



Hardware components | ||||||
 |
| × | 3 | |||
 |
| × | 1 | |||
 |
| × | 3 | |||
_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff) |
| × | 1 | |||
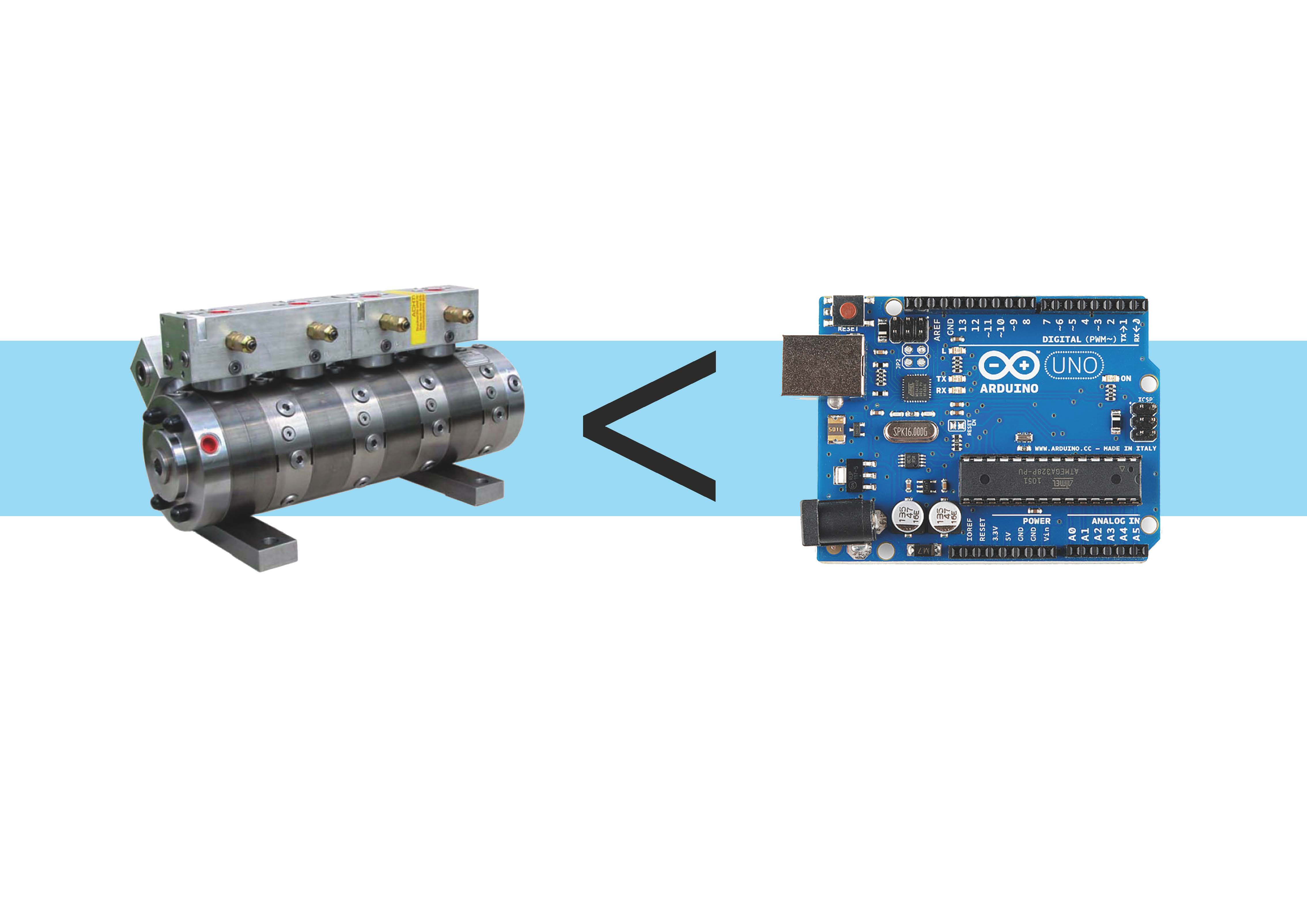
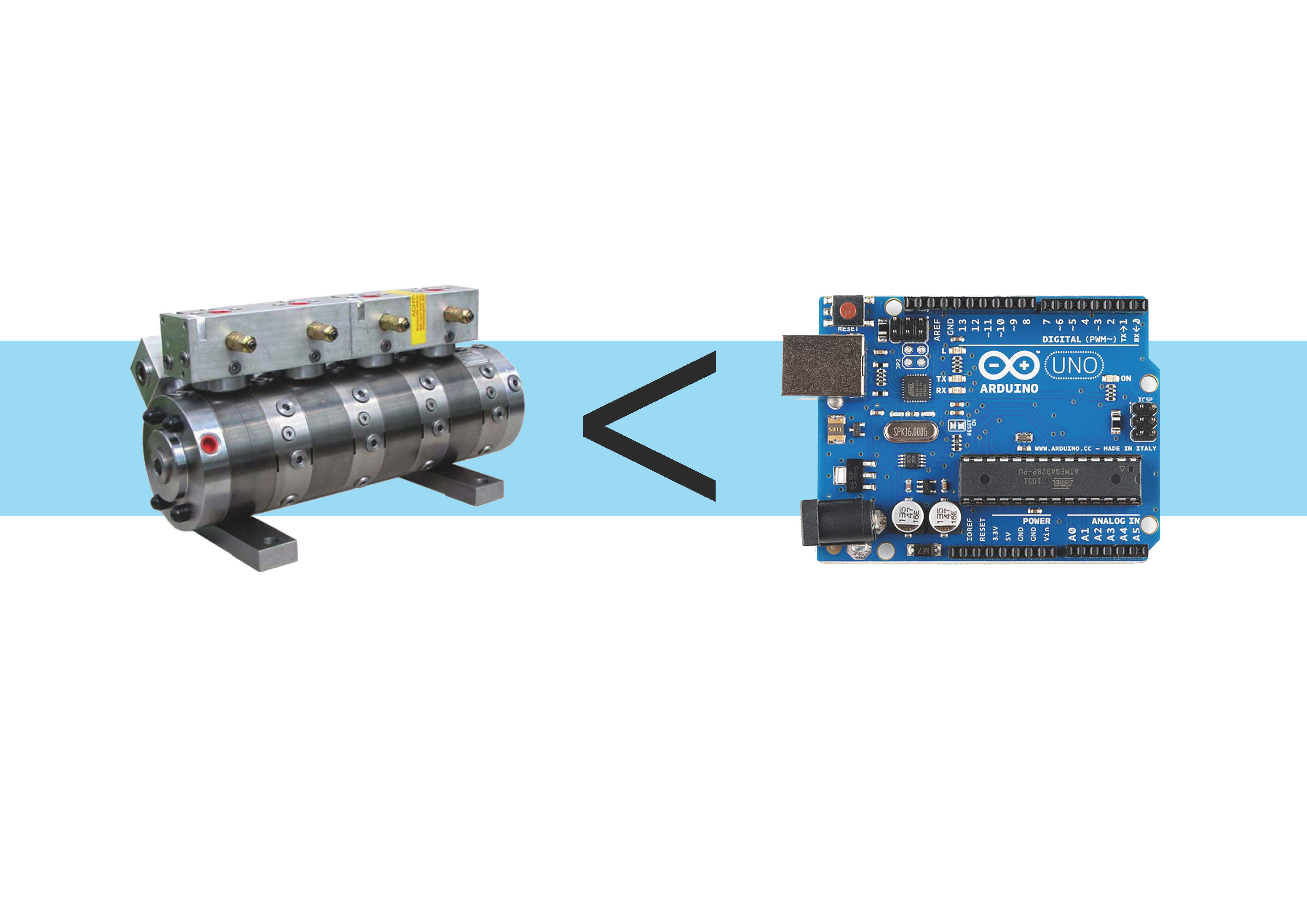
There are many applications in the mechanical world where ensuring hydraulic/pneumatic cylinders have the same flow rate going into them, this usually involves expensive valves that regulate the flow to them.
Not only are these valves expensive and heavy pieces of equipment, but they also have a limit to the flow rate of the fluid through the system.
Graphic showing the flow rate through a rotary flow divider
These valves are also not 100% accurate, you can not use these to ensure exactly the same amount of fluid exits each port, which sucks!
With the code that is given to you below you can control precisely how far each cylinder is extending/retracting. This code does away with these expensive hunks of metal to replace them with smaller expensive parts on the cylinders, but with greater control.
{kind=link}

Comments