

Hardware components | ||||||
 |
| × | 2 | |||
_zhWsCcSEcl.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff) |
| × | 1 | |||
 |
| × | 6 | |||
| × | 6 | ||||
| × | 3 | ||||
| × | 12 | ||||
| × | 3 | ||||
| × | 1 | ||||
 |
| × | 3 | |||
 |
| × | 3 | |||
| × | 3 | ||||
 |
| × | 72 | |||
Software apps and online services | ||||||
 |
| |||||
Hand tools and fabrication machines | ||||||
 |
| |||||
 |
| |||||
 |
| |||||
 |
| |||||
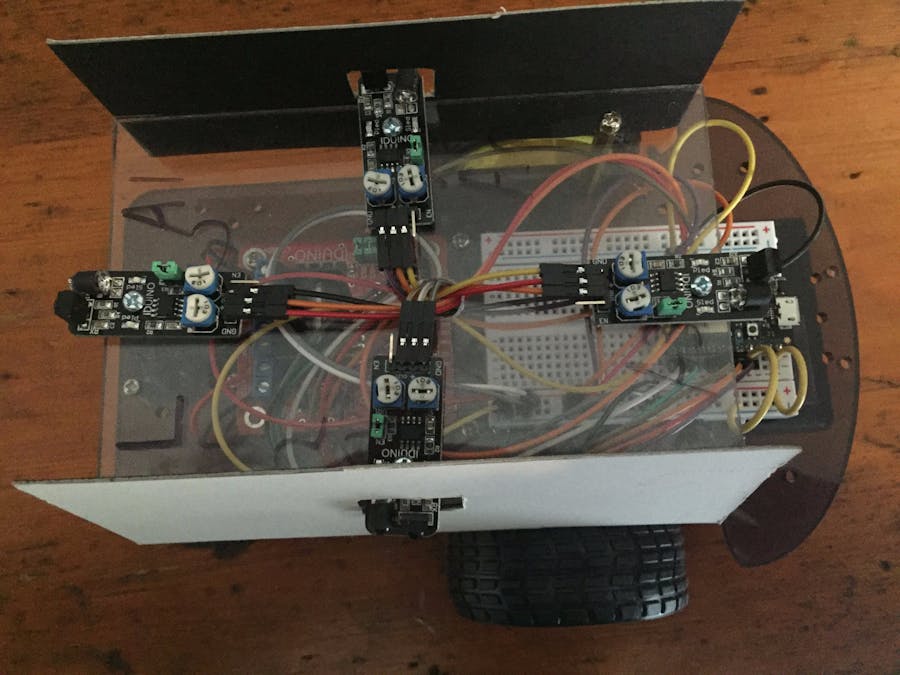
I've always wanted to make my own swarm however the KiloBots at the retail price of $150 simply was just to expensive. So I decided to go ahead and make my own that not only have interchangeable sensors but also an interchangeable wheel base to let me truely test and develop some cool algorithms I make.
// This #include statement was automatically added by the Particle IDE.
#include <google-maps-device-locator.h>
#include <stdio.h>
#include <stdlib.h>
GoogleMapsDeviceLocator locator;
SerialLogHandler logHandler;
//----------------
int NodeLeftS1;
int NodeLeftS2;
int NodeLeftS3;
int NodeLeftS4;
int NodeRightS1;
int NodeRightS2;
int NodeRightS3;
int NodeRightS4;
//Motor A
int IN1 = D7;
int IN2 = D6;
int SPEEDPINA = D1;
//Motor B
int IN3 = D5;
int IN4 = D4;
int SPEEDPINB = D0;
//IR Sensors Declaration
int IRSensor1 = A0;
int IRSensor2 = A1;
int IRSensor3 = A2;
int IRSensor4 = A3;
//IR Sensor Read (Count)
int Sensor1;
int Sensor2;
int Sensor3;
int Sensor4;
void setup()
{
//MOTORS
pinMode(IN1, OUTPUT);
pinMode(IN2, OUTPUT);
pinMode(IN3, OUTPUT);
pinMode(IN4, OUTPUT);
pinMode(SPEEDPINA, OUTPUT);
pinMode(SPEEDPINB, OUTPUT);
digitalWrite(IN1, HIGH);
digitalWrite(IN2, HIGH);
digitalWrite(IN3, HIGH);
digitalWrite(IN4, HIGH);
//IR Sensors
pinMode(IRSensor1, INPUT);
pinMode(IRSensor2, INPUT);
pinMode(IRSensor3, INPUT);
pinMode(IRSensor4, INPUT);
Particle.subscribe("LS1NoObject", loop2);
//Particle.subscribe("LS1NoObject", loop2);
Particle.subscribe("LS2NoObject", loop2);
//Google Maps
Serial.begin(9600);
//Particle.publish("test2", "This is a test");
//locator.withLocatePeriodic(30);
}
//Try adding both within the loop here
void loop()
{
//Try analog Read Tommorow if this still does not work
Sensor1 = digitalRead(IRSensor1);
Sensor2 = digitalRead(IRSensor2);
Sensor3 = digitalRead(IRSensor3);
Sensor4 = digitalRead(IRSensor4);
//char Sensor1Str[30];
//sprintf(Sensor1Str,"%d", Sensor1);
//Particle.publish("LeaderSensor1", Sensor1Str, 21600, PUBLIC);
if (Sensor1 == 0 && Sensor2 == 1 && Sensor3 == 0 && Sensor4 == 1)
{
