YouTube VideoFor everything about this project, see my YouTube video.
I already attached 26-page PDF, which contains required quantity of parts and its dimensions. Download it from this website tab: Custom parts and enclosures.
_____________________________________________
Note:
All the links to buy parts are non-affiliate links,
You can buy parts somewhere else where you get lower price parts,
It is just for your reference thanks.
_____________________________________________
Any difficulty for making a 3D printer feel free to comment down below.
Electrical Components Required- Arduino Mega 2560 x 01 Nos.
- Ramps 1.4 controller board x 01 Nos.
- Optical endstop switch x 03 Nos.
- NEMA 17 stepper motor x 05 Nos.
- PCB heatbed x 04 Nos.
- E3D v6 hotend x 01 Nos.
- A4988 stepper motor driver x 04 Nos.
- Power supply 12V/20A x 01 Nos.
Mechanical Component Required- Aluminium section pipe 38mmx38mmx02mm
- Acrylic Sheets 3mm thickness
- 12mm Diameter steel Rod 696mmx02 Nos.
- 8mm Diameter steel Rod 562mmx02 Nos.
- 8mm Diameter steel Rod 507mmx02 Nos.
- 3 mm aluminium sheet
- SC8UU 8mm Linear Motion Ball Bearing Slide Bushing X 08 Nos.
- SC12UU 12mm Linear Motion Ball Bearing Slide Bushing X 04 Nos.
- SK12UU Linear Rail Shaft Rod x 04 Nos.
- SK8UU Linear Rail Shaft Rod x 04 Nos.
- Pedestal bearing 8mm KP08 x 02 Nos.
- T8 8mm Lead Screw with Nut 500 to 550mm x 02 Nos.
- stepper motor coupler 5mm to 8mm x 02 Nos.
- GT2 20 tooth flanged pulley for 5 mm shaft x 02 Nos.
- Nema17 Mounting Bracket x 02 Nos.
- Extruder x 01 Nos.
- 1.75mm PLA Filament For 3D Printer x 01 Kg.
- Timing Belt for GT2 pulley x 04 meter.
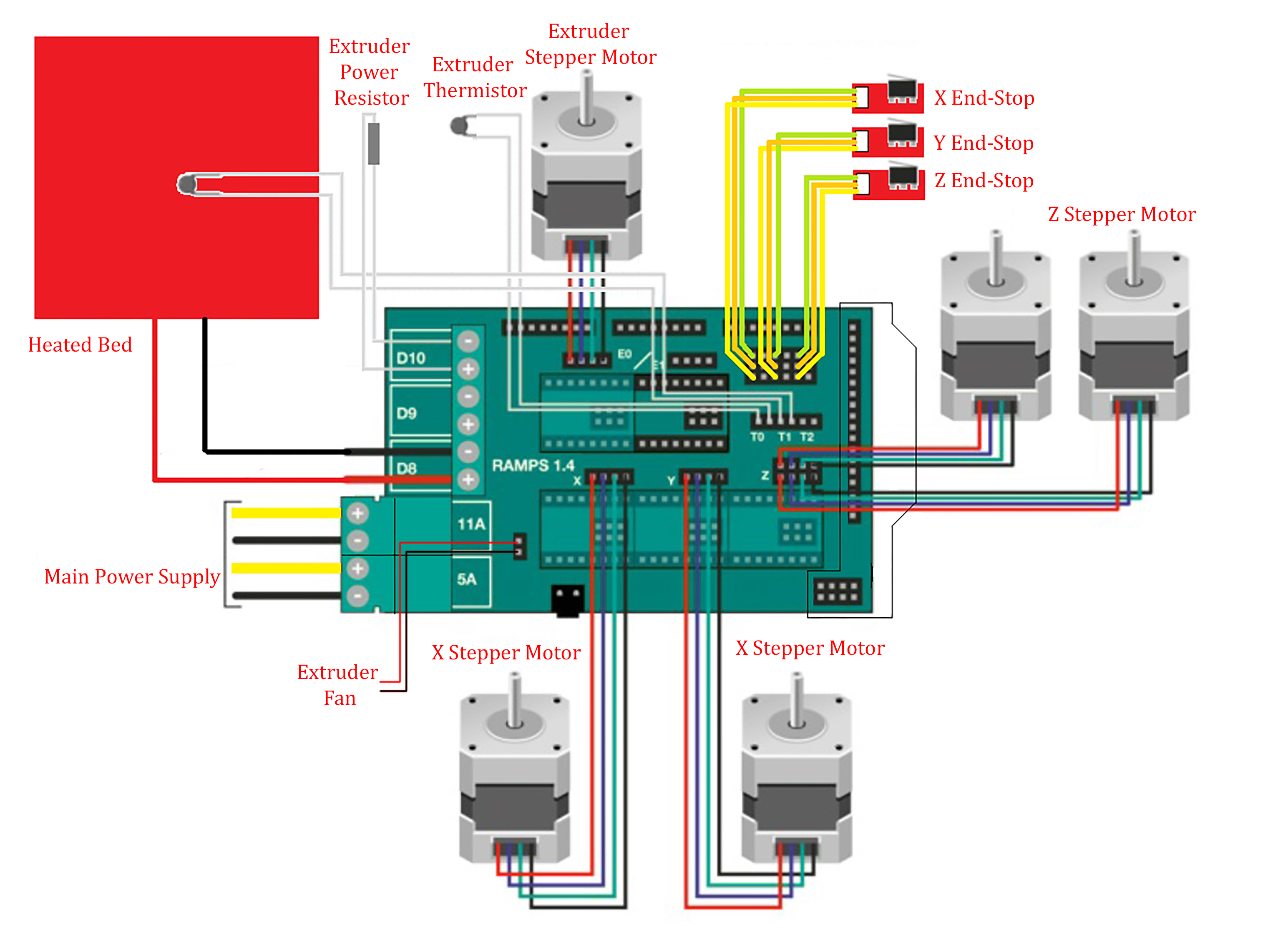
Electrical Components Short Intro :- Ramps 1.4 controller board:
it is used for generally for interfacing serval things like endstop switch, stepper motor driver, heatbed, hotend etc with Arduino.
it is one type of sensor switch, it has NO or NC (normally open or normally closed ) switch are trigger when 3d printers XYZ axis reaches to its end position.
