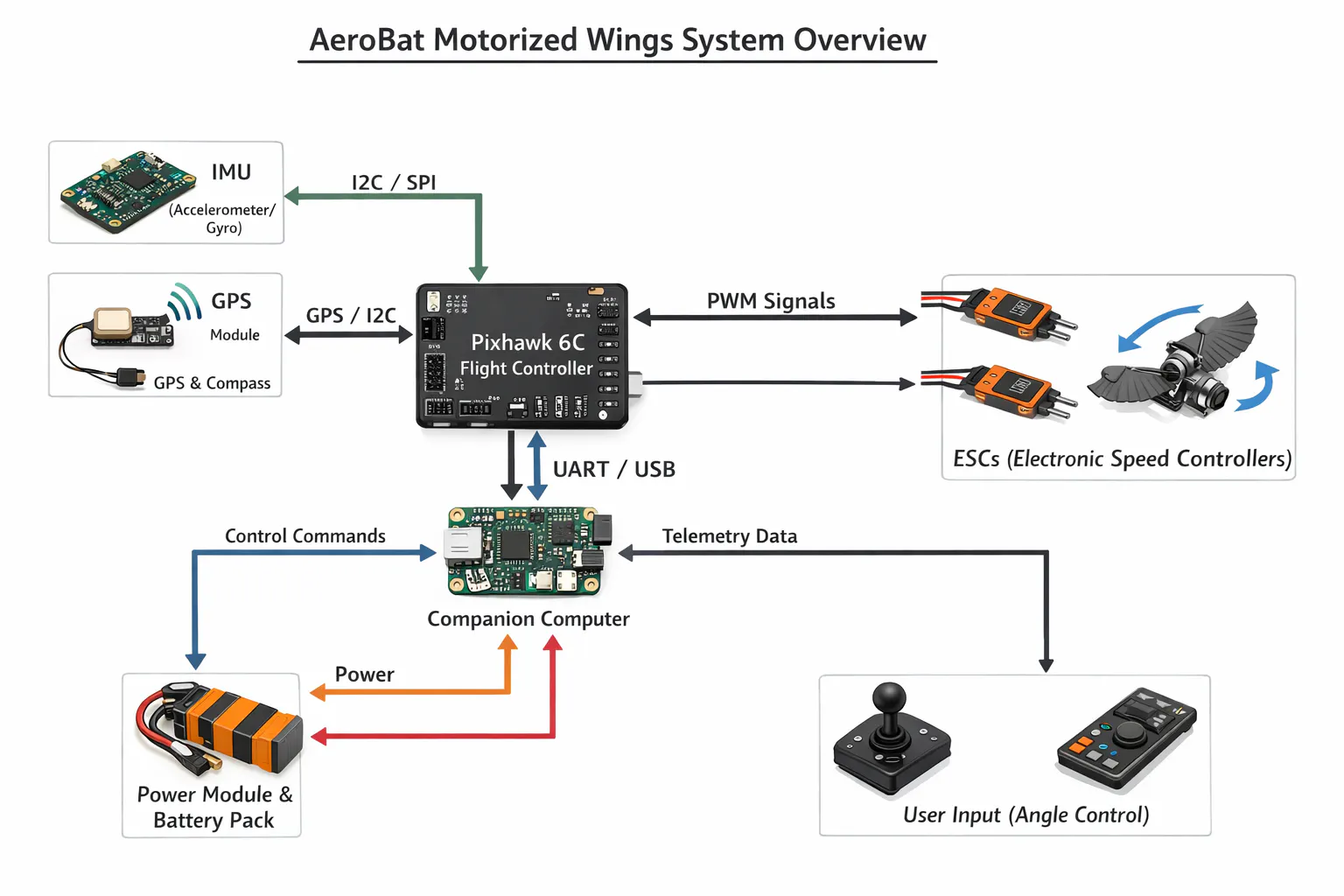
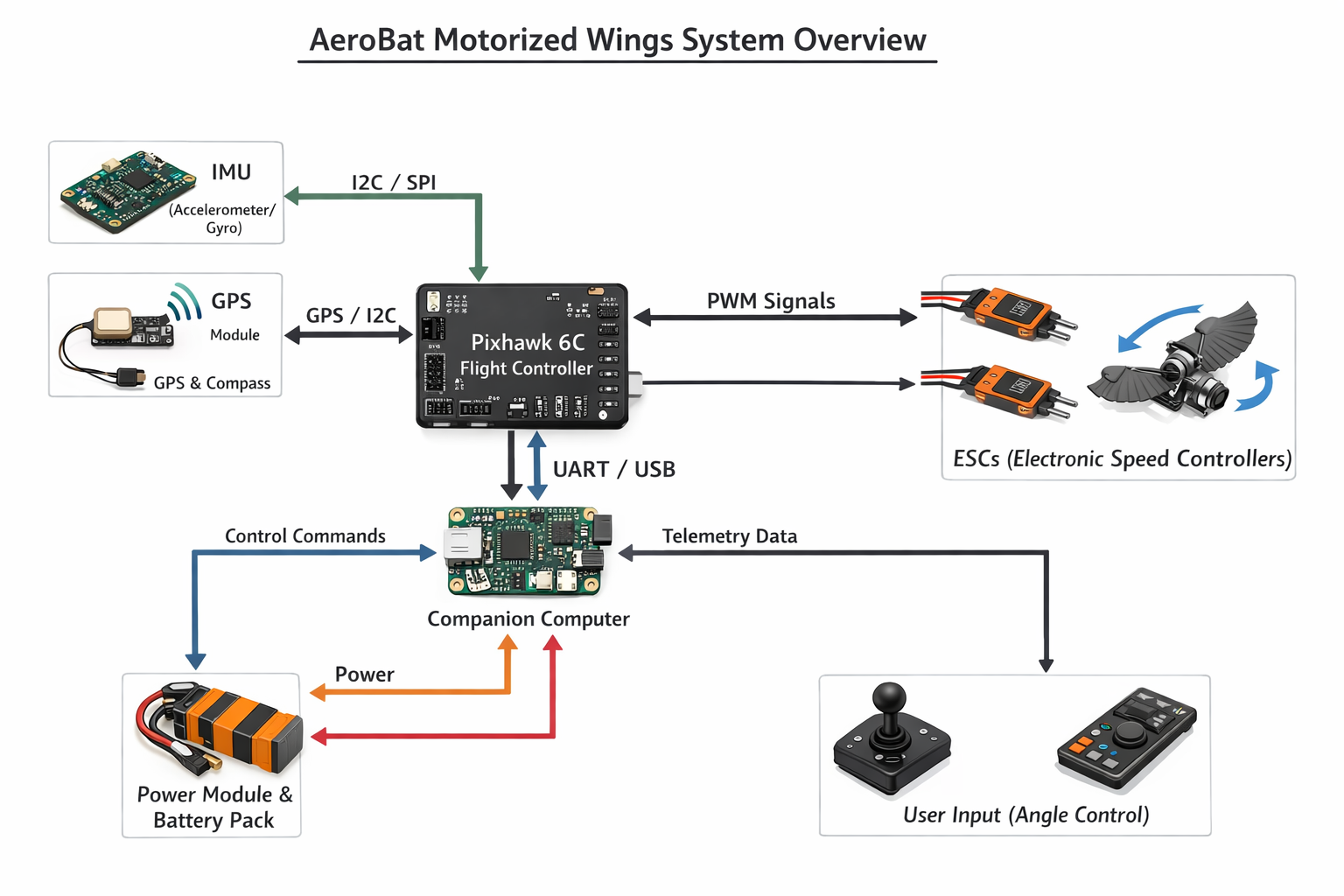
AeroBat: Bee-Inspired Personal Flight PlatformConcept OverviewAccording to physics, humans with wings should not be able to fly because we are not aerodynamic. Interestingly, bees are also not aerodynamically shaped, yet they fly by rapidly flapping their wings and generating vortices that produce lift. Inspired by this, AeroBat is a conceptual personal flight system designed to allow a human to achieve controlled lift through motorized, bee-like wings.The system features four wings, two on each side of the body, attached to a lightweight backpack structure. The wings are not directly flapped by the pilot; instead, the pilot controls their angle relative to the body, while the motor automatically generates high-frequency flapping. For example, 0° wing angle initiates ascent, horizontal wings enable hover, and ~60° allows safe landing. This ensures that even someone without flight training can control their motion safely.Aerodynamic PrinciplesAeroBat operates on unsteady flight mechanics, specifically leading-edge vortices (LEV). Wings flap up and down and also rotate slightly at the end of each stroke, creating low-pressure vortices that significantly increase lift beyond what a fixed wing of similar size would generate. This is how bees, despite their small, non-aerodynamic bodies, can fly.By scaling this principle with wings proportional to the human body, lightweight materials, and motorized flapping, the system can theoretically lift a person. Adjusting the wing angles changes the lift vector, allowing the pilot to move