Particle.publish("Should be going", PUBLIC);
//Particle.publish("Swarm Mates Found", PUBLIC);
digitalWrite(IN2, LOW);
digitalWrite(IN1, HIGH);
analogWrite(SPEEDPINA, 255);
digitalWrite(IN4, LOW);
digitalWrite(IN3, HIGH);
analogWrite(SPEEDPINB, 255);
}
else
{
StopAll();
}
//Object Detected on sensor 1
//if (Sensor1 == 0)
//{
// Particle.publish("LeaderS1", "Object", 60, PRIVATE);
// delay(1);
//}
//if (Sensor2 == 0)
//{
// Particle.publish("LeaderS2", "Object", 60, PRIVATE);
// delay(1);
//}
if (Sensor1 == 0)
{
Particle.publish("LeaderS1", "Object");
delay(3000);
}
if (Sensor1 == 1)
{
Particle.publish("LeaderS1NoObject", "NoObject");
delay(3000);
}
if (Sensor3 == 0)
{
Particle.publish("LeaderS3", "Object");
delay(3000);
}
if (Sensor3 == 1)
{
Particle.publish("LeaderS3NoObject", "NoObject");
delay(3000);
}
//if (Sensor4 == 0)
//{
// Particle.publish("LeaderS4", "Object", 60, PRIVATE);
// delay(1);
//}
// get here if event publish did not work
}
/*digitalWrite(IN2, LOW);
digitalWrite(IN1, HIGH);
analogWrite(SPEEDPINA, 255);
digitalWrite(IN4, LOW);
digitalWrite(IN3, HIGH);
analogWrite(SPEEDPINB, 255);*/
void StopAll()
{
digitalWrite(IN1, LOW);
digitalWrite(IN2, LOW);
digitalWrite(IN3, LOW);
digitalWrite(IN4, LOW);
analogWrite(SPEEDPINA, 100);
analogWrite(SPEEDPINB, 100);
}
void loop2(const char *event, const char *data)
{
digitalWrite(IN1, LOW);
digitalWrite(IN2, LOW);
digitalWrite(IN3, LOW);
digitalWrite(IN4, LOW);
/*if (Sensor1 == 0)
{
Particle.publish("LeaderS1", "Object");
delay(3000);
}
if (Sensor1 == 1)
{
Particle.publish("LeaderS1NoObject", "NoObject");
delay(3000);
}
if (Sensor3 == 0)
{
Particle.publish("LeaderS3", "Object");
delay(3000);
}
if (Sensor3 == 1)
{
Particle.publish("LeaderS3NoObject", "NoObject");
delay(3000);
}*/
StopAll();
}
/*void SensorTest()
{
if (Sensor1 == 1 && Sensor2 == 1 && Sensor3 == 1 && Sensor4 == 1)
{
Particle.publish("No Object", PUBLIC);
digitalWrite(IN1, HIGH);
digitalWrite(IN2, LOW);
analogWrite(SPEEDPINA, 150);
delay(2000);
digitalWrite(IN1, LOW);
digitalWrite(IN2, LOW);
}
//<<<<<<<<<<<<<<<<<<<Object Detected on 4 Sensors>>>>>>>>>>>>>>>>>>>>>>>>>>>
else if (Sensor1 == 0 && Sensor2 == 0 && Sensor3 == 0 && Sensor4 == 0)
{
Particle.publish("Object detected on All Sensors 1,2,3,4" , PUBLIC);
}
//<<<<<<<<<<<<<<<<<<<<Object Detected on Three Sensors >>>>>>>>>>>>>>>>>>>>>
else if (Sensor1 == 0 && Sensor2 == 0 && Sensor3 == 0 && Sensor4 == 1)
{
Particle.publish("Object detected on Sensor 1,2,3" , PUBLIC);
}
else if (Sensor1 == 0 && Sensor2 == 0 && Sensor3 == 1 && Sensor4 == 4)
