/* Gball
* In this example we are demonstrating how to use the Azande Library together with the accelerometer ADXL345.
* The ADXL senses acceleration force in 3 directions X, Y and Z.
*
* Example Specification:
* https://zeijlonsystems.se/products/azande/specification/ArduinoExampleGball.html
*
* Following functions are demonstrated in this example:
* - Azande
* - Connect Wifi to Azande
* - ADXL345, 3-Axis Digital Accelerometer
* - Timer Interrupt with help from Timer5 library
*
* Dependencies
* Following libraries are used and need to be installed in your Arduino IDE:
* - WiFi101 https://github.com/arduino-libraries/WiFi101
* - SparkFun_ADXL345 https://github.com/sparkfun/SparkFun_ADXL345_Arduino_Library
* - Timer5 https://github.com/michael71/Timer5
*
* Hardware
* In this example we have used:
* - one MKR1000
* - one ADXL345
* - one Battery
*
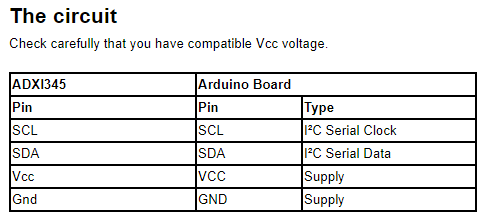
* The circuit:
* ADXl345 Arduino Board
* Pin Pin Type
* SCL SCL IC Serial Clock
* SDA SDA IC Serial Data
* Vcc VCC Supply
* Gnd GND Supply
*
*
* Install Azande Studio:
* https://zeijlonsystems.se/products/azande/specification/DownloadandInstallAzandeStudio.html
*/
#include <SparkFun_ADXL345.h>
#include <Azande.h>
#include <WiFi101.h>
#include <Timer5.h>
#include <math.h>
#include "arduino_secrets.h" // This file must be updated with your personal credentials.
// Default Calibration Parameters for your ADXL345 ==============
#define DefaultRange 16 // Range settings. Accepted values are 2,4,8 or 16 ==>> +/-2,4,8 or 16g range
#define DefaultOffsetX -21
#define DefaultOffsetZ 142
#define DefaultOffsetY -4
#define DefaultGainMs2X 3.924567
#define DefaultGainMs2Y 3.822630
#define DefaultGainMs2Z 3.160041
// Config: Azande Studio Socket Server ===========================
// See Window/Settings/Socket Server in Azande Studio.
char myPcNetworkName[] = "ZEIJLON-SYSTEMS"; // Host Name
unsigned int azandeStudioServerPortNr = 41414; // Port number
//#define USE_SERIAL_DEBUG // Comment this row if you don't want the debug texts on 'Serial'
// Config: Wi-Fi Connection ======================================
char ssid[] = SECRET_SSID; // your network SSID (name)
char pass[] = SECRET_PASS; // your network password (use for WPA, or use as key for WEP)
// Variables: Azande Studio Socket Server. =======================
WiFiClient azandeSocketClient;
// 'Main Menu' ============================================
// Azande Features
define_enum_command(cmdMainMenu, "Main Menu", MainMenu, 0,\
define_enum_item(1, "Falling") \
define_enum_item(2, "Spherical") \
define_enum_item(3, "Setup") \
define_enum_item(4, "Sleep") );
define_double_event(Xms2Event, "X", 6, "m/s", -20, 20, "F2" );
define_double_event(Yms2Event, "Y", 6, "m/s", -20, 20, "F2" );
define_double_event(Zms2Event, "Z", 6, "m/s", -20, 20, "F2" );
// Main States
typedef enum
{
State_MainMenu,
State_FallTime,
State_Spherical,
State_SetupMenu,
State_Calibrating,
State_Sleeping
}StateType;
StateType state;
// 'Setup' =================================================
// 'Setup' Azande Features
