


Hardware components | ||||||
| × | 1 | ||||
| × | 4 | ||||
| × | 4 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 4 | ||||
 |
| × | 1 | |||
Software apps and online services | ||||||
 |
| |||||
Hand tools and fabrication machines | ||||||
 |
| |||||
 |
| |||||
Use of Robots in industries and large scale storage facilities is common in the current century in order to achieve the task in an efficient and fast way. Bue to the current scenario and COVID-19 situations it is now inevitable to employ robots to work due to lack of human resources and social distancing measures.
In an industrial facility, there is a huge demand for the heavy machineries like cranes and forklifts in order to keep the materials one on top of another, this saves space and hence helps the owner to reduce rent. Due to this main reason ladders are used to keep and remove the materials.
Now due to the COVID-19 pandemic, there's a huge disruption in the supply-demand chain and some commodities needs to be stocked as there is no demand and some are getting sold quickly due to panic buy. In order to reduce the spread of coronavirus, we have to follow strict social distancing and some safe health practices. Hence major workforce is unable to work and there's a demand for regular disinfection of materials in the warehouses and supermarkets.
Employing UV radiation radiating robots to disinfect is a good and novel solution to tackle both the human resource and health safety issues. But ground robots are fixed in their motion as they are limited to ground and can cater to an only limited area. The solution I'm proposing here is drone-based and hence can move in a 3D environment. This helps us to move inside deep shelves of cold storage units, large facilities where the materials like food are stacked vertically.
So now in order to localise the drones precisely, we will be using the UWB (Ultra Wide Band Tags) WIth the help of these tiny radios we were able to achieve precise navigation of drones with an accuracy of 10cm. Hence with a proper flight path, we will be able to fly this drone in and around the warehouse facility i.e drone sorties.
Drone with a UWB tag and UV light will be able to achieve this task with good repeatability and can help us to beat COVID-19.
So let's build our flying UV robot.
Step 1: Get things,In order to test the localisation of drones and precision navigation we used parrot bebop drone in initial test runs, this is because there is ROS (Robot Operating System) support for parrot bebop and with the help of APIs we can communicate to parrot bebop to get the data and commands like navigation etc.
Later in order to fit UV LEDs and other peripherals we moved to an F450 sized quadcopter. This has following specifications if anyone is interested to build,
4x 850KVC BLDC motors
4x30A ESCs
1x2200mAh battery
1xRaspberry Pi 3B running ROS
1xFlight controller Board
4x 10x4.5 propellers
Since there are plenty of tutorials on building drones and also this is beyond the scope of our project here I will not describe this in detail.
1. Precision Navigation of the drone with 10cm accuracy
2. UV LED lights or UV CFT lights mounted on the drone
3, 20-30 min flight time based on the height of the racks
4. The end goal is to disinfect racks using UV lights
5. Safety check using Brainium AI module before taking off
STEP 3:Block DiagramThe basic block diagram of the system is as follows.
There will be a predetermined path for the drone to follow which will be guided by the user in the form of UWB coordinates in the x,y format at a fixed height z.
The drone will turn on the UV lights based on the proximity data received by the light controller unit and proximity sensor input by the drone.