{
Particle.publish("Object detected on Sensor 1,2,4" , PUBLIC);
}
else if (Sensor1 == 0 && Sensor2 == 1 && Sensor3 == 0 && Sensor4 == 0)
{
Particle.publish("Object detected on Sensor 1,3,4" , PUBLIC);
}
else if (Sensor1 == 1 && Sensor2 == 0 && Sensor3 == 0 && Sensor4 == 0)
{
Particle.publish("Object detected on Sensor 2,3,4" , PUBLIC);
}
//<<<<<<<<<<<<<<<<<<<<<<Object Detected on two sensors>>>>>>>>>>>>>>>>>>>>>>>>
//Sensor 1
else if (Sensor1 == 0 && Sensor2 == 0 && Sensor3 == 1 && Sensor4 == 1)
{
Particle.publish("Object detected on Sensor 1 and 2" , PUBLIC);
}
else if (Sensor1 == 0 && Sensor2 == 1 && Sensor3 == 0 && Sensor4 == 1)
{
Particle.publish("Object detected on Sensor 1 and 3" , PUBLIC);
}
else if (Sensor1 == 0 && Sensor2 == 1 && Sensor3 == 1 && Sensor4 == 0)
{
Particle.publish("Object detected on Sensor 1 and 4" , PUBLIC);
}
//Sensor 2
else if (Sensor1 == 1 && Sensor2 == 0 && Sensor3 == 0 && Sensor4 == 1)
{
Particle.publish("Object detected on Sensor 2 and 3" , PUBLIC);
}
else if (Sensor1 == 1 && Sensor2 == 0 && Sensor3 == 1 && Sensor4 == 0)
{
Particle.publish("Object detected on Sensor 2 and 4" , PUBLIC);
}
//Sensor 3
else if (Sensor1 == 1 && Sensor2 == 1 && Sensor3 == 0 && Sensor4 == 0)
{
Particle.publish("Object detected on Sensor 3 and 4" , PUBLIC);
}
//<<<<<<<<<<<<<<<<<<<<<Object Detected on Single Sensor>>>>>>>>>>>>>>>>>>>>>>>
else if (Sensor1 == 0 && Sensor2 == 1 && Sensor3 == 1 && Sensor4 == 1)
{
Particle.publish("Object detected on sensor 1", PUBLIC);
}
else if (Sensor1 == 1 && Sensor2 == 0 && Sensor3 == 1 && Sensor4 == 1)
{
Particle.publish("Object detected on sensor 2", PUBLIC);
}
else if (Sensor1 == 1 && Sensor2 == 1 && Sensor3 == 0 && Sensor4 == 1)
{
Particle.publish("Object detected on sensor 3", PUBLIC);
}
else if (Sensor1 == 1 && Sensor2 == 1 && Sensor3 == 1 && Sensor4 == 4)
{
Particle.publish("Object detected on sensor 4", PUBLIC);
}
}
void SensorFinder()
{
if (Sensor1 == 0)
{
digitalWrite(IN2, LOW);
digitalWrite(IN1, HIGH);
analogWrite(SPEEDPINA, 150);
digitalWrite(IN4, LOW);
digitalWrite(IN3, HIGH);
analogWrite(SPEEDPINB, 150);
}
//Nothing dont go
if (Sensor1 == 1)
{
digitalWrite(IN2, LOW);
digitalWrite(IN1, LOW);
digitalWrite(IN4, LOW);
digitalWrite(IN3, LOW);
}
//Object go
//Sensor 2
if (Sensor2 == 0)
{
digitalWrite(IN2, LOW);
digitalWrite(IN1, HIGH);
analogWrite(SPEEDPINA, 150);
digitalWrite(IN4, LOW);
digitalWrite(IN3, HIGH);
analogWrite(SPEEDPINB, 150);
}
//Nothing dont go
if (Sensor2 == 1)
{
digitalWrite(IN2, LOW);
digitalWrite(IN1, LOW);