define_enum_command(cmdSetupMenu, "Setup", SetupMenu, 0,\
define_enum_item(1, "Calibration: START") \
define_enum_item(2, "Calibration: END") \
define_enum_item(3, "Use Default Calibration") \
define_enum_item(4, "Use Saved Calibration") \
define_enum_item(5, "BACK to Main Menu"));
define_text_event(textEvent, "Feedback", 0, 64 );
define_int_event(rawXevent, "Raw X", 6, , , , );
define_int_event(rawYevent, "Raw Y", 6, , , , );
define_int_event(rawZevent, "Raw Z", 6, , , , );
define_int_event(CalOffsetXevent, "X Offset", 8, , , , );
define_int_event(CalOffsetYevent, "Y Offset", 8, , , , );
define_int_event(CalOffsetZevent, "Z Offset", 8, , , , );
define_double_event(CalGainXevent, "X Gain", 9, , , , "F4" );
define_double_event(CalGainYevent, "Y Gain", 9, , , , "F4" );
define_double_event(CalGainZevent, "Z Gain", 9, , , , "F4" );
define_enum_command(cmdSetRange, "Set Range", SetRange, 4,\
define_enum_item(2, "+/- 2G (20m/s)") \
define_enum_item(4, "+/- 4G (40m/s)") \
define_enum_item(8, "+/- 8G (80m/s)") \
define_enum_item(16, "+/- 16G (160m/s)"));
// 'Setup' Text Messages
char * message;
char msgSetupMenu[] = "Setup";
char msgStartCalibration[] = "Calibration Started";
char msgSaveCalibration[] = "Calibration Saved";
char msgUseDefault[] = "Use Default";
char msgUseSaved[] = "Use Saved";
char msgRangeSet2g[] = "Range +/-2G";
char msgRangeSet4g[] = "Range +/-4G";
char msgRangeSet8g[] = "Range +/-8G";
char msgRangeSet16g[] = "Range +/-16G";
// 'Setup' Min and Max while calibrating
int rawMinX;
int rawMaxX;
int rawMinY;
int rawMaxY;
int rawMinZ;
int rawMaxZ;
// 'Setup' Saved values after calibration
int offsetXSaved;
int offsetYSaved;
int offsetZSaved;
double gainMs2XSaved;
double gainMs2YSaved;
double gainMs2ZSaved;
// 'Fall Time' ========================================================
// 'Fall Time' Azande Features
define_enum_command(FallMenuCmd, "Fall Time", FallMenu, 0,\
define_enum_item(1, "BACK to Main Menu"));
define_int_event(FallTimeEvent, "Fall Time", 4, "ms", , , );
define_double_event(FallDistanceEvent, "Fall Distance", 5, "cm", , , "F1" );
// 'Fall Time' Config
#define FALL_UPPER 2.5 // When acceleration is more than FALL_UPPER, the fall have ended.
#define FALL_LOWER 1.5 // When acceleration is less than FALL_LOWER, the fall have started.
// 'Fall Time' Variables
volatile long interruptCounter; // incremented in timer interrupt
volatile long latestFallTime = 0;
volatile double latestFallDistance = 0;
bool isFalling = false;
// 'Spherical' ========================================================
// 'Spherical' Azande Features
define_enum_command(SphericalMenuCmd, "Spherical", SphericalMenu, 0,\
define_enum_item(1, "BACK to Main Menu"));
define_double_event(PhiEvent, "PHI angle", 14, "", 0, 180, "F1" );
define_double_event(ThetaEvent, "THETA angle", 14, "", -180, 180, "F1" );
define_double_event(RadialEvent, "Radial Acceleration", 14, "m/s", 0, 200, "F1" );
// 'Spherical' Variables
double SphericalPhi = 0;
double SphericalTeta = 0;
double SphericalR = 0;
Azande azande(azandeSocketClient); // Create Azande object with "Socket Client" as "Stream".
