


Hardware components | ||||||
| × | 1 | ||||
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 1 | ||||
 |
| × | 1 | |||
 |
| × | 1 | |||
_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff) |
| × | 1 | |||
 |
| × | 1 | |||
| × | 1 | ||||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 1 | ||||
 |
| × | 1 | |||
Software apps and online services | ||||||
 |
| |||||
| ||||||
Below is a video that goes through all the steps to assembling and running the Arduino DIY Simple Bluetooth Controlled Solar Smart Security System for Home |Inspire Award Project
E-Mail-agarwalkrishna3009@gmail.com
IntroductionI have developed all in one smart home idea which help us to face difficulties in our daily life. It makes our work easier and provide us a very high security.
The main idea to build up this project is to use a renewable resource of energy solar panel and to get best level of security with auto on off detection information and many other The function is as under We can check and keep an eye of many things through our mobile by just connecting by Bluetooth The auto detection technology of the project help to determine day and night to on light automatically accordingly On mobile we will get alert about rain.
There is many level of security We can check the distance of people from our house or door to prevent robbery or any other consequences A buzzer will start beeping in different sound accordingly to level of danger We can also turn of and on many things as per our requirements This project help us to make our life easier
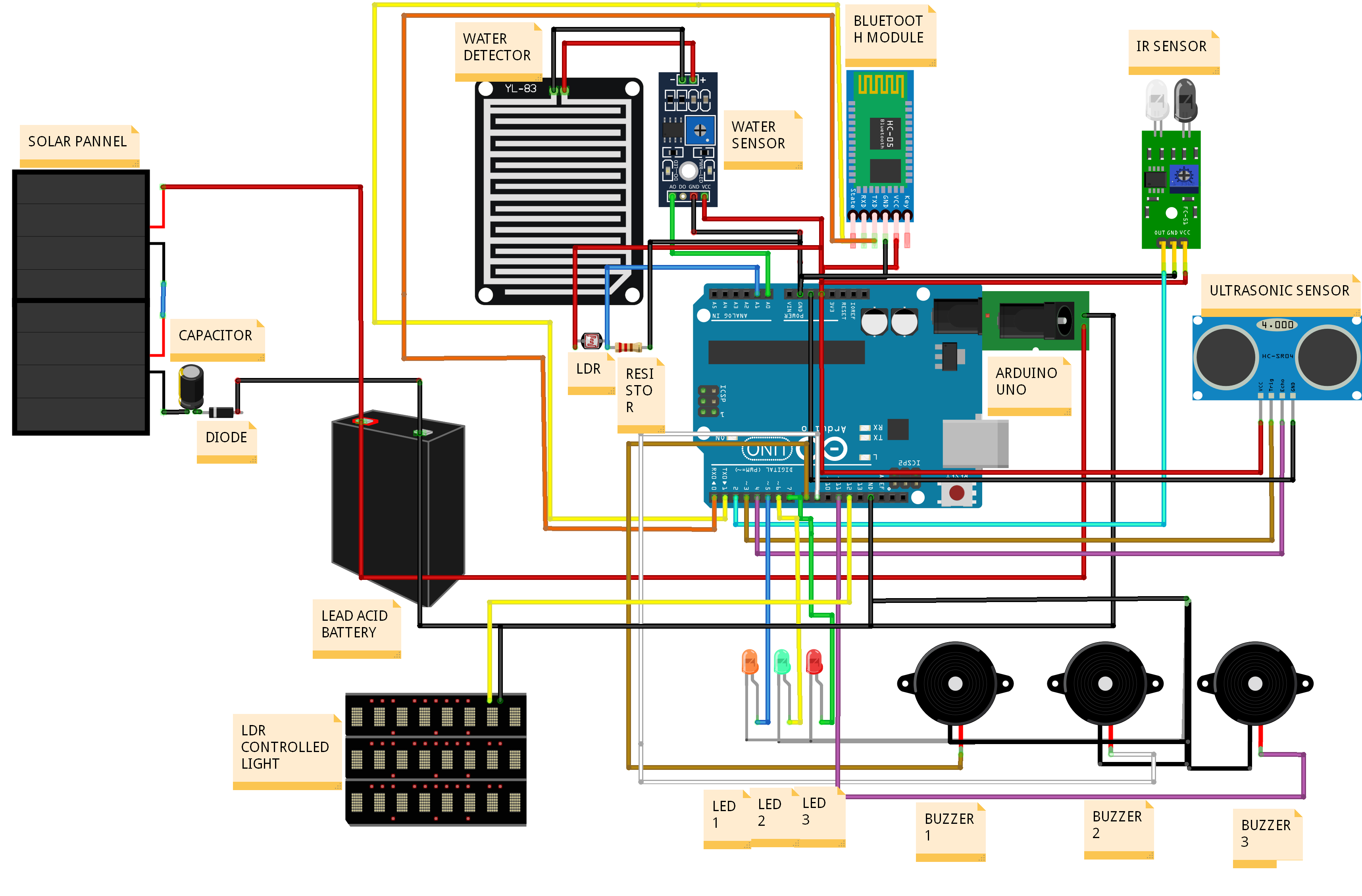
Working on BasicThe whole circuit is been powered Arduino UNO (Board) and Board is powered by Rechargeable Lead Acid Battery and that is powered by Solar Panel. It contains a code which uploaded to the board. And once it simulated you can start using your circuit
The main role of working the model is based on a renewable source of energy solar energy. Solar panel is responsible for whole working of the model.