digitalWrite(IN4, LOW);
digitalWrite(IN3, LOW);
}
//Sensor3
if (Sensor3 == 0)
{
digitalWrite(IN2, LOW);
digitalWrite(IN1, HIGH);
analogWrite(SPEEDPINA, 150);
digitalWrite(IN4, LOW);
digitalWrite(IN3, HIGH);
analogWrite(SPEEDPINB, 150);
}
//Nothing dont go
if (Sensor3 == 1)
{
digitalWrite(IN2, LOW);
digitalWrite(IN1, LOW);
digitalWrite(IN4, LOW);
digitalWrite(IN3, LOW);
}
//Sensor 4
if (Sensor4 == 0)
{
digitalWrite(IN2, LOW);
digitalWrite(IN1, HIGH);
analogWrite(SPEEDPINA, 150);
digitalWrite(IN4, LOW);
digitalWrite(IN3, HIGH);
analogWrite(SPEEDPINB, 150);
}
//Nothing dont go
if (Sensor4 == 1)
{
digitalWrite(IN2, LOW);
digitalWrite(IN1, LOW);
digitalWrite(IN4, LOW);
digitalWrite(IN3, LOW);
}
}
*/
//Device ID - 270035000147373336323230
//Accesss Token - bee763562c709a8cec07705008beb1e4f8372e38
// This #include statement was automatically added by the Particle IDE.
#include <google-maps-device-locator.h>
GoogleMapsDeviceLocator locator;
SerialLogHandler logHandler;
//----------------
//Motor A
int IN1 = D7;
int IN2 = D6;
int SPEEDPINA = D1;
//Motor B
int IN3 = D5;
int IN4 = D4;
int SPEEDPINB = D0;
//IR Sensors Declaration
int IRSensor1 = A0;
int IRSensor2 = A1;
int IRSensor3 = A2;
int IRSensor4 = A3;
//IR Sensor Read (Count)
int Sensor1;
int Sensor2;
int Sensor3;
int Sensor4;
void setup()
{
//MOTORS
pinMode(IN1, OUTPUT);
pinMode(IN2, OUTPUT);
pinMode(IN3, OUTPUT);
pinMode(IN4, OUTPUT);
pinMode(SPEEDPINA, OUTPUT);
pinMode(SPEEDPINB, OUTPUT);
digitalWrite(IN1, HIGH);
digitalWrite(IN2, HIGH);
digitalWrite(IN3, HIGH);
digitalWrite(IN4, HIGH);
//IR Sensors
pinMode(IRSensor1, INPUT);
pinMode(IRSensor2, INPUT);
pinMode(IRSensor3, INPUT);
pinMode(IRSensor4, INPUT);
//Google Maps
Particle.subscribe("LeaderS3", loop);
Particle.subscribe("LeaderS3NoObject", loop2);
Serial.begin(9600);
//locator.withLocatePeriodic(30);
}
//void loop(const char *event, const char *data)
void loop(const char *event, const char *data)
{
//Try analog Read Tommorow if this still does not work
Sensor1 = digitalRead(IRSensor1);
Sensor2 = digitalRead(IRSensor2);
Sensor3 = digitalRead(IRSensor3);
Sensor4 = digitalRead(IRSensor4);
//Particle.publish(event, "This is a test");
// const char LS1 = LeaderS1(char *event,char *LS1);
//const char LeaderSensor1 = LS1;
//char Sensor1Str[30];
//sprintf(Sensor1Str,"%d", Sensor1);
//Particle.publish("LeaderSensor1", Sensor1Str, 21600, PUBLIC);
if (Sensor1 == 0)
{
Particle.publish("LS1", "Obect");
delay(3000);
}
if (Sensor1 == 1)
{
Particle.publish("LS1NoObject", "Obect");
delay(3000);
}