ADXL345 adxl = ADXL345(); // USE FOR I2C COMMUNICATION
// Gravity Constants ====================================
#define OneGms2 9.81
#define OneHalfGms2 9.81 / 2.0
// Conversion Variables =================================
int offsetX = DefaultOffsetX;
int offsetY = DefaultOffsetY;
int offsetZ = DefaultOffsetZ;
double gainMs2X = DefaultGainMs2X;
double gainMs2Y = DefaultGainMs2Y;
double gainMs2Z = DefaultGainMs2Z;
// Read Values ==========================================
double ms2X = 0; // raw X value converted to m/s
double ms2Y = 0; // raw Y value converted to m/s
double ms2Z = 0; // raw Z value converted to m/s
int rawX;
int rawY;
int rawZ;
void setup()
{
waitForSerialIfAny();
if (WiFi.status() == WL_NO_SHIELD)
{
debugPrintln("WiFi shield not present");
while (true); // don't continue:
}
tryConnectToWifiNetwork(); // Blocks until connection succeed
tryConnectToAzandeStudioServer(); // Blocks until connection succeed
azande.begin();
gotoMainMenu();
adxl.powerOn(); // Power on the ADXL345
adxl.setRangeSetting(DefaultRange);
MyTimer5.begin(200); // 200=for toggle every 5msec
MyTimer5.attachInterrupt(Timer5_IRQ);
MyTimer5.start();
}
void loop()
{
if (state == State_Sleeping)
{
delay(500);
ReadFromSensor();
SphericalR = sqrt((ms2X * ms2X) + (ms2Y * ms2Y) + (ms2Z * ms2Z));
if (SphericalR < FALL_UPPER) // If we are Free Falling wakeup
{
tryConnectToWifiNetwork(); // Blocks until connection succeed
tryConnectToAzandeStudioServer(); // Blocks until connection succeed
gotoMainMenu();
}
}
else if (!azandeSocketClient.connected())
{
// if the server is disconnected, try to re-connect.
debugPrintln("Lost connection with server");
tryConnectToAzandeStudioServer();
gotoMainMenu();
}
else
{
switch (state)
{
case State_Spherical:
ReadFromSensor();
SphericalR = sqrt((ms2X * ms2X) + (ms2Y * ms2Y) + (ms2Z * ms2Z));
if (SphericalR != 0.0) // Avoid division with zero
{
SphericalPhi = (acos(ms2Z / SphericalR) * 180) / PI;
}
else
{
SphericalPhi = 0;
}
SphericalTeta = (atan2(ms2Y, ms2X) * 180) / PI ;
azande.send(PhiEvent, SphericalPhi);
azande.send(ThetaEvent, SphericalTeta);
azande.send(RadialEvent, SphericalR);
break;
case State_SetupMenu:
ReadFromSensor();
azande.send(rawXevent, rawX);
azande.send(rawYevent, rawY);
azande.send(rawZevent, rawZ);
azande.send(textEvent, message);
break;
case State_Calibrating:
ReadFromSensor();
azande.send(rawXevent, rawX);
azande.send(rawYevent, rawY);
azande.send(rawZevent, rawZ);
azande.send(textEvent, message);
if (rawX < rawMinX) rawMinX = rawX;
if (rawY < rawMinY) rawMinY = rawY;
if (rawZ < rawMinZ) rawMinZ = rawZ;
if (rawX > rawMaxX) rawMaxX = rawX;
if (rawY > rawMaxY) rawMaxY = rawY;
if (rawZ > rawMaxZ) rawMaxZ = rawZ;
break;
case State_FallTime:
azande.send(RadialEvent, SphericalR);
azande.send(FallTimeEvent, latestFallTime);
azande.send(FallDistanceEvent, latestFallDistance);
break;
default:
case State_MainMenu:
ReadFromSensor();
azande.send(Xms2Event, ms2X);
azande.send(Yms2Event, ms2Y);
azande.send(Zms2Event, ms2Z);
}
azande.readStream();
}
delay(5);
}
void Timer5_IRQ(void)
{
if (state == State_FallTime)
{
ReadFromSensor();
SphericalR = sqrt((ms2X * ms2X) + (ms2Y * ms2Y) + (ms2Z * ms2Z));
if (isFalling)
{
interruptCounter++;
if (SphericalR > FALL_UPPER)
{
isFalling = false;
latestFallTime = interruptCounter * 5;
// Calculate the distance of the fall. Note that we assume that the ball have velocity=0 when fall starts.
