


Hardware Materials
Skateboard Materials
Materials for electric skateboard
44T Drive Wheel Pulley Adapter
TorqueBoards ESC Programming Card
12S UBEC](http://diyelectricskateboard.com/product/12s-ubec/) On/Off Anti-Spark Power Switch
For more detailed information, refer to this URL. http://www.life4iot.com/2015/10/30/electric-skateboard1-materials/?lang=en
Materials for Wi-Fi Receiver
WIZwiki-W7500ECO
WizFi250
Hardware Configuration for Motor control
Already you know,PWM is need to operate DC motor. So I made PWM signal using WIzwiki-W7500ECO board and this picture is configuration for motor control.
You need ESC(for controlling speed of motor) and UBEC(for input 5V to WIZwiki-W7500ECO).
If you refer to this Link, you can get more detail information and download source code for motor test.
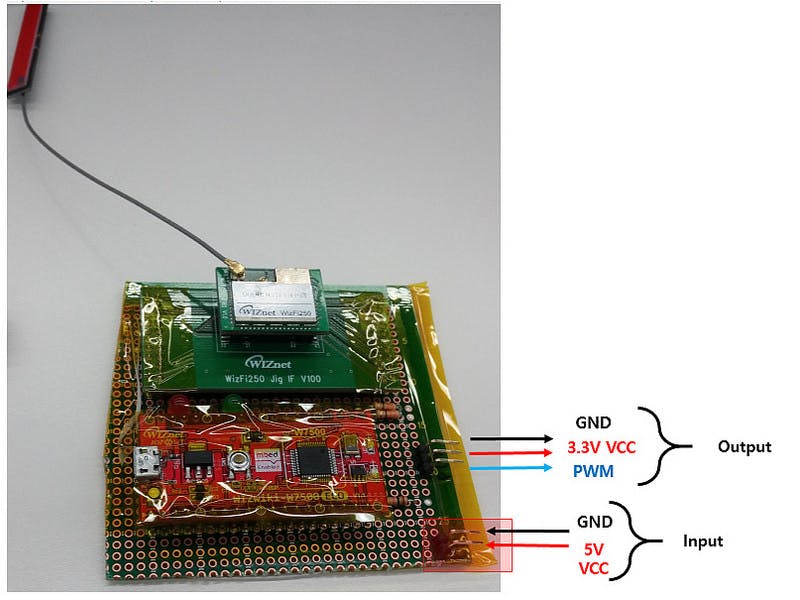
Hardware Configuration for Wi-Fi Receiver
Wi-Fi receiver is device for communicating control data with skateboard. I made Wi-Fi receiver using WizFi250 which is Wi-Fi module by WIZnet. This picture is configuration for Wi-Fi receiver.
I am not hardware engineer so I couldn’t handle hardware well and this hardware may be showing some lack. But it’s operation is very well. In this device,it has 3 output pin and 2 input pin. Input pins are for getting voltage from battery and Output pins are for controlling motor.
Wi-Fi Receiver Firmware
Source Code
Firmware of Wi-Fi receiver is operated as belows. If smartphone push “Speed Up” button, Wi-Fi receiver will increase motor speed and It it push “Speed Down” button, Wi-Fi receiver will decrease motor speed about 5 percentage.
In exception situation like disconnect Wi-Fi or socket, Wi-Fi receiver will stop motor as below. But even if motor is stopped, skateboard can’t stop because it has acceleration.
