

Hardware components | ||||||
| × | 2 | ||||
 |
| × | 1 | |||
| × | 1 | ||||
 |
| × | 1 | |||
Hand tools and fabrication machines | ||||||
 |
| |||||
| ||||||
For my manual pick and place machine, it would be handy to have a tool that flips SMD parts that are upside down in the storage box.
The supplier has such a tool but it is not that cheap, so could I make such a tool myself?
Yes...
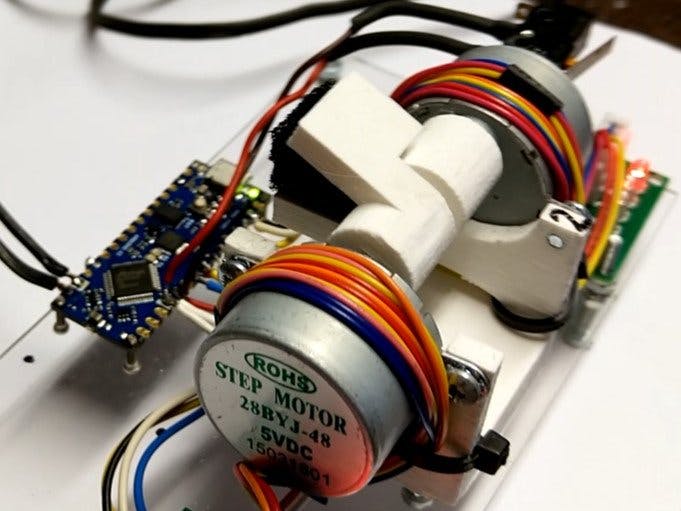
First, my son has designed the needed parts with Solid Works and prepared them for 3D printing.
After that, I wrote a test program for driving the stepper motors.
I'm using a Arduino Nano Every because of his price and the dimensions.
It is not that fast but it works. Power supply, plexi and switch are recup material.
Here is the result:

Thanks to Bas on Tech.



Comments