Main article: https://paulplusx.wordpress.com/2016/03/01/rtpts/
Introduction
This project aims to make a system that can effectively track celestial bodies (such as planets ) with a fair amount of accuracy. We will be using some algorithms along with a processing unit for the calculations and a servo mechanism to show the location of the planet physically! The hardware used in the project is pretty much basic and simple because the primary focus of this project is on the software, that is to make people understand about the algorithms and their implementations. So please bear with my "un-formatted" hardware.
Not just planet tracking you will learn some additional important things that you can implement in your other projects :
- Planet tracking using keplers algorithms
- Many co-ordinate systems and their interconversion
- pan-tilt programming and servo mapping (3.5 turns Servo and 180 degree Servo )
- MPU9250 auto-calibration programming
- Using Madwicks/Mahony Filter to Stablise Mpu readings.
- Yaw correction using P- controller with MPU9250
The steps are too detailed to fit in a single page so I have split the project in different pages they are :
- Step 1: Calculation of Right Ascension and Declination and its conversion to Azimuth and Altitude [Calculated using Kepler’s Laws] using Osculating Elements Here is the Hackster Link.
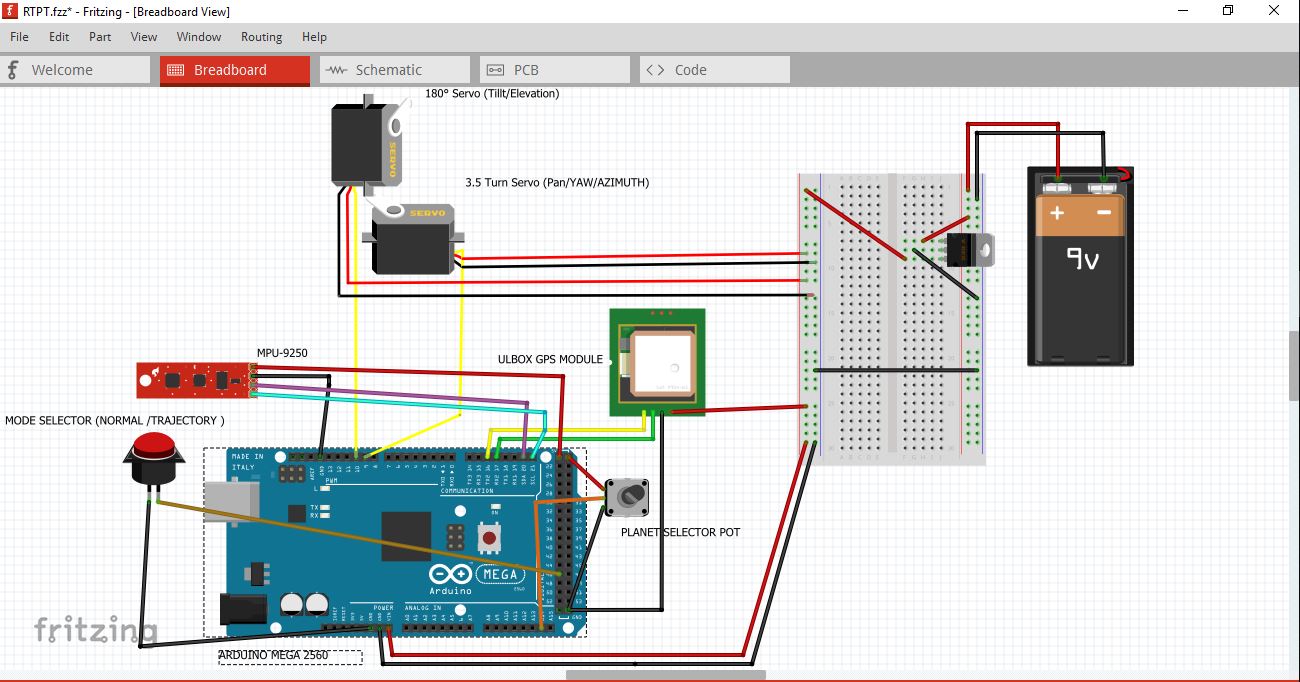
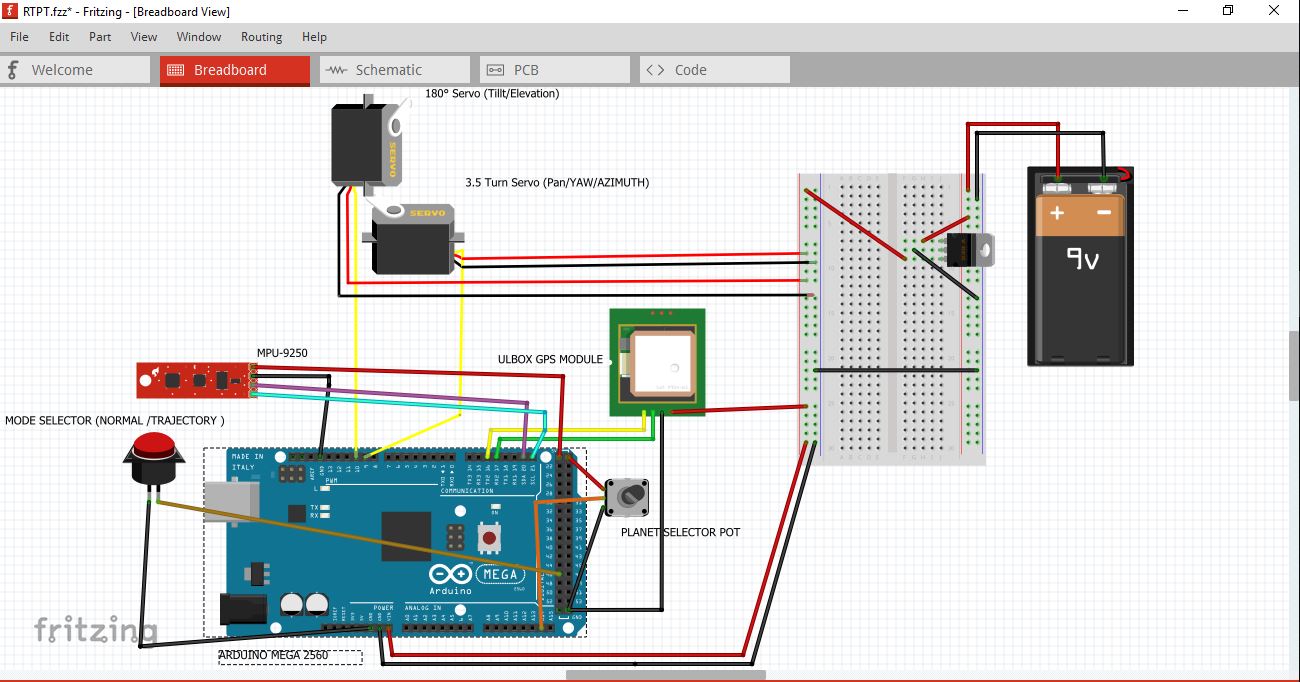
- Step 2: The Circuitry (connections of GPS Module U-BLOX NEO-6M or similar , pan – tilt servo ) and Servo Mapping. Here is the Hackster Link. Note: If you do not use a MPU9250, you will have to align your system in its initial state to the North direction.
- Step 3: This step uses the MPU9250 for automatic north detection and its alignment and best part is that its Dynamic i.e. even you keep changing (the yaw angle) or azimuth alignment it will continuously sense the error and correct it dynamically. Here is the Hackster Link.
- Step 4: Software Integration and Trajectory Prediction. Go to this section for the final Arduino code. Here is the Hackster Link.
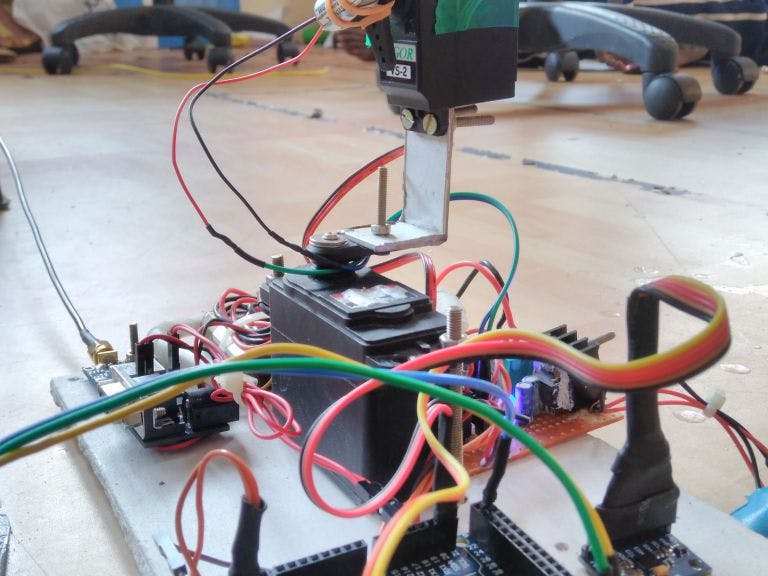
This a my final RTPTs with Arduino Mega ,MPU9250,ULBox GPS,Pan-Tilt Servos and a Laser



_wzec989qrF.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff)











_3u05Tpwasz.png?auto=compress%2Cformat&w=40&h=40&fit=fillmax&bg=fff&dpr=2)
{kind=link}
Comments