Seeduino XIAO is a small and powerful development board, which can make many interesting makers' works. Using it to design an Arduino robot car should be a good learning case, which is very suitable for beginners.
How to build robots
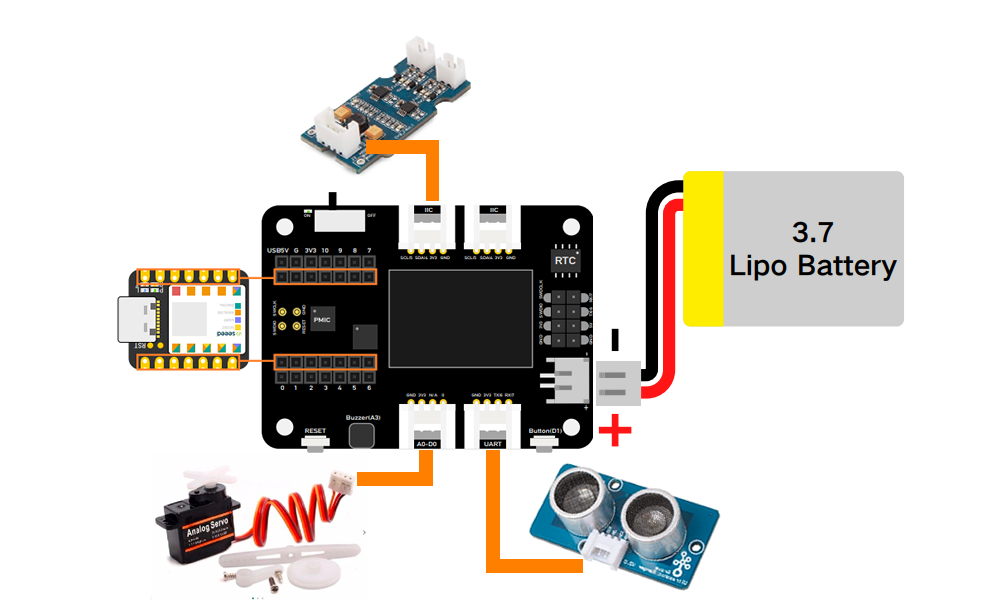
Here are the main parts we will need for the project.
Assemble the robot chassis with two TT DC motors, 3 wheels and Grove - Mini Motor Driver V1.1 controller.
Robot first floor chassisInstall Grove - Mini Motor Driver on the first floor chassis
Mounting bracket and motor
Install the motor bracket on the chassis and TT motor onto the bracket.
After the two TT motors are installed, the installation of universal wheels requires a 12mm copper column, so that the installation of the first floor chassis is completed.
Assembling ultrasonic PTZ of steering gear
Use acrylic plate to cut a steering gear bracket to install ultrasonic sensor to form a PTZ structure.
Install the SeeduinoXIAO and expansion board
Then start to install the SeeduinoXIAO and expansion board, and then use the double-sided sticker to install the battery.
The Seeduino XIAO ultrasonic obstacle avoidance robot installed the lithium battery and fixed the second chassis with screws, so that the car was assembled.












{kind=link}
Comments