Solar panel provide power to Lead acid battery through a capacitor followed with diode which help us to provide constant voltage and constant power and also to prevent reverse charging.
We can control the whole model by using our mobile by just connecting our phone Bluetooth with the Bluetooth module present in module.
We can easily turn on and off light control the activity of all the circuit when there is no need of Automatic Light we can turn of that feature. When there is no need of object or human detection we can easily turn it of. We can get the alert on our mobile of rain and object range.
Refer to this video there is full instruction CLICK HERE
There is Multiple Usage of this Project:-
1.Auto Charge for battery.
2.Over Charge Protection of battery.
3.24x7 power supply to the whole model no need of electricity.
4.Water Detection / Rain Detection by beeping up the buzzer and glowing up the light with included Bluetooth Alert (When Connected)
5.Autoon/ Off light Controlled by LDR sensor. It detect day and night automatically and switch on the light when there is darkness and turn’s of the light when there is brightness. This Feature can also turn off and LED’s can also controlled manually by connecting Bluetooth Easily.
6.Ir sensor detect object within a set range and start beeping when there is some object within the range and glow the desired LED also display alert on our mobile (When Connected)
7.Ultrasonic sensor is the range based sensor which can detect object till 400 cm or 4 meter or 13 feet. Which make different beeping sound according to the distance and start glowing the desired LED. Also displays the level of danger and object distance from the sensor.
Prototype Image'sVisit YOUTUBE for 360 Degree View of the Project
Ultrasonic Sensor is the most important part on the basis of security perspective. This sensor can detects object till range of 300 cm.
We have code the sensor in such a way if the object is within 75 cm so it will come Extreme risk along with Distance. If object is from 76 cm to 151 cm it will come High Risk along with distance. If object is from 152 cm to 227 cm it will come Medium Risk along with the distance and if the object is from 228 to 300 cm it will come Low risk along with distance.
There are led and buzzer attached for this sensor which will beep and blink in such a way according to the risk level. We can easily turn on and of this function by using our phone when there is no need of this function or feature.
Bluetooth Module WorkingBluetooth Module (HC-05) is the most important part on the model. This sensor will help us to control the whole project as well as this model will also help us in get different alert on our device by just connection device Bluetooth to it. This will connect with a app which will present in our phone known as Bluetooth Electronics and than it will work as desired. HC-05 has red LED which indicates connection status, whether the Bluetooth is connected or not. Before connecting to HC-05 module this red LED blinks continuously in a periodic manner. When it gets connected to any other Bluetooth device, its blinking slows down to two seconds
Rain Detection WorkingRain Detection help us to get alert about rain.
There are two component's in this detection one is metallic plate which help us to detect rain and second is Sensor which help us to pass input to Arduino about rain.
The Metallic Plate is connected two the sensor with 2 Pin +v –v which help the sensor to get input
This will help us to get alert in our device when Bluetooth is connected by printing message “Raining Outside” and also buzzer and led starts beeping. We can easily turn on and of this function by using our phone when there is no need of this function or feature.
LDR ModuleLDR Module help us to determine day and night.
Nowadays, Electricity Consumption is increased in all houses due to running of outdoor light 24 hours which is not necessary.
So here is the solution this module will automatically detects day and night and will automatically turn on light at night and turn of the light as soon as sun rises.
IR Sensor WorkingIR sensor also play important role in security. This sensor can detects object by passing Infrared Rays.
This sensor also fitted in our Remotes to pass the signal to the receiver When there is any object detected by the sensor so it will print (if Bluetooth connected) “Alert Ir Detects Object” There are led and buzzer attached for this sensor which will beep and blink when object detected. We can easily turn on and of this function by using our phone when there is no need of this function or feature.
Watch the Demonstration VideoComplete Video
Shorts
CLICKHERE







{kind=link}
Comments