





Hardware components | ||||||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 2 | |||
| × | 2 | ||||
Software apps and online services | ||||||
 |
| |||||
 |
| |||||
 |
| |||||
What is your project about?
The subject of my project is the design and production of a connected rainwater collector. It's an intelligent system that uses technology to make it easier to collect and manage rainwater in our homes and gardens.
Why did you decide to build it?
There are a number of reasons behind this project. Firstly, water is a vital resource which, unfortunately, is not always used efficiently and sustainably. A large volume of rainwater, which could be used for non-potable tasks, is often wasted. Secondly, data indicates that 45% of the water used in a home could be replaced by non-potable water. This offers a huge opportunity to save drinking water, reduce our impact on the environment and save money on our bills.
For private users, knowing the level of water in the tank means knowing whether the volume remaining in the tank is sufficient to meet needs (washing machine, toilet flush). If there is not enough water in the tank, an alert can be sent to the user's mobile device. The user can then decide to fill the tank with water from the public network to meet the need, or to postpone the need until the following day if he or she knows it is due to rain.
What's more, the concept of "connected" means that preventive maintenance can be carried out. If the reservoir level drops when the outlet valve is closed, we can conclude that there is a leak, or conversely, if the water level does not rise when the inlet valve is open, this may be due to a blockage in the pipe.
In a more professional context, monthly (or half-yearly, etc.) data processing will make it possible to establish a history of consumption and therefore to draw up a forecast for future needs.
Analysis of this data could, for example, encourage farmers to switch to cereals.
How does it work?
Our rainwater harvesting system works in the following main stages:
- Detection of the water level in the tank by the ultrasonic sensor.
- Controls the water supply or drain valves depending on the water level in the tank.
- Data sent by the arduino MKR WAN 1300 to the LoRa network and TTN (The Things Network) servers.
- From the TTN servers, data is sent via the MQTT protocol to our Node Red server.
- On the Node Red server, data manipulation (formulas) and display on a graphical interface (gauges).
What's next?
We're planning a number of developments for our connected rainwater tank. For example, we need to set up data storage in a database. We also want to develop a mobile application, from which the user will be able to consult the data history, as well as view the volume of water in the tank and order it to be topped up with drinking water. It would be a good idea to couple our mobile application with a weather API, to help users make decisions.
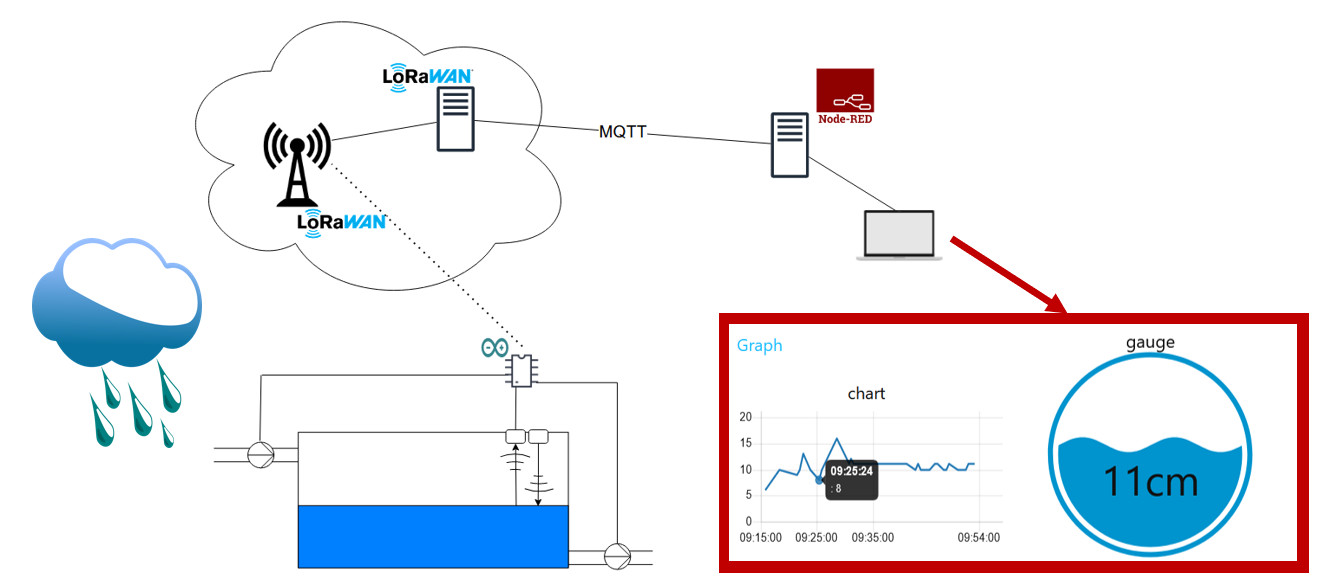
Operating diagram
- Via an Arduino MKRWAN card, this tank uploads data onto the LoRa network;
- The data is processed on the TTN, then converted into MQTT format and sent to a Node-Red server;
- The server retrieves the data via a dashboard on the PC, which connects via a URL.







_3u05Tpwasz.png?auto=compress%2Cformat&w=40&h=40&fit=fillmax&bg=fff&dpr=2)
{kind=link}
Comments