//*************************** Change these values at base of your needs *****************************
#define VoltageR 9.1f //Voltage to regulate
// Setup of mainboard **********************************************************
#define convertion 0.1754f //Conversion factor
// Definition of inputs and outputs ********************
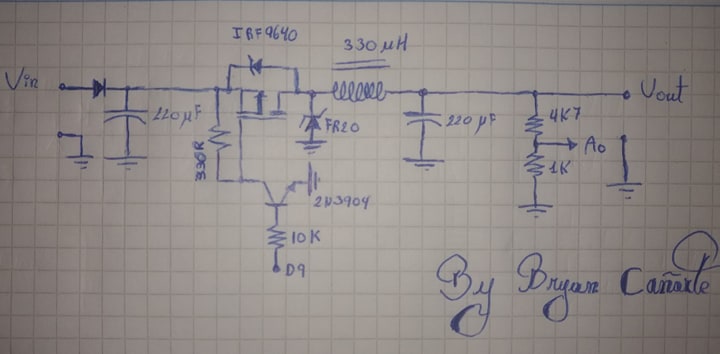
const int uPin = 9; // Control voltage, this is the pin called OC1A
const int x0Pin = A0; //Voltage at the output of the second integrator
// Variables to signal feedback *************************
float FB = 0; // Feedback signal
float RV = 0; // Reference Voltage
int e = 0; // Error variable
float Switch_cycle = 0; //Dute Cycle
// Variables to time operations **************************
unsigned long softStart = 500;
void setup() {
//******************** Set all inputs and outputs **********************************************************
pinMode(uPin,OUTPUT); // Set pin OC1A as output
pinMode(13,OUTPUT); // To indicate the device is operate
//******************** Set and Clear initial ***************************************************
digitalWrite(13,LOW); // Start Led Off
//******************** Calculate all conversions **********************************************************
RV = (VoltageR*convertion*1024/5); //Convert voltage reference to conversion ADC value
//******************* Delay before start operation ********************************************************
SoftStartDelay();
noInterrupts(); // disable all interrupts while do configure
// ******************************* Set PWM frecuency **********************************************
// Freq_PWM = 16Mhz /128 = 125 Khz
TCCR1A = (1<<COM1A1) | (0<<COM1A0) | (0<<COM1B1) | (0<<COM1B0) | (1<<WGM11) | (0<<WGM10);
// COM1A1 = 1 ; COM1A0 = 0 ; COM1B1 = 0 ; COM1B0 = 0 ; Note: When use a inverted output, you must set COM1A1 & COM1A0, if you use a normal output, you only have to must COM1A1
// Clear output OC1A when match happen, Output OC1B disconnected
TCCR1B = (0<<ICNC1) | (0<<ICES1) | (1<<WGM13) | (1<<WGM12) | (0<<CS12) | (0<<CS11) | (1<<CS10);
// ICNC1 & ICES1 are used when Timer had a external signal. Unused in Fast PWM mode
// CS12 = 0; CS11 = 0; CS10 = 0; Select no prescaler
// WGM13 = 1 ; WGM12 = 1; WGM11 = 1 ; WGM10 = 0; Select Fast 8 bit PWM with TOP value on ICR1
ICR1H = 0x00; //Set ICR1 register to 80h (#128) MSB = 0x00, LSB = 80h
ICR1L = 0x80; //This value is TOP of the counter. Timer reach to zero when count is equal to it.
TCNT1H = 0x00; //Reset MSB of the timer
TCNT1L = 0x00; //Reset LSM of the timer
OCR1AH = 0x00; //Clear MSB of the match register, unused in Fast PWM 8 bit
OCR1AL = 0x00; //Set zero to start device off, it register is used to change dute cycle
// ****************************** Set interrup by timer 2 ******************************************
// T = (1/16MHz)*(2^8-00)*8 = 128 uS
TCCR2A = (0<<COM2A1) | (0<<COM2A0) | (0<<COM2B1) | (0<<COM2B0) | (0<<WGM21) | (0<<WGM20);
// COM1A1 = 0 ; COM1A0 = 0 ; COM1B1 = 0 ; COM1B0 = 0 ;
// OC12A and OC2B both are disconnected
TCCR2B = (0<<WGM22) | (0<<CS22) | (1<<CS21) | (0<<CS20);
// CS22 = 0; CS21 = 1; CS20 = 0; Select prescaler Fosc/8
// WGM13 = 0 ; WGM12 = 0; WGM11 = 0 ; WGM10 = 0; Select Normal Mode operation
TCNT2 = 0x00; //This register have a pre-load of the timer. However, in this case, it's no have pre-load
OCR2A = 0x00; //Clear match register. It's unused
OCR2B = 0x00; //Clear match register. It's unused
TIMSK2 = (0<<OCIE2B) | (0<<OCIE2A) | (1<<TOIE2); // enable timer2 overflow interrupt
// ****************************** End of the configurate *******************************************
interrupts(); // enable all interrupts
}
ISR(TIMER2_OVF_vect) // interrupt service routine
{
FB = (float)(analogRead(x0Pin)); //Feedback signal
float k = 0.08; //Gain in close loop
e = RV-FB; //Error
Switch_cycle = Switch_cycle + e*k; //Control
if(Switch_cycle<=0) //Min duty Cycle = 0
Switch_cycle = 0;
if(Switch_cycle>=122) //Mx duty Cycle = 95% ;(122/128)*100 = 95.31% real value
Switch_cycle = 122;
OCR1AL = (unsigned char)(Switch_cycle); //Write duty cycle
}
void SoftStartDelay() // Delay with interval of 500ms before start regulation
{
delay(softStart);
digitalWrite(13,HIGH);
}
void loop() {
// put your main code here, to run repeatedly:
}























{kind=link}
Comments