#define REMOTEXY_MODE__ESP8266WIFI_LIB_POINT
#include <ESP8266WiFi.h>
#include <RemoteXY.h>
// RemoteXY connection settings
#define REMOTEXY_WIFI_SSID "yobots"
#define REMOTEXY_WIFI_PASSWORD "12345678"
#define REMOTEXY_SERVER_PORT 6377
// RemoteXY configurate
#pragma pack(push, 1)
uint8_t RemoteXY_CONF[] =
{ 255,4,0,0,0,28,0,8,13,0,
5,0,28,9,40,40,2,26,31,4,
0,82,3,8,48,2,26,4,128,1,
51,96,9,2,26 };
// this structure defines all the variables of your control interface
struct {
// input variable
int8_t joystick_1_x; // =-100..100 x-coordinate joystick position
int8_t joystick_1_y; // =-100..100 y-coordinate joystick position
int8_t slider_1; // =0..100 slider position
int8_t slider_2; // =0..100 slider position
// other variable
uint8_t connect_flag; // =1 if wire connected, else =0
} RemoteXY;
#pragma pack(pop)
#include <Servo.h>
Servo servo1;
Servo servo2;
Servo servo3;
Servo servo4;
/////////////////////////////////////////////
// END RemoteXY include //
/////////////////////////////////////////////
void setup()
{
RemoteXY_Init ();
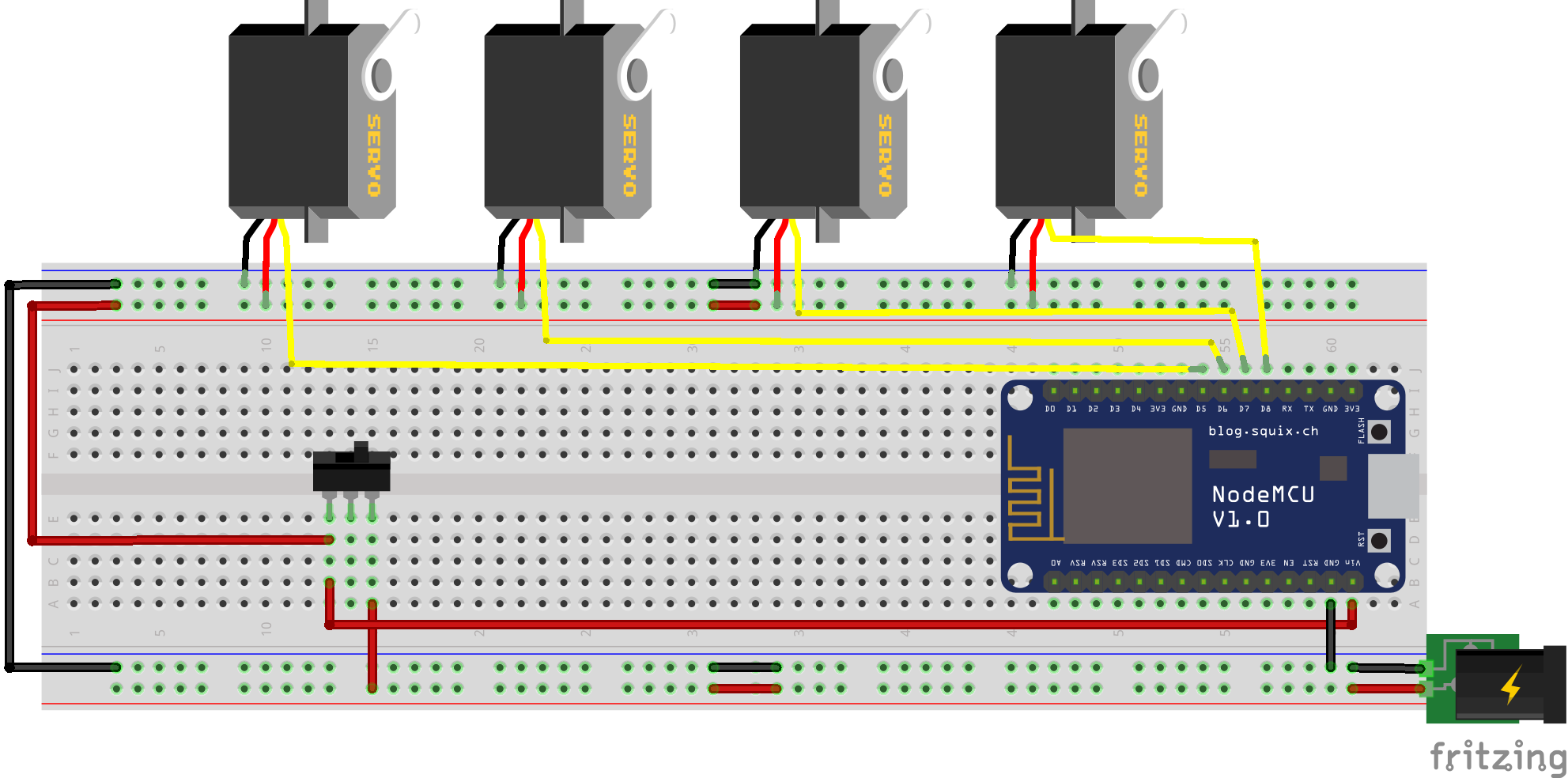
servo1.attach(D5);
servo2.attach(D6);
servo3.attach(D7);
servo4.attach(D8);
// TODO you setup code
}
void loop()
{
RemoteXY_Handler ();
int val1;
int val2;
int val3;
int val4;
val1=map(RemoteXY.joystick_1_x,-100,100,0,180);
val2=map(RemoteXY.joystick_1_y,-100,100,0,180);
val3=map(RemoteXY.slider_1,0,100,0,180);
val4=map(RemoteXY.slider_2,0,100,0,180);
servo1.write(val1);
servo2.write(val2);
servo3.write(val3);
servo4.write(val4);
//delay();// TODO you loop code
// use the RemoteXY structure for data transfer
}







{kind=link}
Comments