


Hardware components | ||||||
_zhWsCcSEcl.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff) |
| × | 2 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
Software apps and online services | ||||||
 |
| |||||
 |
| |||||
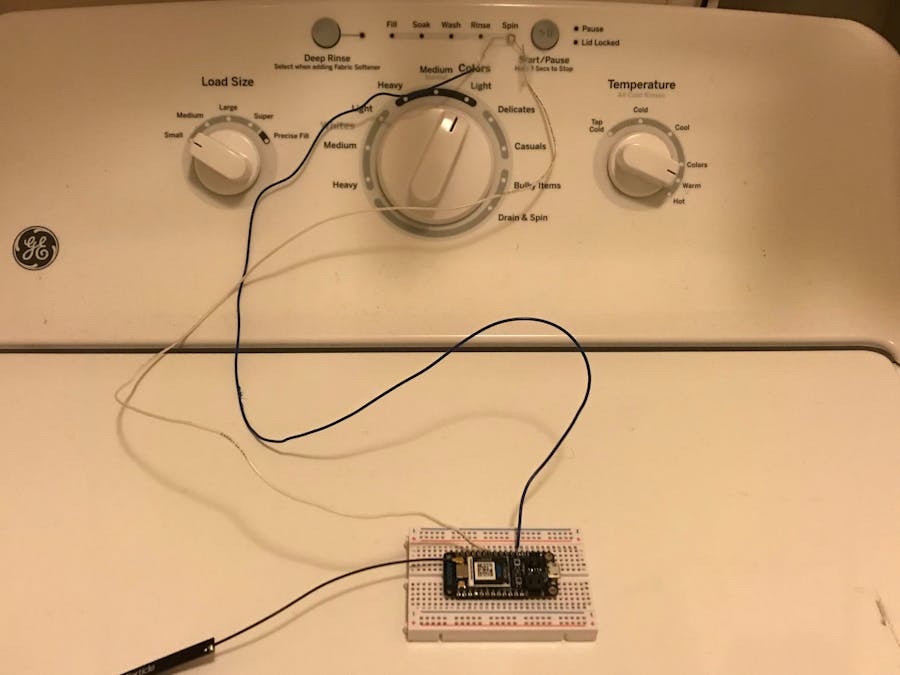
Our washing machine does not notify the user in any way when the cycle is complete. This IOT project monitors the washing machine's final indicator light with a photo resistor and notifies us when the light goes off, indicating a finished cycle.
This project was created for MEGR 3171 Introduction to Measurement and Instrumentation at UNC Charlotte.
VideoData in Google SheetsIn addition to sending a notification on GroupMe, we also use an IFTTT applet to send data to Google Sheets. It collects the date and time of each cycle completion. We then graph the number of cycles per day, as shown below. Here's a link to view live data.
One Particle Argon device (Argon 1) is located above the washing machine. A photo resistor is placed over the spin indicator light and wired into Argon 1, as shown in the connection diagram. Argon 2 is located in the kitchen.
Argon 1 reads the status of the spin light and publishes either "broken" (light is off) or "intact" (light is on). Argon 2 subscribes to the event published by Argon 1. When Argon 2 is notified of a change in the status of the light from on to off it publishes "finished". IFTTT applets are configured to send a GroupMe message and log data to Google Sheets when it sees Argon 2 publish "finished".
Argon 1 is subscribed to Argon 2. Argon 1 illuminates the on board LED when it receives the "finished" event to indicate data has been sent via Argon 2 and IFTTT and that the cycle is complete to anyone standing in the laundry room (since the last indicator light is now partially covered). This achieves bi-directional communication.