STEP 4: UWB navigation and working:UWB tags based localisation can be done in various ways like ToF (Time of Flight) i.e time taken by sent signal and calculating distance from that, TDOA (Time difference of Arrival) this needs synchronous clocks to work etc.
We will use ToF where we will have 1 TAG and 3 ANCHORS. Each anchor sends a message to tag and the time of flight is calculated and then the tag's location is triangulated and sent back to one of the anchors. This is like our very own GPS system in GPS denied environments like indoor and warehouses etc.
The final result would be logged in the form of location data of the drone in XY coordinates
Localisation Principle:
After the Tag obtains its distance from 3 stationary points (r1,r2,r3), knowing the spatial arrangement of the Anchors, we can find the cartesian location in (x,y) of the Tag (Drone) by solving the set of linear equations (Trilateration)
Initial setup for localisation:
Localisation accuracy and results:
If you are more interested in this you can refer to our research paper on this here.
STEP 5: Let's make UWB anchors and TagsIn order to create a local navigation system of UWB, we will need a minimum of 3 anchors 1 tag. There are 2 ways we can create this UWB based anchor tag system, One we can use Arduino pro-micro-based system or another way is to use STM32 based anchors and tags. The basic connection between module and microcontroller is SPI (Serial Peripheral Interface). In order to power the UWB module, we will need a voltage regulator from 5V to 3.3V. We will use AMS1117 for this purpose. The basic schematic for each module is as follows.
The TAG and Anchors are identical in connections and are only different by the code in it.
Since the disinfecting, the environment using UV rays is a proven and tested method I'm not going to invest my time in doing R&D for that i.e reinventing the wheel, I'll be using off the shelf powerful UV LEDs from Optanled, and made a strip out of it. you can use UV LED tubes with driver circuit also. Since I'm flying this whole thing along with drone I preferred the LED option as it is not fragile and driver circuit won't involve heavy elements.
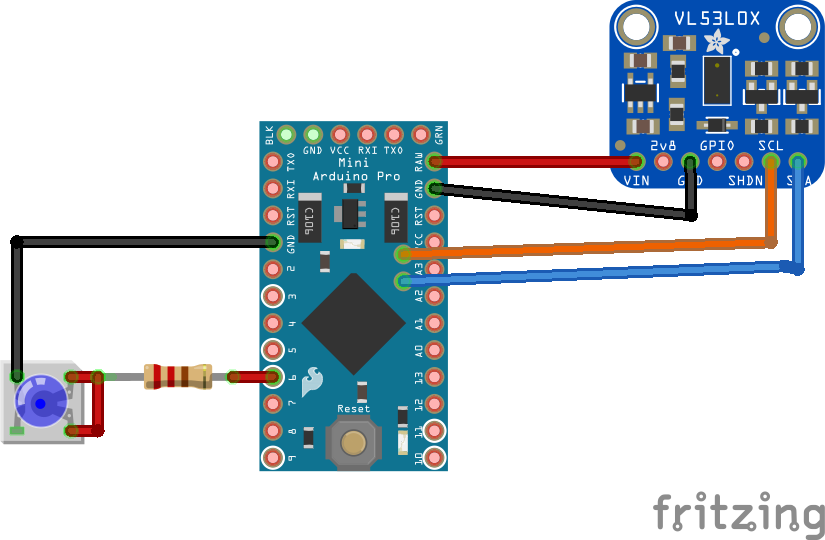
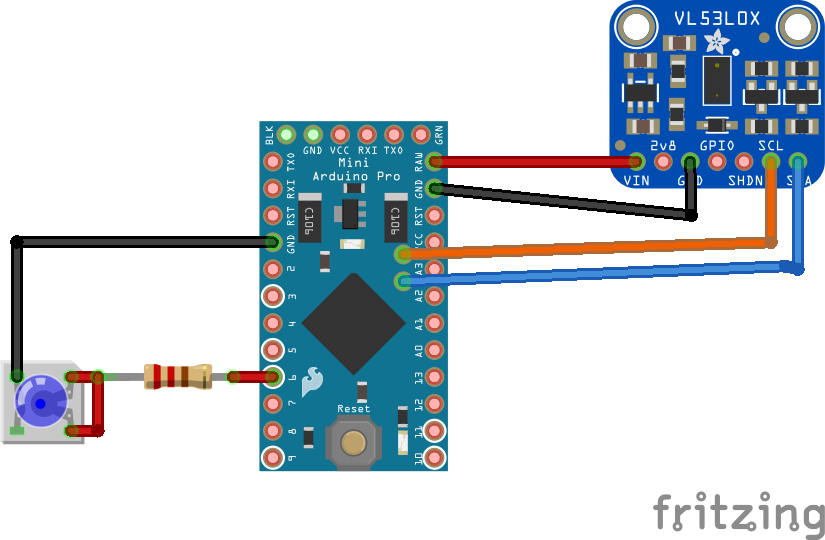
Basic Schematics for LED trigger
Fo the distance sensing we are using Vl53L0X ToF LiDar sensor for accurate measurement of distance. We can set a threshold value to trigger the UV LED depending on the requirement.
Code for this triggering mechanism can be found in the repository.
STEP 7: Drone SafetyA drone is a complex machine and it has to be controlled carefully otherwise it can car fatal injuries or even death. Hence before taking off one should make sure that there are no loose propellers screws etc.
With the help of Artificial Intelligence and Pattern recognition, we built a mechanism to check these broken propellers, loosened screws and broken wires before taking off itself.
In a complex environment like a warehouse, we need to take care of the navigation of the drone otherwise it might even cause accidental fires or injuries hence safety is a major concern.
Here's a working video of detection using Brainium Module.
STEP 8: Working video
With the help of AI and precise UWB localisation we were able to achieve the navigation of drones in GPS denied environments like warehouses in order to facilitate human free disinfection using UV light.
STEP 9: Future Enhancements1. We can add customisable snap fits so that we can exchange different UV lights etc.
2. Autonomous charging to make the whole solution human intervention free

{kind=link}
{kind=link}

Comments