

Hardware components | ||||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
Software apps and online services | ||||||
 |
| |||||
Hand tools and fabrication machines | ||||||
| ||||||
According to a press release from the Ministry of Health on Thursday, Singapore has announced stiff fines and jail for those who do not observe social distancing measures put in place to contain the coronavirus outbreak. People who do not observe physical distancing of one meter in “non-transient” interactions can be fined up to 10, 000 Singapore dollars ($6, 985) or be jailed up to six months, or face both penalties.
Such interactions include people on seats not fixed to the floor, who intentionally sit less than one meter from another seated individual in a public place. People standing in a queue in public places who are less than one meter away from the next person, will also be prosecuted, according to the rules.
It is necessary in this critical period to keep distance from others. However, it is not that easy to keep this in mind every second or remind those careless people who used to be too close with others. I made this little pocket distance alarm to sovle this problem, which could give out light and sound warning when people getting into your one meter circle.
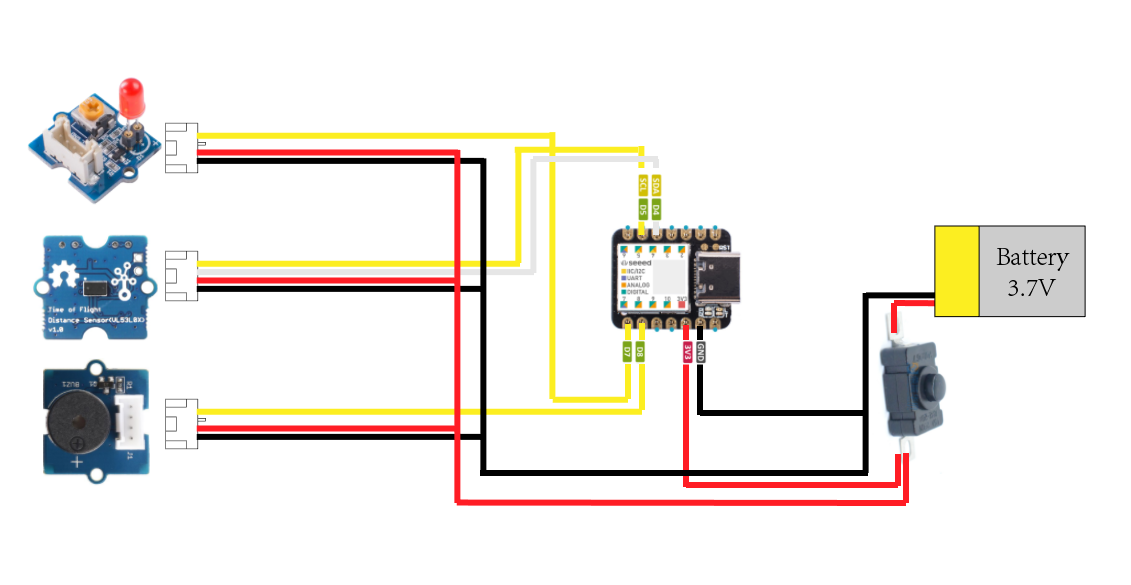
Step 1: Hardware ConnectionSince it is a small wearable product that could not have too big size, I choose to use Seeeduino Xiao as the main board. Seeeduino Xiao is the new release product of Seeedstudio, and the smallest board I could ever have.
The hardward connection could be found as followed.
P.S.: I draw this as 1:1 ratio, and Seeeduino Xiao is really xiao!!!
BTW, “Xiao” means “Small”(小) in Chinese.
Though Xiao is really tiny and cute, the sodering part needs patience. It is said that the breakout board of Xiao will be released soon, therefore hopefully we could enjoy both the tiny size of Xiao and easy grove connection without sodering soon.
My sodering skill is far from excellent. As the outcome you could see.
- First you need to download the VL53L0X Library from Github.
- Extract the Grove-Ranging-sensor-VL53L0X-master.zip file into the Arduino library folder.
- Upload the demo. If you do not know how to upload the code, check How to upload code.
- Open the Serial Monitor of Arduino IDE by click Tool-> Serial Monitor. Or tap the Ctrl+Shift+M key at the same time. Choose 115200 serial, if every thing goes well, you will get the distance result from the monitor.
Note: The grey line is for indicating the module position, only black line should be cut.
Of cause you could design more shape of the shell as long as you could fit all things in.













{kind=link}
Comments