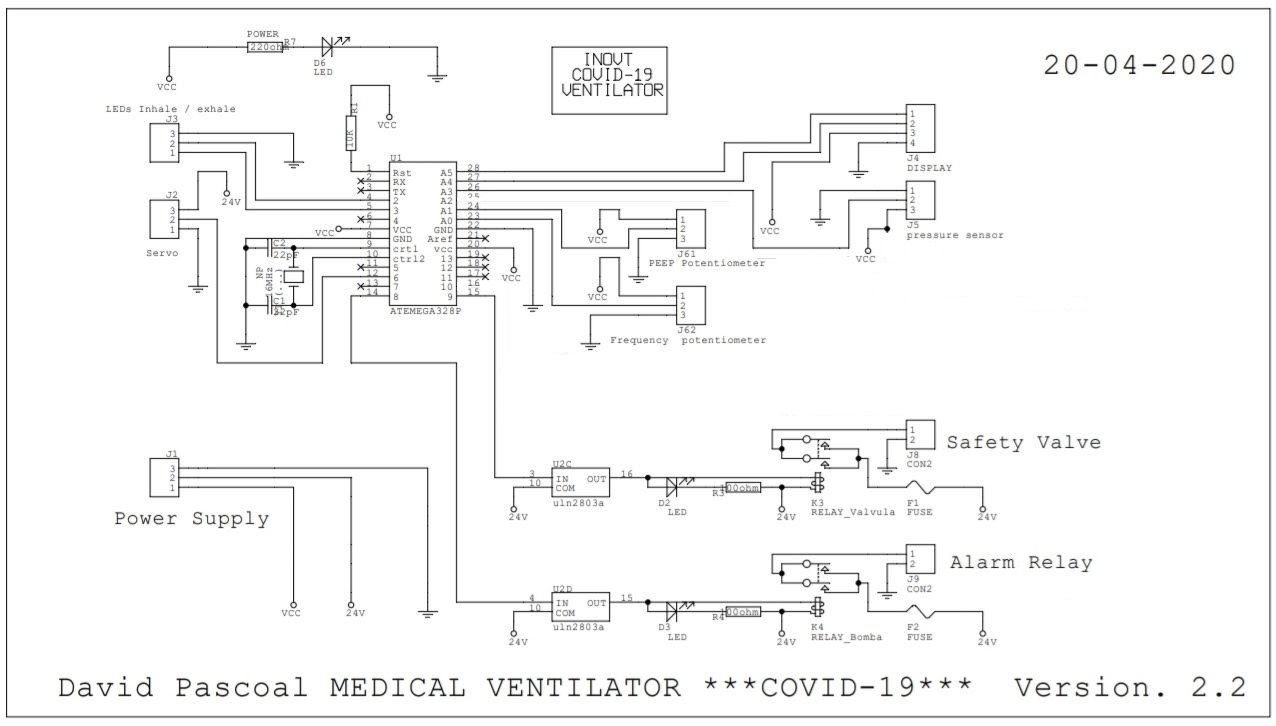
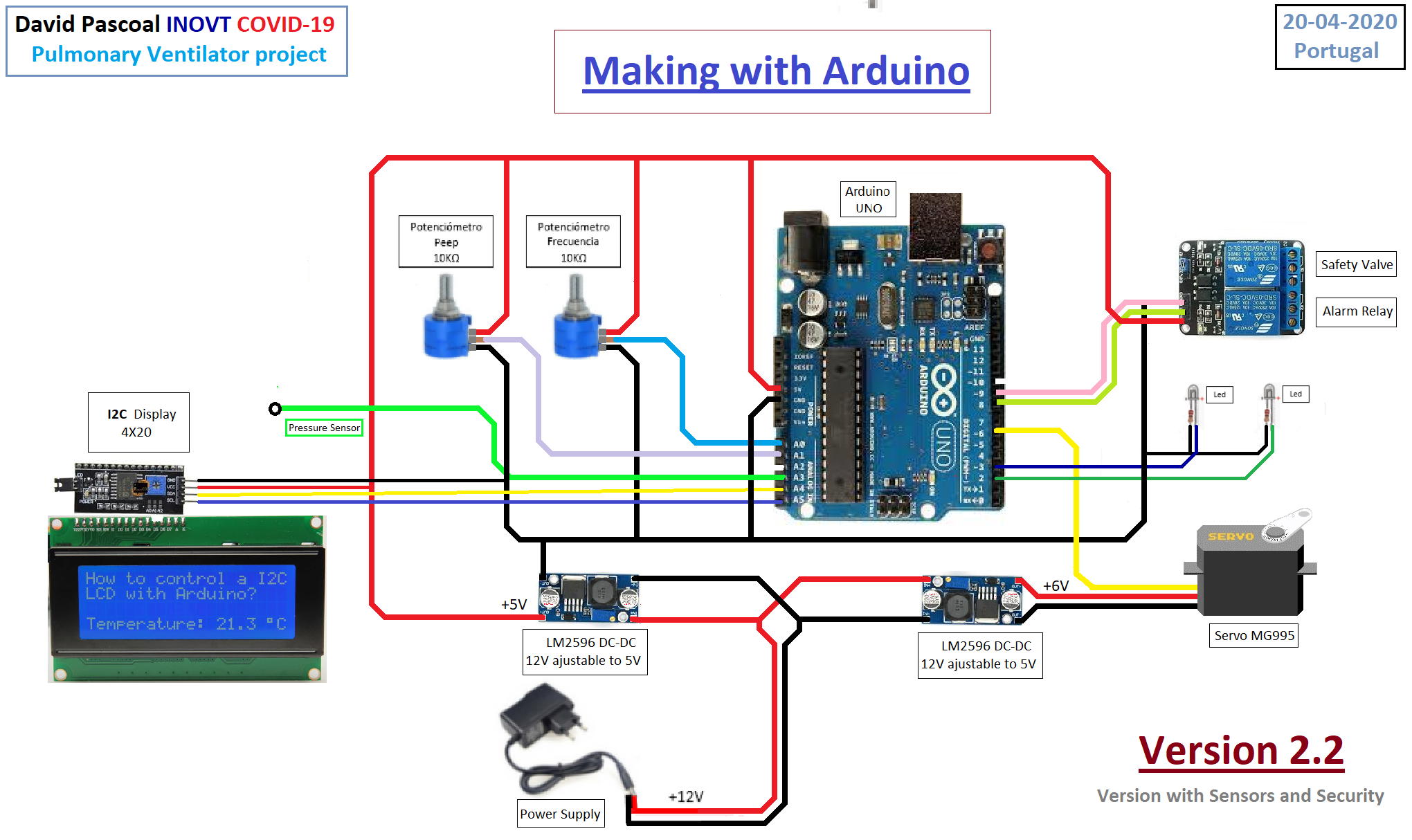
/* Program pulmonary ventilator INOVT COVID-19 Versio 2.2
* Autor: David Pascoal
* The equipment has been tested and proven,security with pressure sensor,
* Alarm output to turn on Buzer or beetle.
*/
#include <Wire.h>
#include <LiquidCrystal_I2C.h>
#include <Servo.h>
LiquidCrystal_I2C lcd(0x27,20,4);
#define PIN_SERVO 6
#define PIN_FREQ A1
#define PIN_PEEP A0
#define PIN_LED 2
#define PIN_LED2 3
#define PIN_Alarm_Relay 8
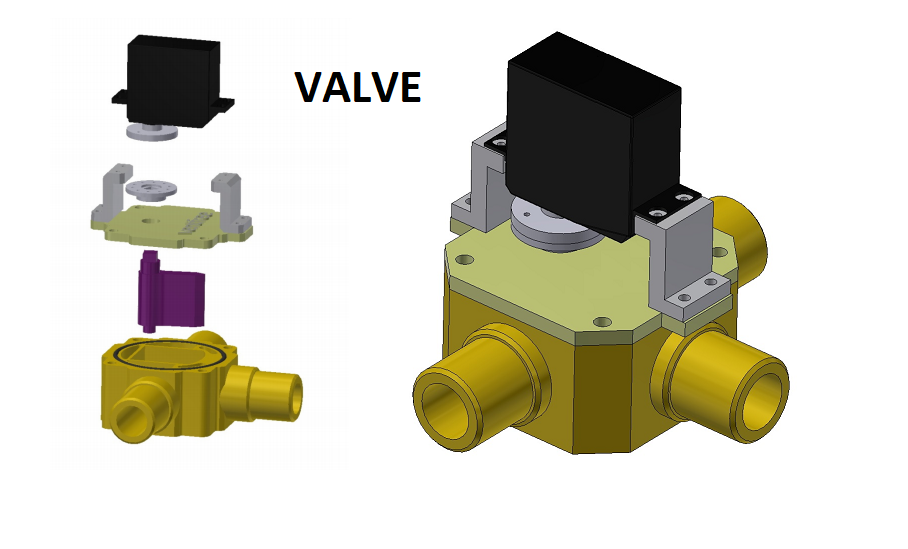
#define PIN_Safety_Valve 9
#define SENSOR_FLOW A3
#define EXPIRANDO 0
#define INSPIRANDO 1
#define MIN_ANGLE 92
#define MAX_ANGLE 139
int frecuencia = 0;
int valInspira = 0;
int valExpira = 0;
int valPeep = 0;
int aux;
int x = 500;
int y = 1000;
unsigned long time;
Servo myServo;
int frecuencia_ant;
int valPeep_ant;
int estado;
void logo()
{
byte a3[8]= { B00011,
B00111,
B01100,
B11000,
B10000,
B00000,
B00000
};
byte a2[8]= {B00000,
B00000,
B00000,
B00000,
B10001,
B11111,
B01110
};
byte a1[8]={B11000,
B01100,
B00110,
B00011,
B00001,
B00000,
B00000
};
byte a4[9]={ B00000,
B00000,
B00000,
B00001,
B00011,
B00110,
B01100,
B11000
};
byte a5[9]={ B00000,
B01110,
B11111,
B10001,
B00000,
B00000,
B00000,
B01110,
B00000,
};
byte a6[8]={ B00000,
B00000,
B00000,
B10000,
B11000,
B01100,
B00110,
B00011
};
byte a7[10]={ B00000,
B01110,
B11111,
B10001,
B00000,
B00000,
B00000,
B00000,
};
byte a8[8]={B00100,
B01110,
B00100,
B00000,
B10001,
B11111,
B01110
};
lcd.print("*COVID19*");
lcd.setCursor(0,1);
lcd.print("..INOVT..");
lcd.createChar(0,a1);
lcd.createChar(1,a2);
lcd.createChar(2,a3);
lcd.createChar(7,a8);
lcd.createChar(3,a4);
lcd.createChar(4,a5);
lcd.createChar(5,a6);
lcd.createChar(6,a7);
lcd.setCursor(10,0);
lcd.write(byte(3));
lcd.write(byte(4));
lcd.write(byte(5));
lcd.write(byte(3));
lcd.write(byte(6));
