

Hardware components | ||||||
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 2 | ||||
 |
| × | 1 | |||
| × | 1 | ||||
 |
| × | 2 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 1 | ||||
 |
| × | 9 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 1 | ||||
 |
| × | 18 | |||
Software apps and online services | ||||||
 |
| |||||
Hand tools and fabrication machines | ||||||
 |
| |||||
 |
| |||||
Excerpt from Wikipedia: Pale Blue Dot
Pale Blue Dot is a photograph of Earth taken on February 14, 1990, by the Voyager 1 space probe from an unprecedented distance of over 6 billion kilometers (3.7 billion miles, 40.5 AU), as part of that day's Family Portrait series of images of the Solar System.In the photograph, Earth's apparent size is less than a pixel; the planet appears as a tiny dot against the vastness of space, among bands of sunlight reflected by the camera. Commissioned by NASA and resulting from the advocacy of astronomer and author Carl Sagan, the photograph was interpreted in Sagan's 1994 book, Pale Blue Dot, as representing humanity's minuscule and ephemeral place amidst the cosmos.
Source: Wikipedia — Pale Blue Dot (retrieved August 2025)
In this work, the image of Earth is projected onto a water droplet about 3 mm in diameter.
When viewed from a distance of 30 cm, this tiny Earth appears the same size as the real Earth would from about 1.3 million kilometers away.
That distance is roughly three times the span between Earth and the Moon — a realm humanity has yet to reach. What will we think when, having departed from Earth, we see our planet like this? And what will we feel when, returning to the Earth’s sphere, we once again catch sight of this small, fragile world?
In the not-so-distant future, humanity will indeed behold the Earth in the form of this droplet-sized world.
A stroboscope is a device that emits intense light periodically, allowing the observation of fast-moving objects.
When light synchronized with the motion cycle of a periodically moving object is projected onto it, the object appears to be stationary. This phenomenon is called the stroboscopic effect (or strobe effect). By slightly shifting the light’s period, it is also possible to create visual effects similar to slow motion or reverse playback.
Many commercial stroboscopes are available and are used to observe and measure vibrating objects such as high-speed rotating motors, fans, and loudspeakers. Typical commercial products are capable of emitting flashes lasting from a few microseconds to a few milliseconds, at a maximum rate of about 1,000 to 2,000 times per second.
Since strong light is required for the human eye to perceive such short flashes, higher brightness is necessary for observation at high cycles. For this reason, stroboscopes are designed to emit intense light in very short bursts.
In this project, we built a stroboscope using an M5Stack and projected animations displayed on the M5Stack’s screen into a droplet of water.
BOM- M5Stack Core2 x1
- M5Stack BASE26 x1
- Universal Board x2
- Peristatic Pump DC12V x1
- Potentiometer 1K B x2
- Toggle Switch x1
- White LED x9
- Nch MOSFET IRLZ44N x1
- Resistor 10 x9
- Resistor 1K x1
- Resistor 10K x1
- Connectors
- Cables
- Screws
- Sricone Rubber Cube I.D=2,O.D=3
This work is both a science education initiative and an art project that makes use of scientific principles.
It enables the observation of periodic motion through a stroboscope and projects images onto airborne water droplets, evoking a sense of weightlessness.
Through this, it expresses the beauty and fragility of a small Earth floating in the vastness of space.
To use this system as a stroboscope, we built a flashlight module consisting of nine bundled white LEDs. This allows us to illuminate and observe arbitrary objects.
In this project, we created a droplet generator to observe falling water drops.
In addition, by displaying animations on the M5Stack’s screen and blinking its backlight instead of using the LED light source, we can project the screen’s image into the water drops.
Two potentiometers placed on the controller adjust the flash cycle and flash duration. By changing the flash cycle, visual effects can be achieved such as making the droplets appear stationary or moving in slow motion.
We constructed a droplet generator to observe falling water droplets using a stroboscope. Water is stored in an upper tank, and droplets are periodically released from the lower nozzle under hydrostatic pressure. The nozzle is made from a silicone rubber tube, and the droplet rate can be adjusted with a roller clamp placed along the tube. The housing of the droplet device was fabricated using 3D-printed components.
The system is designed as a circulation type: the water collected in the tray beneath the tank is pumped back to the upper tank. The tank has an overflow structure so that the water level inside is always maintained at a constant height. This ensures that the water pressure at the nozzle remains stable, thereby stabilizing the droplet cycle.
The circulation pump is installed separately from the tank, on the controller side, because pump vibrations can disturb the droplet cycle. In principle, it is possible to actively control the droplet cycle by intentionally transmitting regular vibrations to the nozzle. However, such active control also transfers vibrations to the droplets themselves, preventing the formation of clean, spherical drops. Therefore, in this setup we adopted a passive control method using hydrostatic pressure.
