

* update: uploaded STLs *
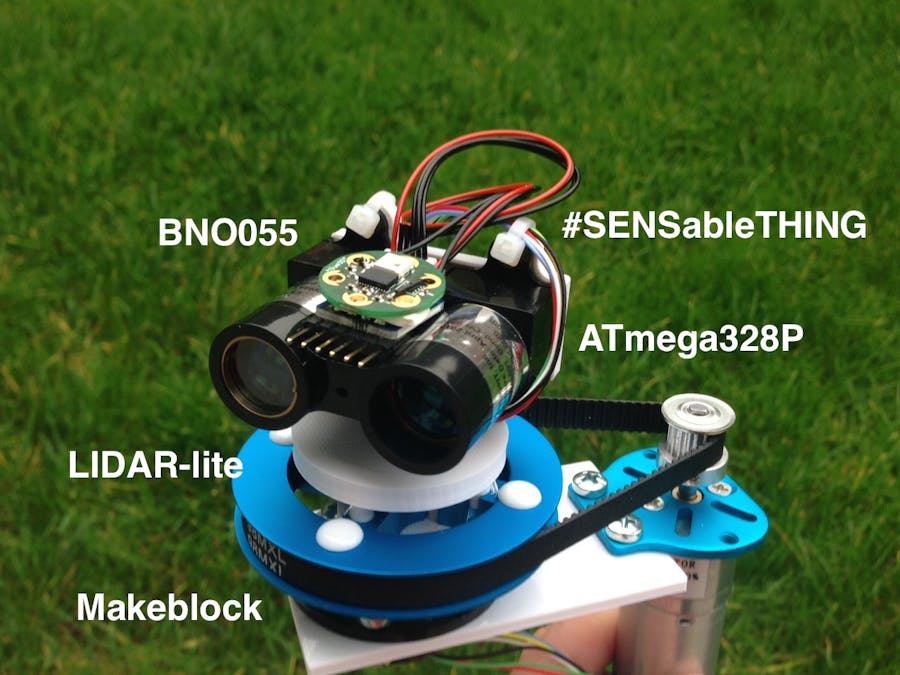
Playing with the awesome LiDAR-lite from Pulsed Light, I wondered if we can add my pico-Platinchen with build in 9DOF and and ATmega328P with Arduino(TM) boot loader to build an absolute orientation aware LiDAR ... the answer is yes! Now we can measure laser sharp distance but also orientation of the laser beam.
New to LiDAR? check: https://en.wikipedia.org/wiki/Lidar
With that we can measure the orientation in 3D space (heading, roll, pitch) plus a laser range measurement - allowing tones of new projects:
- Drone anti-collision system!
- Enough space to go under the bridge?
- Somebody entered a room?
- Autonomous vehicles
- 3D scan anything ...
...
The tiny pico-Platinchen allows to use the Arduino(TM) IDE plus all the libraries for BNO055 (9DOF) as well the I2C libraries for the LiDAR-lite. 15 minutes and the LIDAR was tuned!
There is the need of an 5V to 3.3V regulator for pico-Platinchen ... the LiDAR and DC motor runs on 5V ... all the sensors BNO55 and LiDAR are on the I2C bus which is 3.3V signal level. No additional level shifter needed!
Hope you like the idea and please add your ideas in the comments below!









Comments