lcd.write(byte(5));
lcd.setCursor(10,1);
lcd.write(byte(0));
lcd.write(byte(1));
lcd.write(byte(2));
lcd.write(byte(0));
lcd.write(byte(7));
lcd.write(byte(2));
}
void initior() {
byte c11[8] = {
B00000,
B00000,
B11111,
B11111,
B11111,
B11111,
B00000,
B00000
};
lcd.createChar(3, c11);
lcd.setCursor(0, 2);
lcd.write(3);
delay(x);
lcd.setCursor(1, 2);
lcd.write(3);
delay(x);
digitalWrite(PIN_LED,HIGH);
lcd.setCursor(2, 2);
lcd.write(3);
delay(x);
lcd.setCursor(3, 2);
lcd.write(3);
delay(x);
digitalWrite(PIN_LED2,HIGH);
lcd.setCursor(4, 2);
lcd.write(3);
delay(x);
lcd.setCursor(5, 2);
lcd.write(3);
delay(x);
digitalWrite(PIN_LED,LOW);
lcd.setCursor(6, 2);
lcd.write(3);
delay(x);
lcd.setCursor(7, 2);
lcd.write(3);
delay(x);
digitalWrite(PIN_LED2,LOW);
lcd.setCursor(8, 2);
lcd.write(3);
delay(x);
digitalWrite(PIN_LED,HIGH);
digitalWrite(PIN_LED2,HIGH);
lcd.setCursor(9, 2);
lcd.write(3);
delay(x);
myServo.write(100);
digitalWrite(PIN_LED,LOW);
digitalWrite(PIN_LED2,LOW);
lcd.setCursor(10, 2);
lcd.write(3);
delay(x);
digitalWrite(PIN_LED,HIGH);
digitalWrite(PIN_LED2,HIGH);
lcd.setCursor(11, 2);
lcd.write(3);
delay(x);
myServo.write(110);
digitalWrite(PIN_LED,LOW);
digitalWrite(PIN_LED2,LOW);
lcd.setCursor(12, 2);
lcd.write(3);
delay(x);
digitalWrite(PIN_LED,HIGH);
digitalWrite(PIN_LED2,HIGH);
lcd.setCursor(13, 2);
lcd.write(3);
delay(x);
myServo.write(115);
digitalWrite(PIN_LED,LOW);
digitalWrite(PIN_LED2,LOW);
lcd.setCursor(14, 2);
lcd.write(3);
delay(x);
digitalWrite(PIN_LED,HIGH);
digitalWrite(PIN_LED2,HIGH);
lcd.setCursor(15, 2);
lcd.write(3);
delay(x);
myServo.write(120);
digitalWrite(PIN_LED,LOW);
digitalWrite(PIN_LED2,LOW);
lcd.setCursor(16, 2);
lcd.write(3);
delay(x);
digitalWrite(PIN_LED,HIGH);
digitalWrite(PIN_LED2,HIGH);
lcd.setCursor(17, 2);
lcd.write(3);
delay(x);
myServo.write(130);
digitalWrite(PIN_LED,LOW);
digitalWrite(PIN_LED2,LOW);
