
Hardware components | ||||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
 |
| × | 1 | |||
| × | 1 | ||||
 |
| × | 1 | |||
Software apps and online services | ||||||
 |
| |||||
Story
According to a press release from the Ministry of Health on Thursday, Singapore has announced stiff fines and jail for those who do not observe social distancing measures put in place to contain the coronavirus outbreak. People who do not observe physical distancing of one meter in “non-transient” interactions can be fined up to 10, 000 Singapore dollars ($6, 985) or be jailed up to six months, or face both penalties.
Such interactions include people on seats not fixed to the floor, who intentionally sit less than one meter from another seated individual in a public place. People standing in a queue in public places who are less than one meter away from the next person will also be prosecuted, according to the rules.
It is necessary in this critical period to keep a distance from others. However, it is not that easy to keep this in mind every second or remind those careless people who used to be too close with others. I made this little pocket distance alarm in order to address this problem, which could give out light and sound warning when people getting into your one-meter circle.
In my last project, I made the pocket distance alarm using SeeeduinoXIAO with a lot of soldering work. The project should be found in following links:
Pocket Distance Alarm: Keep 1m Away from Me - Seeeduino XiaoA portable distance alarm that will give light and sound warning when people get into your one-meter circle.
https://www.hackster.io/Makerming/pocket-distance-alarm-keep-1m-away-from-me-seeeduino-xiao-628eae
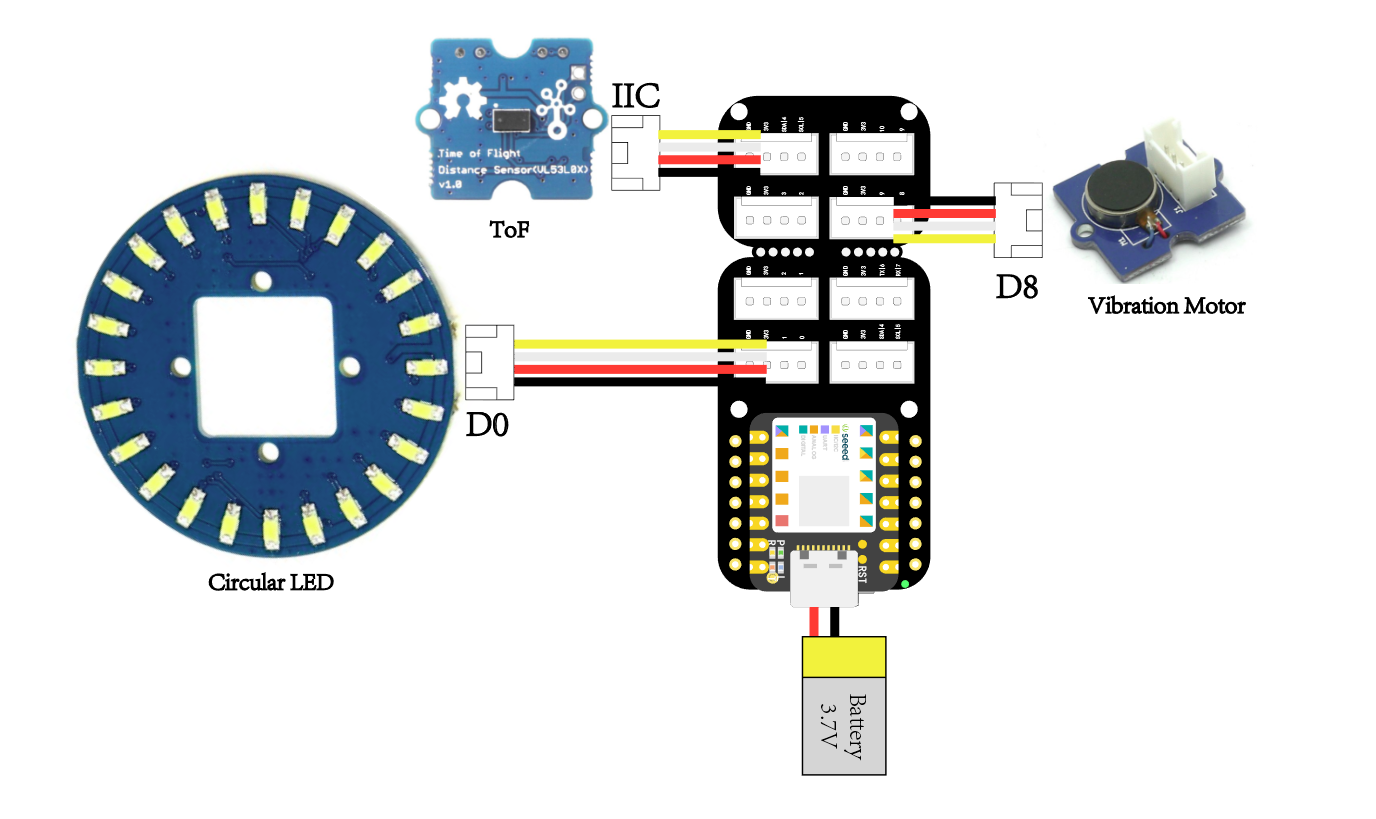
The good news is that now I have the Grove Shield for SeeeduinoXIAO, the expansion board for SeeeduinoXIAO to easily use Grove module without soldering work, therefore I could rebuild this project in a much easier and convenient manner.
Just for three steps, then you will have a pocket distance alarm now!
Let's see how to make it.
Old Version (left) v.s. New Version (right) using Grove Shield for Seeeduino XIAO











{kind=link}
Comments