

Hardware components | ||||||
_baVEVgguW1.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff) |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
Software apps and online services | ||||||
| ||||||
 |
| |||||
Hand tools and fabrication machines | ||||||
 |
| |||||
The Sandy River Delta is located near Troutdale, OR at the Confluence of the Sandy River, and the Columbia River. The “Delta” recreational site is East of the main stem of the Sandy River, North of the I-84 freeway, and bounded to the North by the Columbia River. Also known as 1000 Acres it is large enough for a good multi-hour outing only 20 minutes from downtown Portland.
The Delta is a mixed use / Multi user accessible area and is part of the Columbia River Gorge National Scenic Area and also has a closed to Protect Wildlife Habitat.
It is a multi-use area open for all types of non-motorized recreational activities including Hunting, Fishing, Horse Riding, Dog Walking, Cycling, and just a great place to be out in Nature.
As a multi use area, it is important that all users respect the area and other users. Despite appearances, the Delta is not a “Dog Park”. Dog walkers should be aware of the other users of the area, and likewise, other users should be aware of the presence of off-leash dogs.
I chose this category because I am a nature lover and conservation actions look great to me. I hope I can help.
I am currently working with the Arduino 101 board and its potential to give it connectivity to the objects of daily life by means of bluetooth low energy.
I did an investigation about the place on the website:
http://envirogorge.com/sandy-river-delta/
In these web pages I found information about the history of the place, its climate, the activities that are carried out and geographic information.
The flora and fauna of the place can be checked in the following document:
http://sandyriver.org/wp/wp-content/uploads/Sandy-River-Species-Guide.pdf
Because the area is visited daily by many people, the problem I observe is that the level of waste and trash control has to be too low, and I want to improve that aspect. Garbage around the world has been a problem that generates many environmental damages. And the goal is to protect the species that live there.
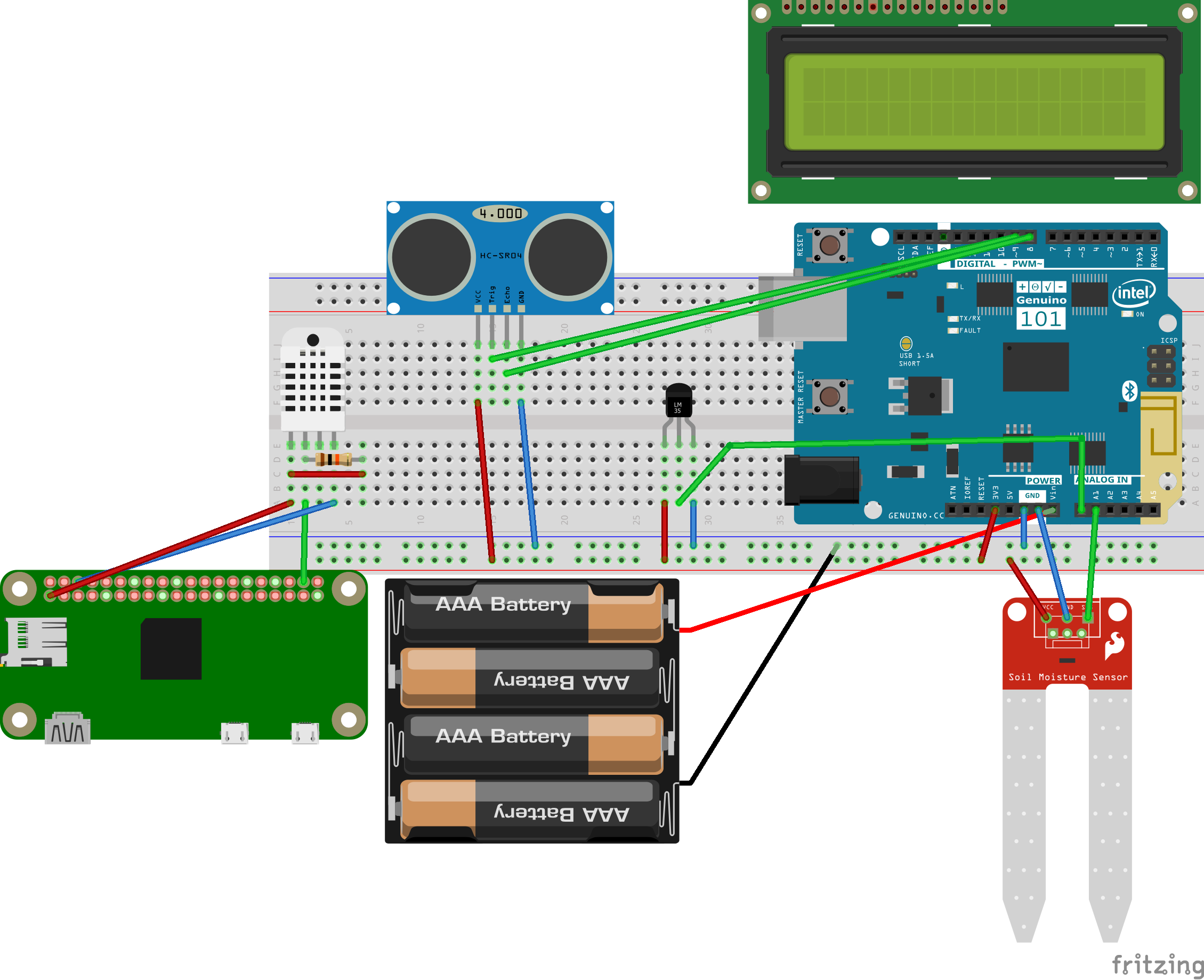
The prototype I want to develop is a trash can with low energy bluetooth connectivity that provides data such as garbage level, meteorological data such as temperature, soil moisture, boat orientation status data to a central hub in My case is a raspberry pi zero w connected with the Blynk platform. We created an application for smart phones where you can observe the state of the sensors and also offers notifications depending on the state of the sensors. The main objective is that when the level of the trash can has a level of trash to the maximum, this sends a notification to all the users of the application and they make the collection and the cleaning of the place. Thus the place will remain in optimal conditions for the flora, the fauna and the visitors.