lcd.setCursor(18, 2);
lcd.write(3);
delay(x);
lcd.setCursor(19, 2);
lcd.write(3);
delay(x);
}
void maobc() {
thumbdownA();
delay(x);
lcd.clear();
thumbsup();
delay(x);
thumbdownA();
delay(x);
lcd.clear();
thumbsup();
delay(x);
thumbdownA();
delay(x);
lcd.clear();
thumbsup();
delay(x);
thumbdownA();
delay(x);
lcd.clear();
thumbsup();
delay(1000);
lcd.clear();
}
void thumbdownA() {
byte thumb1[8] = {B00001,B00010,B00011,B00100,B00011,B00100,B00011,B00100};
byte thumb2[8] = {B00011,B00000,B00000,B00000,B00000,B00000,B00000,B00000};
byte thumb3[8] = {B11110,B00001,B00000,B00000,B00000,B00000,B00000,B00000};
byte thumb4[8] = {B00000,B11110,B01000,B10001,B10010,B10010,B01100,B00000};
byte thumb5[8] = {B00000,B10000,B01110,B00010,B00010,B00010,B00010,B00010};
byte thumb6[8] = {B00110,B01000,B10000,B00000,B00000,B00000,B00000,B00000};
lcd.createChar(6, thumb1);
lcd.createChar(1, thumb2);
lcd.createChar(2, thumb3);
lcd.createChar(3, thumb4);
lcd.createChar(4, thumb5);
lcd.createChar(5, thumb6);
lcd.setCursor(7,0);
lcd.write(6);
lcd.setCursor(7,1);
lcd.write(1);
lcd.setCursor(8,0);
lcd.write(2);
lcd.setCursor(8,1);
lcd.write(3);
lcd.setCursor(9,0);
lcd.write(4);
lcd.setCursor(9,1);
lcd.write(5);
}
void thumbsup() {
byte thumb1[8] = {B00100,B00011,B00100,B00011,B00100,B00011,B00010,B00001};
byte thumb2[8] = {B00000,B00000,B00000,B00000,B00000,B00000,B00000,B00011};
byte thumb3[8] = {B00000,B00000,B00000,B00000,B00000,B00000,B00001,B11110};
byte thumb4[8] = {B00000,B01100,B10010,B10010,B10001,B01000,B11110,B00000};
byte thumb5[8] = {B00010,B00010,B00010,B00010,B00010,B01110,B10000,B00000};
byte thumb6[8] = {B00000,B00000,B00000,B00000,B00000,B10000,B01000,B00110};
lcd.createChar(6, thumb1);
lcd.createChar(1, thumb2);
lcd.createChar(2, thumb3);
lcd.createChar(3, thumb4);
lcd.createChar(4, thumb5);
lcd.createChar(5, thumb6);
lcd.setCursor(7,1);
