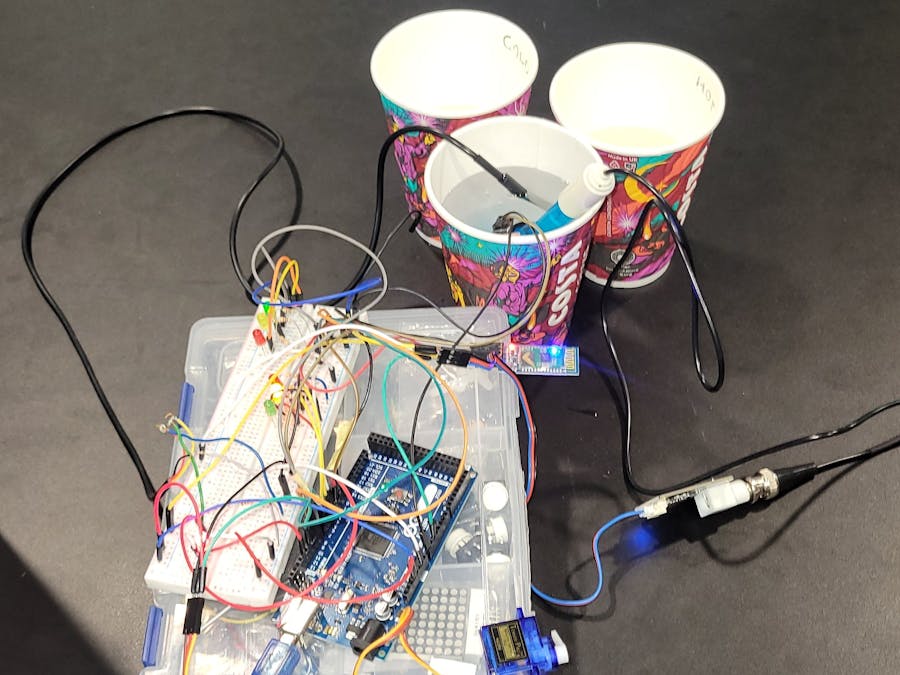
Temperature Sensor (Bithal): The sensor was used to to monitor and control temperature levels of the unfiltered water in the sewage treatment which then can be used to reduce bacteria's capacity to flocculate sediment, damage filter filaments, and inhibit the growth of specific bacteria.
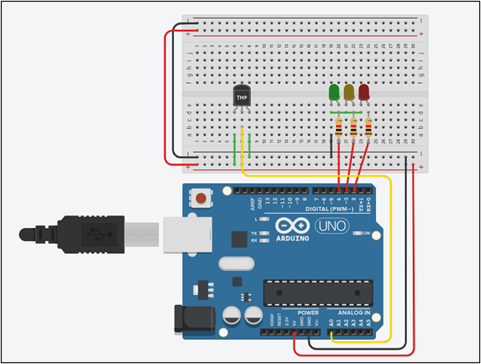
Water level sensor (Abdullah) :The water level sensor was used to send alerts that indicates if the water level is high, medium, or low, in response to that the servo motor receives this signal as an input to do a programmed action either by opening or closing the valve.
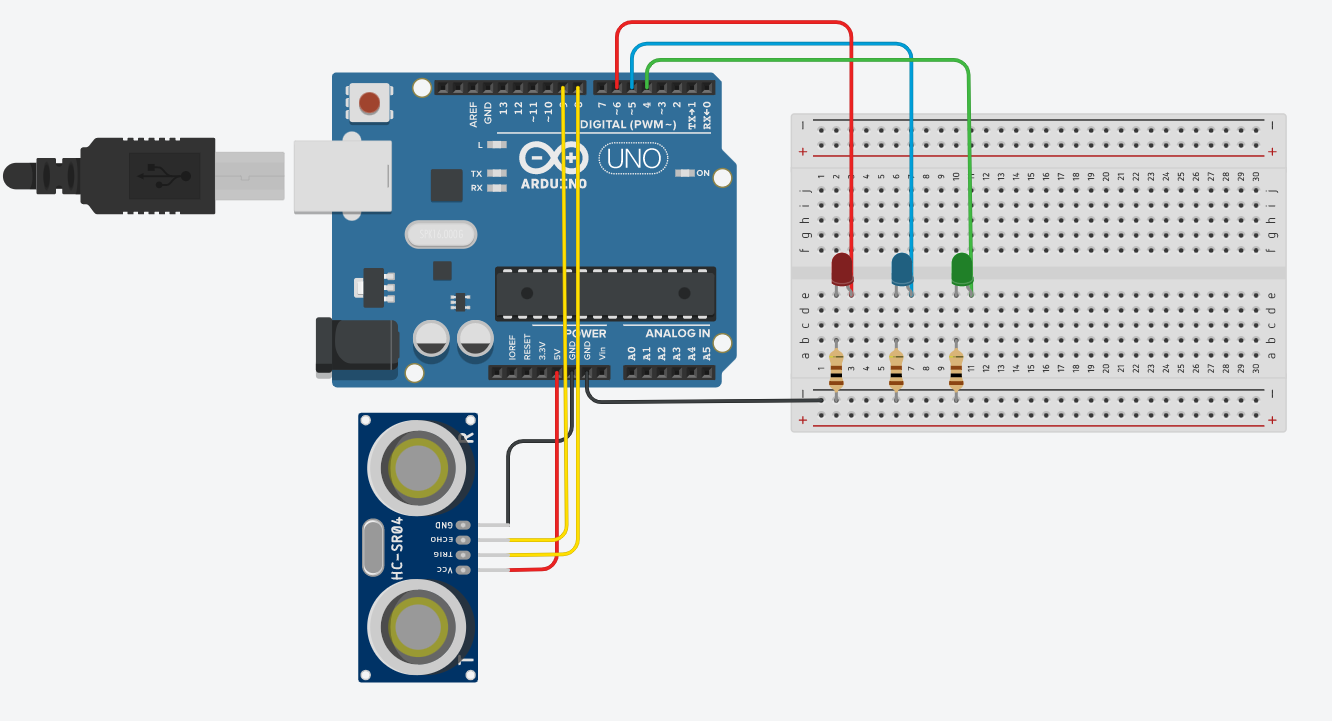
Micro servo motor (Aref): The micro servo motor was used to open and close the gate for the water that goes to fill the tank. It opens from 0 to 180 degrees, and it receives the signals from the water level sensor, so once the tank is low, it will show a red LED, and the