latestFallDistance = 100.0 * (OneGms2 * ((double)latestFallTime / 1000.0) * ((double)latestFallTime / 1000.0)) / 2.0;
}
}
else
{
if (SphericalR < FALL_LOWER)
{
isFalling = true;
interruptCounter = 0;
}
}
}
}
void ReadFromSensor(void)
{
adxl.readAccel(&rawX, &rawY, &rawZ); // Read the accelerometer values and store them in variables declared above x,y,z
// Calculate m/s with help of calibration parameters.
ms2X = (rawX - offsetX)/gainMs2X;
ms2Y = (rawY - offsetY)/gainMs2Y;
ms2Z = (rawZ - offsetZ)/gainMs2Z;
}
void tryConnectToWifiNetwork()
{
int status = WL_IDLE_STATUS;
debugPrint("Attempting to connect to SSID: ");
debugPrintln(ssid);
status = WiFi.begin(ssid, pass);
while (status != WL_CONNECTED)
{
delay(10000); // Wait 10s
debugPrint("Attempting to connect to SSID: ");
debugPrintln(ssid);
status = WiFi.begin(ssid, pass);
}
debugPrintln("Connected to wifi");
printWiFiStatus();
}
void tryConnectToAzandeStudioServer()
{
debugPrintln("Starting connection to Azande Studio Server...");
azandeSocketClient.connect(myPcNetworkName, azandeStudioServerPortNr);
while (!azandeSocketClient.connected())
{
debugPrintln("Failed to connect to Azande Studio Server.");
delay(5000); // wait 5s
debugPrintln("Retry connection to Azande Studio Server...");
azandeSocketClient.connect(myPcNetworkName, azandeStudioServerPortNr);
}
debugPrint("Connected to server on ");
debugPrintln(myPcNetworkName);
delay(100);
}
void waitForSerialIfAny()
{
#ifdef USE_SERIAL_DEBUG
// Use "Serial" for debug printing
Serial.begin(9600);
while (!Serial); // wait for serial port to connect. Needed for native USB port only
#endif
}
void printWiFiStatus()
{
#ifdef USE_SERIAL_DEBUG
// print the SSID of the network you're attached to:
Serial.print("SSID: ");
Serial.println(WiFi.SSID());
// print your WiFi shield's IP address:
IPAddress ip = WiFi.localIP();
Serial.print("My IP Address: ");
Serial.println(ip);
// print the received signal strength:
long rssi = WiFi.RSSI();
Serial.print("signal strength (RSSI):");
Serial.print(rssi);
Serial.println(" dBm");
#endif
}
void debugPrint(char* txt)
{
#ifdef USE_SERIAL_DEBUG
Serial.print(txt);
#endif
}
void debugPrintln(char* txt)
{
#ifdef USE_SERIAL_DEBUG
Serial.println(txt);
#endif
}
void gotoMainMenu(void)
{
azande.clear();
azande.add(Xms2Event);
azande.add(Yms2Event);
azande.add(Zms2Event);
azande.add(cmdMainMenu);
azande.notify();
state = State_MainMenu;
}
void gotoFallTime(void)
{
azande.clear();
azande.add(FallTimeEvent);
azande.add(FallDistanceEvent);
azande.add(FallMenuCmd);
azande.notify();
state = State_FallTime;
}
void gotoSphericalMenu(void)
{
azande.clear();
azande.add(SphericalMenuCmd);
azande.add(PhiEvent);
azande.add(ThetaEvent);
azande.add(RadialEvent);
azande.notify();
state = State_Spherical;
}
void gotoSetupMenu(void)
{
message = msgSetupMenu;
azande.clear();
azande.add(textEvent);
azande.add(cmdSetupMenu);
azande.add(cmdSetRange);
azande.add(rawXevent);
azande.add(rawYevent);
azande.add(rawZevent);
azande.add(CalOffsetXevent);
azande.add(CalOffsetYevent);
azande.add(CalOffsetZevent);
azande.add(CalGainXevent);
azande.add(CalGainYevent);
azande.add(CalGainZevent);
azande.notify();
state = State_SetupMenu;
}
void MainMenu(long item)
{
switch (item)
{
case 1: // "1. Fall Time"
gotoFallTime();
break;
case 2: // "2. Spherical"
gotoSphericalMenu();
break;
case 3: // "3. Setup"
gotoSetupMenu();
break;
case 4: // "4. Sleep"
state = State_Sleeping;
WiFi.end(); // Disconnect and turn off WiFi.