forward, backward, turn, ascend, hover, or descend without manually flapping.Flight Modes (Angle-Controlled Automation)Hover: Wings flap horizontally, CPU adjusts frequency in real-time to maintain altitude.Forward/Backward Translation: Stroke plane tilts automatically; forward motion is achieved by tilting the flapping plane backward, vectoring thrust in accordance with Newton’s third law.Turn (Yaw and Roll): Asymmetrical wing angles or slight frequency changes generate controlled rotation.Landing: Wings inclined ~60°, motor flaps at this angle to slow descent; pilot does not need to flap.Ascent: Wings ~0° or slightly backward; motor increases flapping frequency to generate lift.All modes rely on pilot-controlled wing angles; the motor handles the flapping automatically, mimicking the rapid bee wing movements.Materials and StructureWing veins: Carbon Fiber Reinforced Polymer (CFRP) via 4D printing, providing flexible yet torsion-resistant structure.Membranes: High-strength polyamide or resilin-inspired synthetic fibers; can withstand millions of flaps without fatigue.Actuators: Axial-flow high-power-density motors; flat and lightweight, optimized for rapid flapping.Frame and backpack structure: Lightweight titanium or aluminum alloy, supporting wings and motor, while distributing load evenly on the pilot’s back.The wings are semi-attached, slightly separated from the body, allowing maximum airflow without risking collision with the pilot. This separation, combined with wing flapping speed, ensures adequate lift even for a human body.Safety SystemsInertia Lock: In case of motor or system failure, wings lock in a “V” shape