end stop switch is generally two types 1. optical type 2. simple mechanical type. you can use whatever you want.
I used stepper motor which has 200 steps, in one revolution 1.8 degrees of each step
heatbed keep extruded plastic warm and prevent it from warping.
it has a nozzle of 0.4 mm where the filament comes out by heating up of the filament with temperature sensor/ Thermistors is attached.
- A4988 stepper motor driver:
need driver circuit because stepper motor runs at 12V/24V and Arduino pin output is 5V when it is in HIGH condition.
each stepper motors draw around 1.2 A current per phase, a total of 5 stepper motors are used, and other electrical parts draw some amount of current so current ratting minimum 20 A is suitable.
so Let's get started!
Build a FrameFirst of all, I build a frame based on my CAD model Dimension, For Dimension of different parts I already attached 26 pages Pdf it contains Required qty. of parts and its dimension, you can change the dimension as per your convenience. Then I assemble all the different parts together. For more Reference, you can see my youtube video.
Electrical ConnectionIn this scene, I connect all the necessary thing according to Schematics and circuit diagrams image. And for the main Power source, I used 12V, 20A Dc Power Supply. For more reference see the youtube video from 30:57 to 33:15.
CodingFor Coding part, I used Arduino IDE Software and used marlin firmware.
To Download
For more reference see the youtube video from 33:18 to 37:51.
3D Printing SoftwareThere are more software for opensource slicer application like :
3D Slicer, Slic3r, Ultimaker Cura, Repetier-Host But I used.
For more reference see the youtube video from 38:24 to 43:10.
Output ResultAfter all, I complete all the work and my printer is ready for print. The attached image is the result of the first print from my 3D printer.










{kind=link}
Comments