servo will open the gate to fill the water. If the LED is green, that means the tank is full, and the servo will close the gate to prevent water flow.
PH Sensor (Joy) : using the water sensor we measure the PH level of the water to insure it is within safe operating levels for irrigation and to insure the good bacteria in the solution do not die from the acidity of the base of the water.
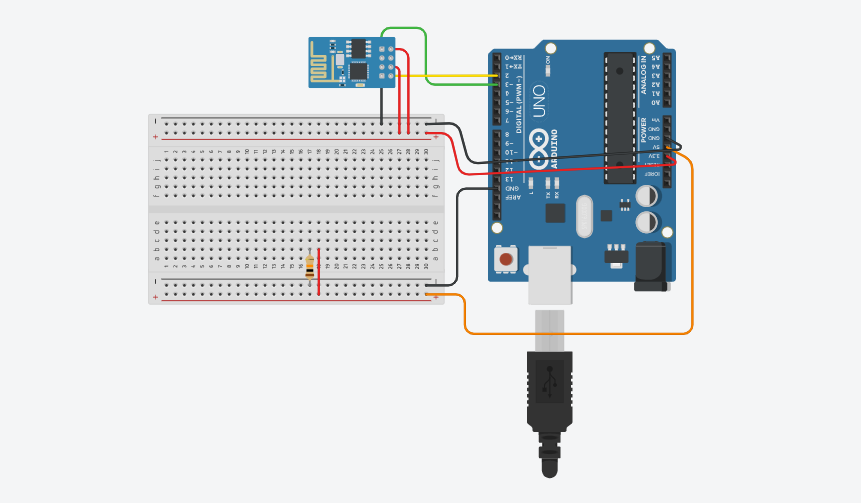
Display Interface(Ivy) : as shown in the project, the system involves a lot of LEDs. To properly understand what is going on, a Bluetooth module was incorporated. This allows anyone with a Bluetooth-enabled device to connect to the system and see what is happening with water levels, PH, and temperature in real time.











_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff)










_t9PF3orMPd.png?auto=compress%2Cformat&w=40&h=40&fit=fillmax&bg=fff&dpr=2)

{kind=link}
{kind=link}
{kind=link}
{kind=link}
Comments