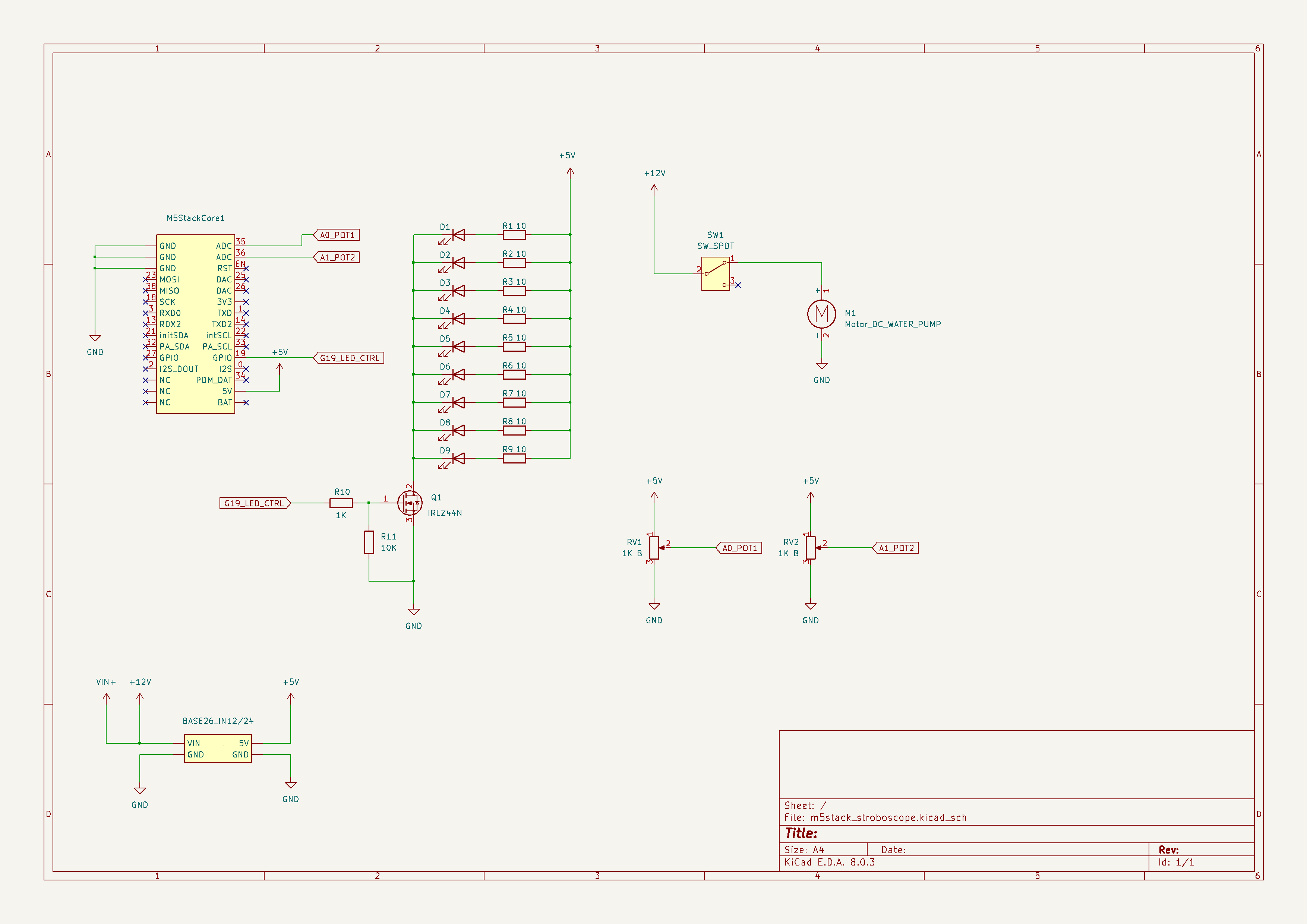
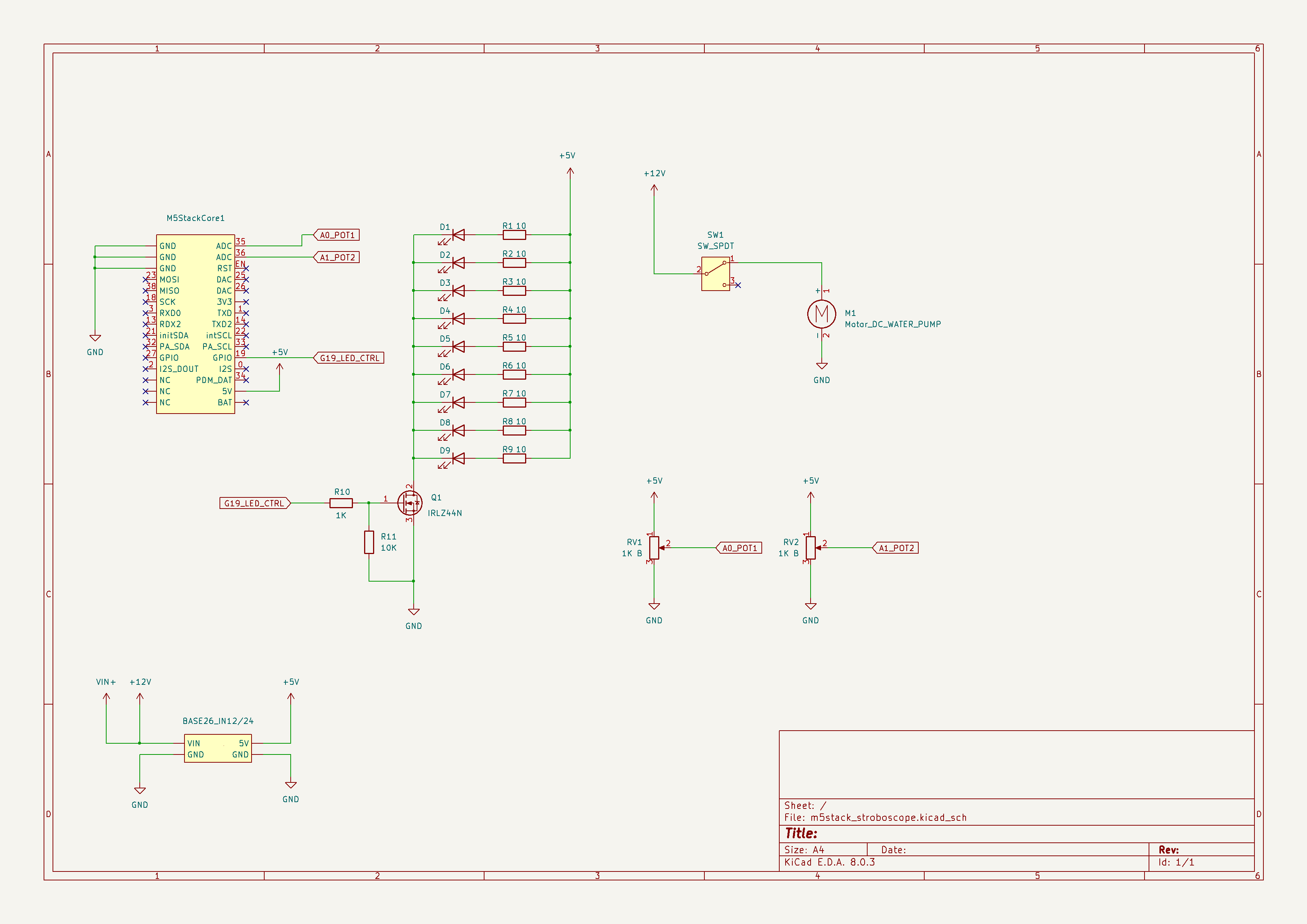
Control CircuitInitially, this device used an Arduino UNO to control the stroboscope, while the M5Stack Core2 handled animation playback.
A dedicated shield board was developed for the Arduino UNO (shown on the right in the photo), which included a MOSFET switching circuit and potentiometers for adjusting droplet timing.
Since the M5Stack Core2 is capable of managing both strobe control and animation playback with a single unit, an additional interface board (shown on the left in the photo) was created. This board connects the Core2 to the main control circuit.
The M5Stack Core2 reads the potentiometers via ADC pins G35 and G36, and outputs the strobe timing signal through pin G26.
For outputting control signals from the M5Stack, the BASE26 module is used.
Because the BASE26 includes a built-in DC-DC converter, it accepts a DC 12V input, which is then used to power both the controller and the pump.
The pump itself is driven directly at 12V.
To control the display backlight of the M5Stack Core2, the power line was tapped directly from the backlight FPC.
By connecting this circuit to the stroboscope circuitry, it became possible to apply the same illumination control to the display backlight, enabling synchronized strobe effects.
The animations shown on the M5Stack display are stored on a microSD card.
The storage format is RGB565 (16-bit) BMP.
For best results, the image resolution should match the display at 320×240 pixels.
In this project, since the animation depicted the Earth, 240×240 pixel images were used instead to reduce loading time.





{kind=link}
Comments