You can download source code for Wi-Fi receiver at this Link
C++
#include "mbed.h"
#include "Servo.h"
#include "WizFi250Interface.h"
#define SECURE WizFi250::SEC_WPA2_MIXED
#define SSID "Kaizen_Skate"
#define PASS "qwertyuiop"
#define SERVER_PORT 5000
#define STOP_MOTOR 50
#if defined(TARGET_WIZwiki_W7500P)
WizFi250Interface wizfi250(PC_2,PC_3,PC_13,PC_14,PC_12,NC,115200);
Serial pc(USBTX, USBRX);
Servo motor_speed(PC_8); // it used to percentage value ( 0 ~ 1 )
DigitalOut green_led(LED2);
DigitalOut red_led(LED1);
DigitalOut blue_led(LED3);
#endif
#define START_MSG "START"
#define END_MSG "END\n"
#define CONTROL_UP "UPXX"
#define CONTROL_DOWN "DOWN"
#define CONTROL_CRUISER "CRUI"
#define CONTROL_STOP "STOP"
#define STATUS_CMD_OK "OKXX"
#define STATUS_CMD_FAIL "FAIL"
#define CONTROL_MSG_SIZE 19
// Control Pkt Format : START,CONTROL,SPEED_VALUE,END
// START,UPXX,500,END
// Status Pkt Format : START,CONTROL,SPEED_VALUE,STATUS,END
struct control_pkt{
char start_msg[6];
char control_msg[5];
char speed_msg[4];
char end_msg[4];
};
void parse(char buffer[], int *j, char *string);
int main() {
int recv_cnt,j;
volatile float speed_value = 0.5;
char recv_control_msg[100];
char status_msg[100];
control_pkt control;
pc.baud(115200);
green_led = 1; red_led = 1; blue_led = 1;
wizfi250.init();
wizfi250.setAntMode(WizFi250::PCB);
wizfi250.setAddress("192.168.100.2","255.255.255.0","192.168.100.1");
if ( wizfi250.connect(SECURE, SSID, PASS, WizFi250::WM_AP))
{
red_led = 0;
return -1;
}
printf("IP Address is %s\r\n", wizfi250.getIPAddress());
green_led = 0; red_led = 0; blue_led = 0;
TCPSocketServer server;
TCPSocketConnection client;
while(true)
{
if( client.is_connected() == false )
{
green_led = 1; red_led = 1; blue_led = 0;
client.close();
server.close();
if(speed_value == 0.5)
{
server.bind(SERVER_PORT);
server.listen();
printf("\nWait for new connection...\r\n");
server.accept(client);
client.set_blocking(false, 1500);
}
else if(speed_value <= 0.4)
{
printf("Speed decrease +\r\n");
speed_value = 0.5;
motor_speed = speed_value;
}
else
{
printf("Speed decrease -\r\n");
speed_value = 0.5; motor_speed = speed_value;
}
}
else
{
motor_speed = speed_value;
green_led = 0; red_led = 1; blue_led = 1;
//recv_cnt = client.receive_all((char*)recv_control_msg, sizeof(control)-1);
recv_cnt = client.receive_all((char*)recv_control_msg, sizeof(control));
j=0;
parse(recv_control_msg, &j, control.start_msg);
parse(recv_control_msg, &j, control.control_msg);
parse(recv_control_msg, &j, control.speed_msg);
parse(recv_control_msg, &j, control.end_msg);
if(recv_cnt > 0)
{
if( (strncmp(control.start_msg,START_MSG,sizeof(control.start_msg)) != 0) ||
(strncmp(control.end_msg,END_MSG,sizeof(control.end_msg)) != 0) )
{
printf("TEST Error\r\n");
sprintf(status_msg,"%s,%03d,%s,%s\n",START_MSG,int(speed_value*100),STATUS_CMD_FAIL,END_MSG);
client.send_all((char*)status_msg,strlen(status_msg));
continue;
}
if( strncmp(control.control_msg,CONTROL_UP,sizeof(control.control_msg)) == 0 )
{
speed_value += 0.05;
motor_speed = speed_value;
printf("TEST UP %f\r\n",speed_value);
}
else if( strncmp(control.control_msg,CONTROL_DOWN,sizeof(control.control_msg)) == 0)
{
speed_value -= 0.05;
motor_speed = speed_value;
printf("TEST DOWN %f\r\n",speed_value);
}
else if( strncmp(control.control_msg,CONTROL_CRUISER,sizeof(control.control_msg)) == 0)
{
printf("TEST CRUISER\r\n");
speed_value = (float)(atoi(control.speed_msg)) / 100;
motor_speed = speed_value;
}
else if( strncmp(control.control_msg,CONTROL_STOP,sizeof(control.control_msg)) == 0)
{
printf("TEST STOP\r\n");
speed_value = 0.5;
motor_speed = speed_value;
}
else
{
printf("TEST Error 1-2\r\n");
sprintf(status_msg,"%s,%03d,%s,%s\n",START_MSG,int(speed_value*100),STATUS_CMD_FAIL,END_MSG);
client.send_all((char*)status_msg,strlen(status_msg));
continue;
}
sprintf(status_msg,"%s,%03d,%s,%s\n",START_MSG,int(speed_value*100),STATUS_CMD_OK,END_MSG);
client.send_all((char*)status_msg,strlen(status_msg));
}
else
{
sprintf(status_msg,"%s,%03d,%s,%s\n",START_MSG,int(speed_value*100),STATUS_CMD_OK,END_MSG);
client.send_all((char*)status_msg,strlen(status_msg));
}
}
}// while
}
void parse(char buffer[], int *j, char *string) {
//extracts next location string data item from buffer
int i=0;
for (i=0; i<=strlen(buffer); i++) { //TOTAL SIZE OF RETURNED DATA
if ((buffer[*j+i] == ',')||(buffer[*j+i] == '\0' )) { //IF comma or end of string
//comma is the string field delimiter
string[i]=0; //SETS END OF SRTRING TO 0
*j=*j+i+1; //UPDATES to 1 after comma seperated value
break;
} else string[i]=buffer[*j+i]; //Keep adding to the string
}
}Andorid Application
Source Code
https://github.com/kaizen8501/WiFi_Skateboard
Demo Video

Comments