Above I show the diagram of my prototype, at the end I could only build a trash can because of the lack of components and arduino 101 boards, but making one is enough to show that it works.
Material1. SparkFun Inventor's Kit for Arduino 101
This material was given to me by the sponsors of the contest, I thank you for the trust and support. This material contains the plate you use and the temperature sensor TMP36 that I use to measure the temperature.
To test the circuits you were using, use the Arduino and Breadboard Holder. The arduino 101.
2. Grove Shield
This shield is perfect for prototyping and connecting components exclusive to the Grove platform.
3. Grove LCD I2C
This screen can be connected through the I2C port of the Arduino 101 and you can change the color of the lighting and it has a very nice design.
4. Raspberry pi zero w
This board has all the advantages of raspberry pi zero but with the addition of bluetooth 4.0 connectivity and wi-fi, use it to receive arduino sensor values by means of bluetooth. Programming in Node Js was a very enjoyable, intuitive and effective experience.
5. DHT22
This digital sensor of humidity and temperature is very used and has good results, this one uses it to measure the temperature and humidity near the central device that is the raspberry pi zero w.
6. Ultrasonic sensor
This sensor I used to measure the level of trash in the trash can, had good results, but probably in an update can be changed by a sensor or infrared sensor in my opinion seem more reliable but in my country it is difficult to achieve components as sensors.
7. Moisture sensor
This sensor used it to measure the level of humidity in the earth, any high reading of humidity means that there could be rain or some flood and that could be a problem for the garbage of that place, sends a warning to the application.
8. Solar battery bank
Any project needs power, my prototype I put this power bank of 12000mAh, which also recharges solar, ideally would have a panel built especially for my prototype. But this device worked great. I used 2 for raspberry pi zero w and arduino 101 in my smart trash can.
9. Arduino 101 6-Axis Acelerometer and Gyroscope
To know if my trash can had fallen, or someone threw it on the floor. Use the accelerometer and gyroscope included in the Arduino 101. It was easy to implement and send the data to the central base.
ResultsIn the physical aspect of the prototype I will show some images and explain the why of each thing. Below we have the top of the trash can that has the LCD grove that has a nice message for people who use it and leave their waste and also has as information the time and a word, "ON" which means that the system is Connected to the central unit which is the raspberry pi zero wy "OFF" means that it is disconnected.
Below is the finished prototype, on the outside only the LCD is visible on the top and on the back you can see the power bank with its solar panel, so this device is autonomous and sustainable with the environment.
To prove that the arduino data was reaching the raspberry pi zero, I made the latter by programming in node JS, print the value of each sensor per console in Putty and below my results.
To implement the SMS notifications for my project I had to investigate on the internet a lot and everything I gathered in the tutorial in which I leave the link below.
https://www.hackster.io/alexis-santiago-allende/sms-alerts-for-arduino-101-ble-e7184d
Also to connect arduino 101 with the raspberry pi zero w by bluetooth of low energy carry out the following tutorial, in which I leave to information that I found and as I did the process. In this final project was to unite these two previous examples and make slight modifications to obtain the desired operation.
https://www.hackster.io/alexis-santiago-allende/arduino-101-connects-with-raspberry-pi-zero-w-63adc0
Blynk AppBelow you can see how the application looks aesthetically, at the top of the application you can see small boxes that are widgets, two of which enable notifications, one of them is the one that activates the events of the Blynk application and the Last is a bin viewer at the moment. In the central part you can see 4 very beautiful displays of temperature and humidity. One pair is from the arduino 101 and the other are from the raspberry pi zero w, with my prototype you can add more visualization widgets and more sensors but only use the ones that had available.
In the lower part you can see the trash level display next to 2 general purpose buttons. That could be used to control any item at a distance as lights from the central unit. The use of this hardware together with Blynk gives many possibilities.
There are two types of notifications implemented, notifications specific to the application and those that are through the Twilio SMS service. Here below we have the temperature notification, when the temperature is higher than a threshold, this sends a notification. In the project notification is also given when the trash can is full.
Notifications are also given when the central device is disconnected or there is a connection failure.
Apart from the notifications of the app, under the same cases, or if the previous notifications do not work, we have the notifications by SMS that in my opinion are more effective, below I leave the example of when the trash can is full.
NOTE:
In the schematic diagram I made in fritzing only left it with the components that I could find. It is very difficult to find all the components that I need. Fritzing is very useful but I hope to update your version with more components of different brands.
ConclusionsThis project fulfills the objectives with which it was designed, on the one hand it takes care of the environment and it is a question of handling the garbage with more care. And on the other hand these devices that always seem static and do not contribute anything else, can be used as data centers, you can add more sensors, such as atmospheric pressure, gas levels in the garbage (to determine if there is Gases toxic and dangerous for the environment and nature), light sensors and cameras to see nature and wildlife. I would have liked to put all those kind of sensors and special attachments, but that went out of my budget.
The physical design makes this look like a super-normal trash can, and that's great since it does not represent a strong modification to the Delta environment. The whole circuit was assembled on the lid so that leaves the trash can with the most amount of useful space.
The goal of the internet of things is to connect the things that are our daily life, now everything is useful and could give us important information or information to improve our lives.





_3u05Tpwasz.png?auto=compress%2Cformat&w=40&h=40&fit=fillmax&bg=fff&dpr=2)
{kind=link}
Comments