if (Sensor1 == 0 && Sensor2 == 1 && Sensor3 == 1 && Sensor4 == 1)
{
//Particle.publish("Swarm Mates Found", PUBLIC);
digitalWrite(IN2, LOW);
digitalWrite(IN1, HIGH);
analogWrite(SPEEDPINA, 255);
digitalWrite(IN4, LOW);
digitalWrite(IN3, HIGH);
analogWrite(SPEEDPINB, 255);
}
else
{
StopAll();
}
}
void loop2(const char *event, const char *data)
{
/*if (Sensor1 == 0)
{
Particle.publish("LS1", "Obect");
delay(3000);
}
if (Sensor1 == 1)
{
Particle.publish("LS1NoObject", "Obect");
delay(3000);
}*/
StopAll();
}
void StopAll()
{
digitalWrite(IN1, LOW);
digitalWrite(IN2, LOW);
digitalWrite(IN3, LOW);
digitalWrite(IN4, LOW);
analogWrite(SPEEDPINA, 100);
analogWrite(SPEEDPINB, 100);
}
/*void myHandler(const char *event, const char *data)
{
int i = 0;
i++;
Serial.print(i);
Serial.print(event);
Serial.print(", data: ");
if (data)
{
Serial.println(data);
Particle.publish("Leader", "This is a test");
}
}
*/
/*void SensorTest()
{
if (Sensor1 == 1 && Sensor2 == 1 && Sensor3 == 1 && Sensor4 == 1)
{
Particle.publish("No Object", PUBLIC);
digitalWrite(IN1, HIGH);
digitalWrite(IN2, LOW);
analogWrite(SPEEDPINA, 150);
delay(2000);
digitalWrite(IN1, LOW);
digitalWrite(IN2, LOW);
}
//<<<<<<<<<<<<<<<<<<<Object Detected on 4 Sensors>>>>>>>>>>>>>>>>>>>>>>>>>>>
else if (Sensor1 == 0 && Sensor2 == 0 && Sensor3 == 0 && Sensor4 == 0)
{
Particle.publish("Object detected on All Sensors 1,2,3,4" , PUBLIC);
}
//<<<<<<<<<<<<<<<<<<<<Object Detected on Three Sensors >>>>>>>>>>>>>>>>>>>>>
else if (Sensor1 == 0 && Sensor2 == 0 && Sensor3 == 0 && Sensor4 == 1)
{
Particle.publish("Object detected on Sensor 1,2,3" , PUBLIC);
}
else if (Sensor1 == 0 && Sensor2 == 0 && Sensor3 == 1 && Sensor4 == 4)
{
Particle.publish("Object detected on Sensor 1,2,4" , PUBLIC);
}
else if (Sensor1 == 0 && Sensor2 == 1 && Sensor3 == 0 && Sensor4 == 0)
{
Particle.publish("Object detected on Sensor 1,3,4" , PUBLIC);
}
else if (Sensor1 == 1 && Sensor2 == 0 && Sensor3 == 0 && Sensor4 == 0)
{
Particle.publish("Object detected on Sensor 2,3,4" , PUBLIC);
}
//<<<<<<<<<<<<<<<<<<<<<<Object Detected on two sensors>>>>>>>>>>>>>>>>>>>>>>>>
//Sensor 1
else if (Sensor1 == 0 && Sensor2 == 0 && Sensor3 == 1 && Sensor4 == 1)
{
Particle.publish("Object detected on Sensor 1 and 2" , PUBLIC);
}
else if (Sensor1 == 0 && Sensor2 == 1 && Sensor3 == 0 && Sensor4 == 1)
{
Particle.publish("Object detected on Sensor 1 and 3" , PUBLIC);
}
else if (Sensor1 == 0 && Sensor2 == 1 && Sensor3 == 1 && Sensor4 == 0)
{
Particle.publish("Object detected on Sensor 1 and 4" , PUBLIC);
}
//Sensor 2
