Stream*>(&data));
data.close();
}
}
else if (val == 280) // The Hanged Man
{
// int readingType = 5;
// int readingType = 15;
// int readingType = 25;
int readingType = Entropy.random(0, 31);
Serial.print("The Hanged Man");
Serial.println("");
Serial.println("");
if (readingType <= 9)
{
Serial.print("Reading type is: Upright");
Serial.println("");
File data = SD.open("12_p", FILE_READ);
printer.printBitmap(384, 660, dynamic_cast<Stream*>(&data));
data.close();
}
else if (readingType >= 10 && readingType <= 19)
{
Serial.print("Reading type is: Open");
Serial.println("");
File data = SD.open("12_o", FILE_READ);
printer.printBitmap(384, 660, dynamic_cast<Stream*>(&data));
data.close();
}
else if (readingType >= 20)
{
Serial.print("Reading type is: Reversed");
Serial.println("");
File data = SD.open("12_n", FILE_READ);
printer.printBitmap(384, 660, dynamic_cast<Stream*>(&data));
data.close();
}
}
else if (val == 300) // Death
{
// int readingType = 5;
// int readingType = 15;
// int readingType = 25;
int readingType = Entropy.random(0, 31);
Serial.print("Death");
Serial.println("");
Serial.println("");
if (readingType <= 9)
{
Serial.print("Reading type is: Upright");
Serial.println("");
File data = SD.open("13_p", FILE_READ);
printer.printBitmap(384, 661, dynamic_cast<Stream*>(&data));
data.close();
}
else if (readingType >= 10 && readingType <= 19)
{
Serial.print("Reading type is: Open");
Serial.println("");
File data = SD.open("13_o", FILE_READ);
printer.printBitmap(384, 661, dynamic_cast<Stream*>(&data));
data.close();
}
else if (readingType >= 20)
{
Serial.print("Reading type is: Reversed");
Serial.println("");
File data = SD.open("13_n", FILE_READ);
printer.printBitmap(384, 661, dynamic_cast<Stream*>(&data));
data.close();
}
}
else if (val == 320) // Temperance
{
// int readingType = 5;
// int readingType = 15;
// int readingType = 25;
int readingType = Entropy.random(0, 31);
Serial.print("Temperance");
Serial.println("");
if (readingType <= 9)
{
Serial.print("Reading type is: Upright");
Serial.println("");
File data = SD.open("14_p", FILE_READ);
printer.printBitmap(384, 661, dynamic_cast<Stream*>(&data));
data.close();
}
else if (readingType >= 10 && readingType <= 19)
{
Serial.print("Reading type is: Open");
Serial.println("");
File data = SD.open("14_o", FILE_READ);
printer.printBitmap(384, 661, dynamic_cast<Stream*>(&data));
data.close();
}
else if (readingType >= 20)
{
Serial.print("Reading type is: Reversed");
Serial.println("");
File data = SD.open("14_n", FILE_READ);
printer.printBitmap(384, 661, dynamic_cast<Stream*>(&data));
data.close();
}
}
else if (val == 340) // The Devil
{
// int readingType = 5;
// int readingType = 15;
// int readingType = 25;
int readingType = Entropy.random(0, 31);
Serial.print("The Devil");
Serial.println("");
if (readingType <= 9)
{
Serial.print("Reading type is: Upright");
Serial.println("");
File data = SD.open("15_p", FILE_READ);
printer.printBitmap(384, 661, dynamic_cast<Stream*>(&data));
data.close();
}
else if (readingType >= 10 && readingType <= 19)
{
Serial.print("Reading type is: Open");
Serial.println("");
File data = SD.open("15_o", FILE_READ);
printer.printBitmap(384, 661, dynamic_cast<Stream*>(&data));
data.close();
}
else if (readingType >= 20)
{
Serial.print("Reading type is: Reversed");
Serial.println("");
File data = SD.open("15_n", FILE_READ);
printer.printBitmap(384, 661, dynamic_cast<Stream*>(&data));
data.close();
}
}
else if (val == 360) // The Tower
{
// int readingType = 5;
// int readingType = 15;
// int readingType = 25;
int readingType = Entropy.random(0, 31);
Serial.print("The Tower");
Serial.println("");
if (readingType <= 9)
{
Serial.print("Reading type is: Upright");
Serial.println("");
File data = SD.open("16_p", FILE_READ);
printer.printBitmap(384, 661, dynamic_cast<Stream*>(&data));
data.close();
}
else if (readingType >= 10 && readingType <= 19)
{
Serial.print("Reading type is: Open");
Serial.println("");
File data = SD.open("16_o", FILE_READ);
printer.printBitmap(384, 661, dynamic_cast<Stream*>(&data));
data.close();
}
else if (readingType >= 20)
{
Serial.print("Reading type is: Reversed");
Serial.println("");
File data = SD.open("16_n", FILE_READ);
printer.printBitmap(384, 661, dynamic_cast<Stream*>(&data));
data.close();
}
}
else if (val == 380) //The Star
{
// int readingType = 5;
// int readingType = 15;
// int readingType = 25;
int readingType = Entropy.random(0, 31);
Serial.print("The Star");
Serial.println("");
Serial.println("");
if (readingType <= 9)
{
Serial.print("Reading type is: Upright");
Serial.println("");
File data = SD.open("17_p", FILE_READ);
printer.printBitmap(384, 661, dynamic_cast<Stream*>(&data));
data.close();
}
else if (readingType >= 10 && readingType <= 19)
{
Serial.print("Reading type is: Open");
Serial.println("");
File data = SD.open("17_o", FILE_READ);
printer.printBitmap(384, 661, dynamic_cast<Stream*>(&data));
data.close();
}
else if (readingType >= 20)
{
Serial.print("Reading type is: Reversed");
Serial.println("");
File data = SD.open("17_n", FILE_READ);
printer.printBitmap(384, 661, dynamic_cast<Stream*>(&data));
data.close();
}
}
else if (val == 400) // The Moon
{
// int readingType = 5;
// int readingType = 15;
// int readingType = 25;
int readingType = Entropy.random(0, 31);
Serial.print("The Moon");
Serial.println("");
Serial.println("");
if (readingType <= 9)
{
Serial.print("Reading type is: Upright");
Serial.println("");
File data = SD.open("18_p", FILE_READ);
printer.printBitmap(384, 661, dynamic_cast<Stream*>(&data));
data.close();
}
else if (readingType >= 10 && readingType <= 19)
{
Serial.print("Reading type is: Open");
Serial.println("");
File data = SD.open("18_o", FILE_READ);
printer.printBitmap(384, 661, dynamic_cast<Stream*>(&data));
data.close();
}
...
This file has been truncated, please download it to see its full contents.












_3u05Tpwasz.png?auto=compress%2Cformat&w=40&h=40&fit=fillmax&bg=fff&dpr=2)
{kind=link}
Comments