lcd.write(6);
lcd.setCursor(7,0);
lcd.write(1);
lcd.setCursor(8,1);
lcd.write(2);
lcd.setCursor(8,0);
lcd.write(3);
lcd.setCursor(9,1);
lcd.write(4);
lcd.setCursor(9,0);
lcd.write(5);
}
void setServo()
{
if ( millis() > time )
{
if ( estado == EXPIRANDO )
{
// Pasar a inspirandO
digitalWrite(PIN_LED2,LOW);
digitalWrite(PIN_LED,HIGH);
myServo.write(MIN_ANGLE);
time = millis() + (valInspira * 100);
estado = INSPIRANDO;
lcd.setCursor(8, 2);
lcd.print("EXPIRANDO > ");
}
else if ( estado == INSPIRANDO )
{
// P0asar a expirando
digitalWrite(PIN_LED2,HIGH);
digitalWrite(PIN_LED,LOW);
myServo.write(MAX_ANGLE - valPeep);
time = millis() + (valExpira * 100);
estado = EXPIRANDO;
lcd.setCursor(8, 2);
lcd.print("INSPIRANDO < ");
}
}
}
void setup()
{
myServo.attach(PIN_SERVO);
myServo.write(92);
//digitalWrite(PIN_LED,LOW);
pinMode(PIN_FREQ,INPUT_PULLUP);
pinMode(PIN_PEEP,INPUT_PULLUP);
pinMode(SENSOR_FLOW,INPUT);
pinMode(PIN_LED,OUTPUT);
pinMode(PIN_LED2,OUTPUT);
pinMode(PIN_Alarm_Relay,OUTPUT);
pinMode(PIN_Safety_Valve,OUTPUT);
lcd.init();
lcd.backlight();
lcd.clear();
lcd.setCursor(0,0);
logo();
lcd.setCursor(4,2);
lcd.print("OPEN-SOURCE");
lcd.setCursor(0,3);
lcd.print("Pulmonary Ventilator");
delay(4000);
lcd.clear();
lcd.print("....Initializing....");
initior();
delay(500);
lcd.clear();
maobc();
lcd.clear();
if(digitalRead(SENSOR_FLOW) == LOW)
{
thumbsup();
lcd.setCursor(0,0);
lcd.print("SYSTEM");
lcd.setCursor(2,1);
lcd.print("OK");
delay(5000);
lcd.clear();
}
else
{
myServo.write(139);
thumbdownA();
lcd.setCursor(0,0);
lcd.print("SYSTEM");
lcd.setCursor(1,1);
lcd.print("FAIL");
delay(5000);
lcd.clear();
Serial.begin(9600);
time = millis();
frecuencia_ant=-1;
valPeep_ant=-1; }
delay(500);
estado=EXPIRANDO;
}
void loop()
{
digitalRead(SENSOR_FLOW);
aux = analogRead(PIN_FREQ);
frecuencia = map(aux,0,1023, 10, 60);