else if (Sensor1 == 1 && Sensor2 == 0 && Sensor3 == 0 && Sensor4 == 1)
{
Particle.publish("Object detected on Sensor 2 and 3" , PUBLIC);
}
else if (Sensor1 == 1 && Sensor2 == 0 && Sensor3 == 1 && Sensor4 == 0)
{
Particle.publish("Object detected on Sensor 2 and 4" , PUBLIC);
}
//Sensor 3
else if (Sensor1 == 1 && Sensor2 == 1 && Sensor3 == 0 && Sensor4 == 0)
{
Particle.publish("Object detected on Sensor 3 and 4" , PUBLIC);
}
//<<<<<<<<<<<<<<<<<<<<<Object Detected on Single Sensor>>>>>>>>>>>>>>>>>>>>>>>
else if (Sensor1 == 0 && Sensor2 == 1 && Sensor3 == 1 && Sensor4 == 1)
{
Particle.publish("Object detected on sensor 1", PUBLIC);
}
else if (Sensor1 == 1 && Sensor2 == 0 && Sensor3 == 1 && Sensor4 == 1)
{
Particle.publish("Object detected on sensor 2", PUBLIC);
}
else if (Sensor1 == 1 && Sensor2 == 1 && Sensor3 == 0 && Sensor4 == 1)
{
Particle.publish("Object detected on sensor 3", PUBLIC);
}
else if (Sensor1 == 1 && Sensor2 == 1 && Sensor3 == 1 && Sensor4 == 4)
{
Particle.publish("Object detected on sensor 4", PUBLIC);
}
}
void SensorFinder()
{
if (Sensor1 == 0)
{
digitalWrite(IN2, LOW);
digitalWrite(IN1, HIGH);
analogWrite(SPEEDPINA, 150);
digitalWrite(IN4, LOW);
digitalWrite(IN3, HIGH);
analogWrite(SPEEDPINB, 150);
}
//Nothing dont go
if (Sensor1 == 1)
{
digitalWrite(IN2, LOW);
digitalWrite(IN1, LOW);
digitalWrite(IN4, LOW);
digitalWrite(IN3, LOW);
}
//Object go
//Sensor 2
if (Sensor2 == 0)
{
digitalWrite(IN2, LOW);
digitalWrite(IN1, HIGH);
analogWrite(SPEEDPINA, 150);
digitalWrite(IN4, LOW);
digitalWrite(IN3, HIGH);
analogWrite(SPEEDPINB, 150);
}
//Nothing dont go
if (Sensor2 == 1)
{
digitalWrite(IN2, LOW);
digitalWrite(IN1, LOW);
digitalWrite(IN4, LOW);
digitalWrite(IN3, LOW);
}
//Sensor3
if (Sensor3 == 0)
{
digitalWrite(IN2, LOW);
digitalWrite(IN1, HIGH);
analogWrite(SPEEDPINA, 150);
digitalWrite(IN4, LOW);
digitalWrite(IN3, HIGH);
analogWrite(SPEEDPINB, 150);
}
//Nothing dont go
if (Sensor3 == 1)
{
digitalWrite(IN2, LOW);
digitalWrite(IN1, LOW);
digitalWrite(IN4, LOW);
digitalWrite(IN3, LOW);
}
//Sensor 4
if (Sensor4 == 0)
{
digitalWrite(IN2, LOW);
digitalWrite(IN1, HIGH);
analogWrite(SPEEDPINA, 150);
digitalWrite(IN4, LOW);
digitalWrite(IN3, HIGH);
analogWrite(SPEEDPINB, 150);
}
//Nothing dont go
if (Sensor4 == 1)
{
digitalWrite(IN2, LOW);
digitalWrite(IN1, LOW);
digitalWrite(IN4, LOW);
digitalWrite(IN3, LOW);
}
}
*/
//Device ID - 270035000147373336323230
//Accesss Token - bee763562c709a8cec07705008beb1e4f8372e38
// This #include statement was automatically added by the Particle IDE.
