


Hardware components | ||||||
 |
| × | 2 | |||
 |
| × | 4 | |||
Software apps and online services | ||||||
 |
| |||||
| ||||||
Hand tools and fabrication machines | ||||||
 |
| |||||
 |
| |||||
 |
| |||||
For this project, I used a Photon 2 microcontroller to pull real-time data from a government API about how many kids are being transferred out of U.S. border facilities each day. The data gets sent to the Photon through a webhook, and my code figures out how many kids were moved that day.
Depending on the number, two servo motors rotate to show whether the number is low, medium, or high. It’s a way to take the immigration stats and turn it into something you can actually see and interact with using my partners sculpture.
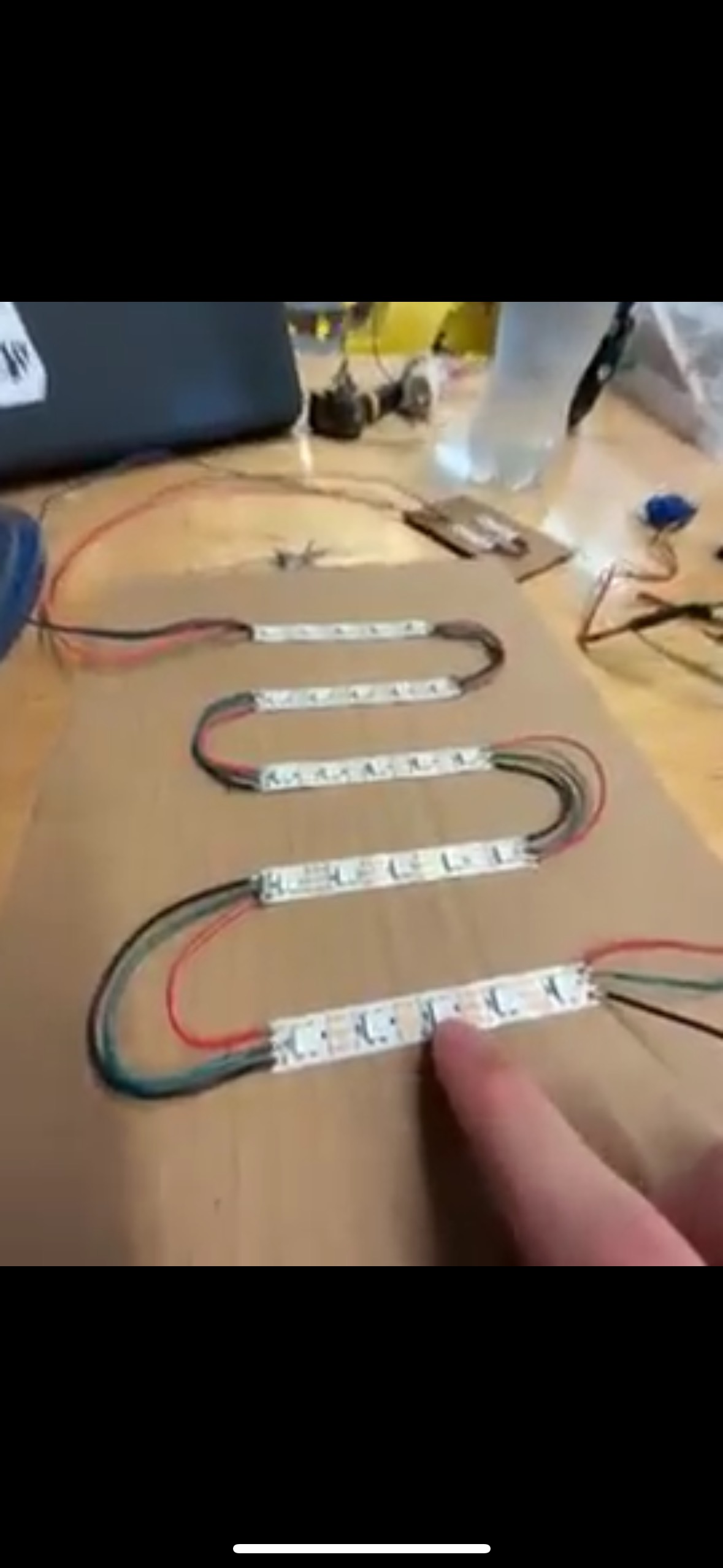
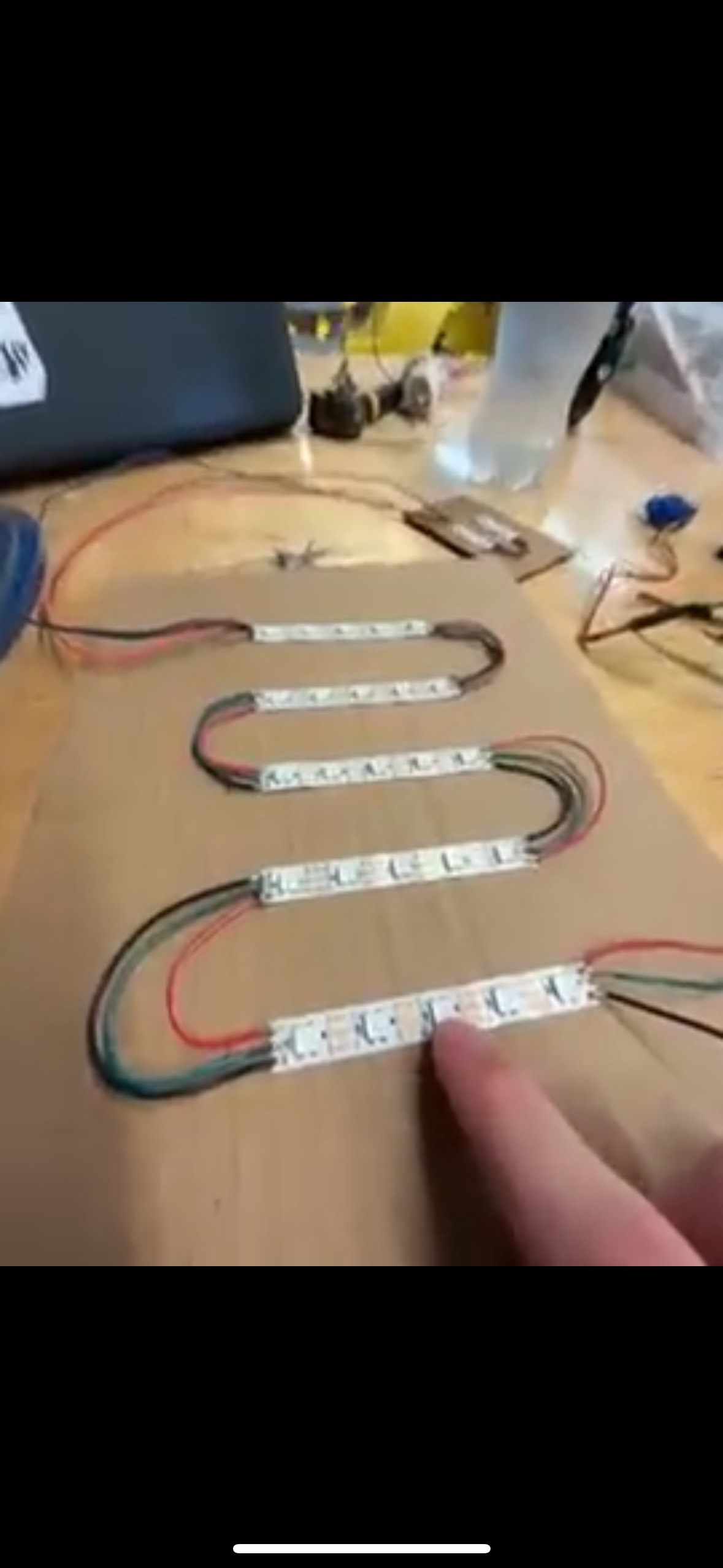
I will say, I was unable to get the lights to work which would've represented the total amount of children in custody with led light strips lighting up through holes in the floor.
While the enclosure may look somewhat barren, this is the sad reality of the containment facilities where the unaccompanied minors are held. It is literally a metal cage with nothing inside except mattresses and thermal blankets( the tin foil).
Here are the 4 stages of my project which change based off the HHS data:
First pircture is representing the gates closed meaning no children were apprehended:
This second picture represents when the ammount of children is under 5:
Third picture represents when the ammount of children is equal or greater than 5 but less than 30:
The fourth picture represents when the ammount of children is greater than 29:
Enclosure





_3u05Tpwasz.png?auto=compress%2Cformat&w=40&h=40&fit=fillmax&bg=fff&dpr=2)
{kind=link}
{kind=link}
{kind=link}
Comments