valInspira = ((1.0 / frecuencia )* 600.0 ) * (1.0/3.0);
valExpira = ((1.0 / frecuencia ) * 600.0 ) * (2.0/3.0);
aux = analogRead(PIN_PEEP);
valPeep = map(aux,0,1023, 0, 10);
if ( (frecuencia_ant != frecuencia) || (valPeep_ant != valPeep))
{
//Pode monitorizar os valores de Frequencia e PEEP sem display usando o Monitor serie do Arduino IDE.
Serial.print("Frecuencia: ");
Serial.println(frecuencia);
Serial.print("Inspira: ");
Serial.println(valInspira);
Serial.print("Expira: ");
Serial.println(valExpira);
Serial.print("Peep: ");
Serial.println(valPeep);
lcd.setCursor(1, 0);
lcd.print("FREQUENCIA: ");
lcd.setCursor(13, 0);
lcd.print(frecuencia);
lcd.setCursor(1, 1);
lcd.print("PEEP: ");
lcd.setCursor(13, 1);
lcd.print(valPeep);
// delay(500);
lcd.setCursor(0, 2);
lcd.print("ESTADO: ");
lcd.setCursor(0, 3);
lcd.print("VENTILADOR D.PASCOAL ");
frecuencia_ant = frecuencia;
valPeep_ant = valPeep;
}
if(digitalRead(SENSOR_FLOW) == HIGH)
{
myServo.write(139);
digitalWrite(PIN_Alarm_Relay,HIGH);
digitalWrite( PIN_Safety_Valve,HIGH);
lcd.clear();
thumbdownA();
lcd.setCursor(0,0);
lcd.print("SYSTEM");
lcd.setCursor(1,1);
lcd.print("FAIL");
lcd.setCursor(1,2);
lcd.print("******************");
lcd.setCursor(3,3);
lcd.print("Check AR flow");
lcd.setCursor(12,1);
lcd.print("ALARM");
digitalWrite(PIN_LED,HIGH);
digitalWrite(PIN_LED2,HIGH);
delay(500);
lcd.setCursor(12,1);
lcd.print(" ");
delay(500);
lcd.setCursor(12,1);
lcd.print("ALARM");
digitalWrite(PIN_LED,LOW);
digitalWrite(PIN_LED2,LOW);
delay(1000);
lcd.clear();
}
else
{
digitalWrite(PIN_Alarm_Relay,LOW);
digitalWrite( PIN_Safety_Valve,LOW);
setServo();
delay(10);
}
}

_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff)








_rNYz5JUz3q.jpg)


_t9PF3orMPd.png?auto=compress%2Cformat&w=40&h=40&fit=fillmax&bg=fff&dpr=2)





{kind=link}
_rNYz5JUz3q.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
Comments