#include <google-maps-device-locator.h>
GoogleMapsDeviceLocator locator;
SerialLogHandler logHandler;
//----------------
//Motor A
int IN1 = D7;
int IN2 = D6;
int SPEEDPINA = D1;
//Motor B
int IN3 = D5;
int IN4 = D4;
int SPEEDPINB = D0;
//IR Sensors Declaration
int IRSensor1 = A0;
int IRSensor2 = A1;
int IRSensor3 = A2;
int IRSensor4 = A3;
//IR Sensor Read (Count)
int Sensor1;
int Sensor2;
int Sensor3;
int Sensor4;
void setup()
{
//MOTORS
pinMode(IN1, OUTPUT);
pinMode(IN2, OUTPUT);
pinMode(IN3, OUTPUT);
pinMode(IN4, OUTPUT);
pinMode(SPEEDPINA, OUTPUT);
pinMode(SPEEDPINB, OUTPUT);
digitalWrite(IN1, HIGH);
digitalWrite(IN2, HIGH);
digitalWrite(IN3, HIGH);
digitalWrite(IN4, HIGH);
//IR Sensors
pinMode(IRSensor1, INPUT);
pinMode(IRSensor2, INPUT);
pinMode(IRSensor3, INPUT);
pinMode(IRSensor4, INPUT);
//Google Maps
Particle.subscribe("LeaderS1", loop);
Particle.subscribe("LeaderS1NoObject", loop2);
//Particle.subscribe("LeaderSensor1", myHandler, ALL_DEVICES);
Serial.begin(9600);
//locator.withLocatePeriodic(30);
}
void loop(const char *event, const char *data)
{
//Try analog Read Tommorow if this still does not work
Sensor1 = digitalRead(IRSensor1);
Sensor2 = digitalRead(IRSensor2);
Sensor3 = digitalRead(IRSensor3);
Sensor4 = digitalRead(IRSensor4);
if (Sensor3 == 1)
{
Particle.publish("RS3NoObject", "NoObject");
delay(3000);
}
if (Sensor1 == 1 && Sensor2 == 1 && Sensor3 == 0 && Sensor4 == 1)
{
//Particle.publish("Swarm Mates Found", PUBLIC);
digitalWrite(IN2, LOW);
digitalWrite(IN1, HIGH);
analogWrite(SPEEDPINA, 255);
digitalWrite(IN4, LOW);
digitalWrite(IN3, HIGH);
analogWrite(SPEEDPINB, 255);
}
else
{
StopAll();
}
}
void loop2(const char *event, const char *data)
{
StopAll();
}
void StopAll()
{
digitalWrite(IN1, LOW);
digitalWrite(IN2, LOW);
digitalWrite(IN3, LOW);
digitalWrite(IN4, LOW);
analogWrite(SPEEDPINA, 100);
analogWrite(SPEEDPINB, 100);
}
/*void SensorTest()
{
if (Sensor1 == 1 && Sensor2 == 1 && Sensor3 == 1 && Sensor4 == 1)
{
Particle.publish("No Object", PUBLIC);
digitalWrite(IN1, HIGH);
digitalWrite(IN2, LOW);
analogWrite(SPEEDPINA, 150);
delay(2000);
digitalWrite(IN1, LOW);
digitalWrite(IN2, LOW);
}
//<<<<<<<<<<<<<<<<<<<Object Detected on 4 Sensors>>>>>>>>>>>>>>>>>>>>>>>>>>>
else if (Sensor1 == 0 && Sensor2 == 0 && Sensor3 == 0 && Sensor4 == 0)
{
Particle.publish("Object detected on All Sensors 1,2,3,4" , PUBLIC);
}
//<<<<<<<<<<<<<<<<<<<<Object Detected on Three Sensors >>>>>>>>>>>>>>>>>>>>>
else if (Sensor1 == 0 && Sensor2 == 0 && Sensor3 == 0 && Sensor4 == 1)
{
Particle.publish("Object detected on Sensor 1,2,3" , PUBLIC);
}
else if (Sensor1 == 0 && Sensor2 == 0 && Sensor3 == 1 && Sensor4 == 4)
{
Particle.publish("Object detected on Sensor 1,2,4" , PUBLIC);
}
else if (Sensor1 == 0 && Sensor2 == 1 && Sensor3 == 0 && Sensor4 == 0)
{
Particle.publish("Object detected on Sensor 1,3,4" , PUBLIC);
}
else if (Sensor1 == 1 && Sensor2 == 0 && Sensor3 == 0 && Sensor4 == 0)
{
Particle.publish("Object detected on Sensor 2,3,4" , PUBLIC);