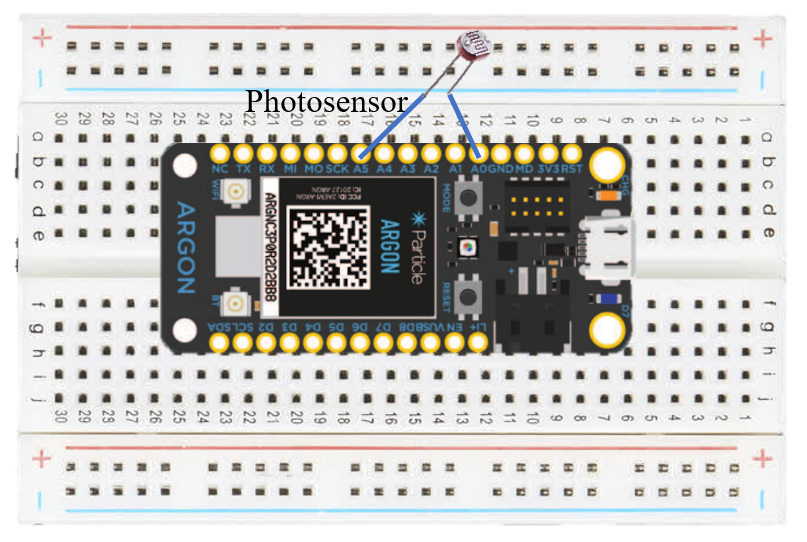
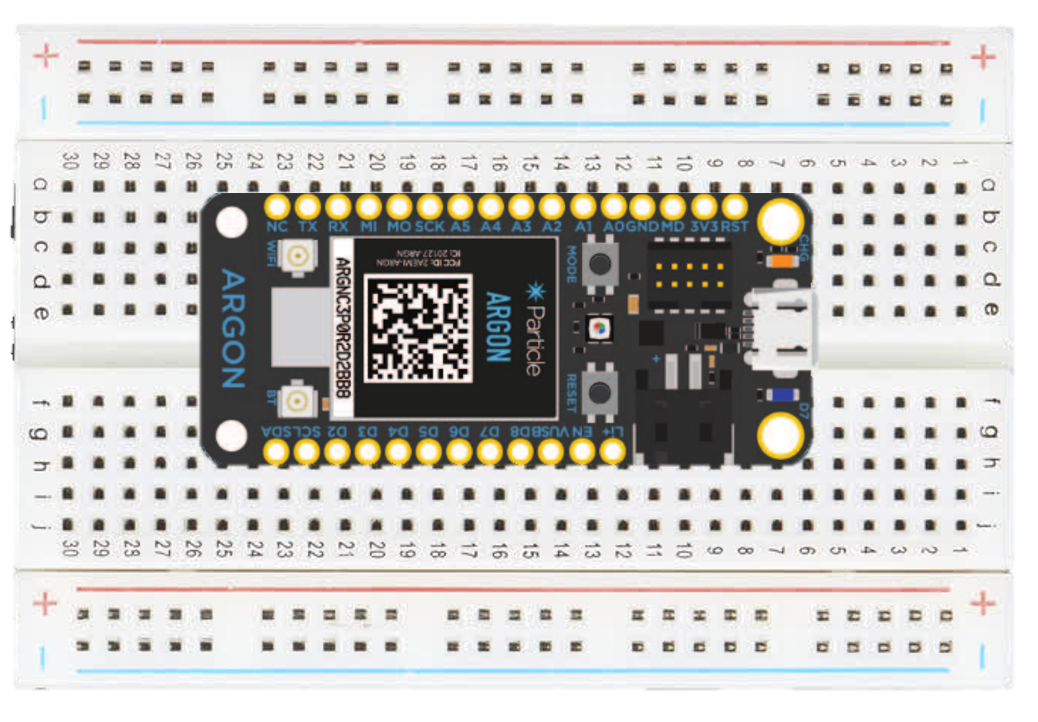
Pictures of both Argons:
Here's a diagram showing the communication between each component.
Note: We used the Wed IDE "Publish and Subscribe with photoresistors or phototransistors" tutorial as base for our code and made modifications as needed.
Argon 1 Schematic









{kind=link}
{kind=link}
Comments