Supply/ delivery drone to assist the fire fighters.
Objective: AI enabled delivery drone for an emergency relief package.
Team: Daniel Hadad, Ratika Goyal, Joel R Knight, Yucheng Guo, James Giandelone, Mauricio Urquiola
Summary: Use drone for an operator-controlled approach where the drone is sent on a scanning mission, the operator runs the pixycam command once it identifies the target, pauses the mission and then manually drops the relief package using RC switch or PX4 command.
Achievements:
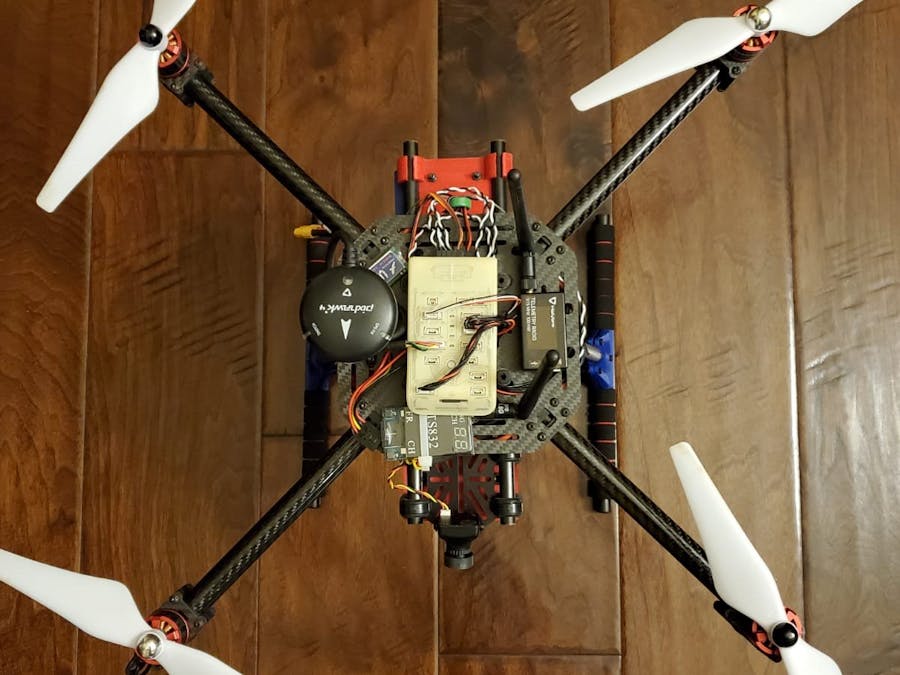
- Assembled drone from kit: KIT-HGDRONEK66
- Got QGroundControl working via Ubuntu VM provided by Hovergames team
- Updated PX4 FW as new releases were done and integrated PixyCam control module
- Added FPV camera to drone, monitor to go with ground control
- Learned how to balance propellers using balancing rod to reduce vibration
· Learned to fly drone both manually and using QGroundcontrol Missions.
- Added servo enabled drop mechanism which can be controlled via RC switch or PX4 command ‘camera_trigger test’ via mavlink (during a mission)
- Upgraded landing legs via 3d printer
- Improved stability of flight
· Get pixycam able to spit out data to the Mavlink console via the ‘pixycam’ command.
· Flew the drone in auto mode and set the geo-border
· PixyCam detected a target reported back via Mavlink to operator who then activated dropping of relief package.
- Demo 1: Team Drop Development -> https://youtu.be/dVkdqkH8BIA
- Demo 2: Team Pixycam Development -> https://youtu.be/OI_D-mjw0Hc
- Waypoint type mission: https://youtu.be/-COEIzyU7ns
- Scanning type mission: Amazon rescue mission (with music etc.) :
Links to things made for this competition on Thingiverse (software in a sense):




Comments