delay(5000); // Wait 5s to make sure Azande Studio removed the connection.
break;
}
}
void SetupMenu(long item)
{
switch (item)
{
case 1: // "1. Start Calibration"
state = State_Calibrating;
message = msgStartCalibration;
rawMinX = rawX;
rawMaxX = rawX;
rawMinY = rawY;
rawMaxY = rawY;
rawMinZ = rawZ;
rawMaxZ = rawZ;
break;
case 2: // "2. Save Calibration"
state = State_SetupMenu;
message = msgSaveCalibration;
// Calculate and save new calibration parameters
offsetXSaved = (rawMinX + rawMaxX) / 2;
offsetYSaved = (rawMinY + rawMaxY) / 2;
offsetZSaved = (rawMinZ + rawMaxZ) / 2;
gainMs2XSaved = (double)(rawMaxX - rawMinX) / OneHalfGms2;
gainMs2YSaved = (double)(rawMaxY - rawMinY) / OneHalfGms2;
gainMs2ZSaved = (double)(rawMaxZ - rawMinZ) / OneHalfGms2;
// Use new parameters
offsetX = offsetXSaved;
offsetY = offsetYSaved;
offsetZ = offsetZSaved;
gainMs2X = gainMs2XSaved;
gainMs2Y = gainMs2YSaved;
gainMs2Z = gainMs2ZSaved;
azande.send(CalOffsetXevent, offsetX);
azande.send(CalOffsetYevent, offsetY);
azande.send(CalOffsetZevent, offsetZ);
azande.send(CalGainXevent, gainMs2X);
azande.send(CalGainYevent, gainMs2Y);
azande.send(CalGainZevent, gainMs2Z);
break;
case 3: // "3. Use Default Calibration"
message = msgUseDefault;
adxl.setRangeSetting(DefaultRange);
offsetX = DefaultOffsetX;
offsetY = DefaultOffsetY;
offsetZ = DefaultOffsetZ;
gainMs2X = DefaultGainMs2X;
gainMs2Y = DefaultGainMs2Y;
gainMs2Z = DefaultGainMs2Z;
break;
case 4: // "4. Use Saved Calibration"
message = msgUseSaved;
// Use new parameters
offsetX = offsetXSaved;
offsetY = offsetYSaved;
offsetZ = offsetZSaved;
gainMs2X = gainMs2XSaved;
gainMs2Y = gainMs2YSaved;
gainMs2Z = gainMs2ZSaved;
break;
case 5: // "5. BACK to Main Menup"
gotoMainMenu();
break;
}
}
void SphericalMenu(long item)
{
switch (item)
{
case 1: // "BACK to Main Menu"
gotoMainMenu();
break;
}
}
void FallMenu(long item)
{
switch (item)
{
case 1: // "BACK to Main Menu"
gotoMainMenu();
break;
}
}
void SetRange(long range)
{
switch (range)
{
case 2:
adxl.setRangeSetting(2);
message = msgRangeSet2g;
break;
case 4:
adxl.setRangeSetting(4);
message = msgRangeSet4g;
break;
case 8:
adxl.setRangeSetting(8);
message = msgRangeSet8g;
break;
default:
case 16:
adxl.setRangeSetting(16);
message = msgRangeSet16g;
break;
}
}








_3u05Tpwasz.png?auto=compress%2Cformat&w=40&h=40&fit=fillmax&bg=fff&dpr=2)


{kind=link}
Comments