}
//<<<<<<<<<<<<<<<<<<<<<<Object Detected on two sensors>>>>>>>>>>>>>>>>>>>>>>>>
//Sensor 1
else if (Sensor1 == 0 && Sensor2 == 0 && Sensor3 == 1 && Sensor4 == 1)
{
Particle.publish("Object detected on Sensor 1 and 2" , PUBLIC);
}
else if (Sensor1 == 0 && Sensor2 == 1 && Sensor3 == 0 && Sensor4 == 1)
{
Particle.publish("Object detected on Sensor 1 and 3" , PUBLIC);
}
else if (Sensor1 == 0 && Sensor2 == 1 && Sensor3 == 1 && Sensor4 == 0)
{
Particle.publish("Object detected on Sensor 1 and 4" , PUBLIC);
}
//Sensor 2
else if (Sensor1 == 1 && Sensor2 == 0 && Sensor3 == 0 && Sensor4 == 1)
{
Particle.publish("Object detected on Sensor 2 and 3" , PUBLIC);
}
else if (Sensor1 == 1 && Sensor2 == 0 && Sensor3 == 1 && Sensor4 == 0)
{
Particle.publish("Object detected on Sensor 2 and 4" , PUBLIC);
}
//Sensor 3
else if (Sensor1 == 1 && Sensor2 == 1 && Sensor3 == 0 && Sensor4 == 0)
{
Particle.publish("Object detected on Sensor 3 and 4" , PUBLIC);
}
//<<<<<<<<<<<<<<<<<<<<<Object Detected on Single Sensor>>>>>>>>>>>>>>>>>>>>>>>
else if (Sensor1 == 0 && Sensor2 == 1 && Sensor3 == 1 && Sensor4 == 1)
{
Particle.publish("Object detected on sensor 1", PUBLIC);
}
else if (Sensor1 == 1 && Sensor2 == 0 && Sensor3 == 1 && Sensor4 == 1)
{
Particle.publish("Object detected on sensor 2", PUBLIC);
}
else if (Sensor1 == 1 && Sensor2 == 1 && Sensor3 == 0 && Sensor4 == 1)
{
Particle.publish("Object detected on sensor 3", PUBLIC);
}
else if (Sensor1 == 1 && Sensor2 == 1 && Sensor3 == 1 && Sensor4 == 4)
{
Particle.publish("Object detected on sensor 4", PUBLIC);
}
}
void SensorFinder()
{
if (Sensor1 == 0)
{
digitalWrite(IN2, LOW);
digitalWrite(IN1, HIGH);
analogWrite(SPEEDPINA, 150);
digitalWrite(IN4, LOW);
digitalWrite(IN3, HIGH);
analogWrite(SPEEDPINB, 150);
}
//Nothing dont go
if (Sensor1 == 1)
{
digitalWrite(IN2, LOW);
digitalWrite(IN1, LOW);
digitalWrite(IN4, LOW);
digitalWrite(IN3, LOW);
}
//Object go
//Sensor 2
if (Sensor2 == 0)
{
digitalWrite(IN2, LOW);
digitalWrite(IN1, HIGH);
analogWrite(SPEEDPINA, 150);
digitalWrite(IN4, LOW);
digitalWrite(IN3, HIGH);
analogWrite(SPEEDPINB, 150);
}
//Nothing dont go
if (Sensor2 == 1)
{
digitalWrite(IN2, LOW);
digitalWrite(IN1, LOW);
digitalWrite(IN4, LOW);
digitalWrite(IN3, LOW);
}
//Sensor3
if (Sensor3 == 0)
{
digitalWrite(IN2, LOW);
digitalWrite(IN1, HIGH);
analogWrite(SPEEDPINA, 150);
digitalWrite(IN4, LOW);
digitalWrite(IN3, HIGH);
analogWrite(SPEEDPINB, 150);
}
//Nothing dont go
if (Sensor3 == 1)
{
digitalWrite(IN2, LOW);
digitalWrite(IN1, LOW);
digitalWrite(IN4, LOW);
digitalWrite(IN3, LOW);
}
//Sensor 4
if (Sensor4 == 0)
{
digitalWrite(IN2, LOW);
digitalWrite(IN1, HIGH);
analogWrite(SPEEDPINA, 150);
digitalWrite(IN4, LOW);
digitalWrite(IN3, HIGH);
analogWrite(SPEEDPINB, 150);
}
//Nothing dont go
if (Sensor4 == 1)
{
digitalWrite(IN2, LOW);
digitalWrite(IN1, LOW);
digitalWrite(IN4, LOW);
digitalWrite(IN3, LOW);
}
}
*/
//Device ID - 270035000147373336323230
//Accesss Token - bee763562c709a8cec07705008beb1e4f8372e38


Comments