with positive dihedral, allowing autorotation glide and acting as a passive safety parachute.CPU Angle/Frequency Limits: Prevents wings from exceeding safe angles or flapping speeds.Batteries: Solid-state or advanced lithium, with high energy density and low fire risk.Landing Mechanism: Controlled wing angles ensure gradual descent; pilot only manages orientation, not flapping, reducing risk of error.Operational Principles and Micro-DetailsInspired by bees, which have four wings and generate lift via rapid flapping instead of classic aerodynamics.Fast wing flapping in combination with lightweight materials allows lift for a human, who is otherwise non-aerodynamic.Pilot control is angle-based, not flapping-based. Moving a wing to a specific angle triggers automatic motor flapping at the correct frequency.For example, landing involves tilting wings to ~60°, starting motorized flapping automatically, slowing descent. Ascent uses ~0° angle, increasing flapping for lift.Flight adjustments (left/right, forward/backward) are achieved by subtle changes in wing angle and stroke plane tilt, all automated by CPU.Wings are designed to store air between flaps, requiring periodic flapping bursts (~every 30 seconds) to maintain lift, just like insects “recharge” lift.Why It Could WorkBiological Inspiration: Bees overcome poor aerodynamics through high-frequency wing flapping; humans can exploit the same physics with motorized wings.Mechanical Advantage: Wings are moved by motors, not human muscles, multiplying the effective lift generated by each flap.Angle-Based Control: Simplifies piloting; humans only manage wing angles to direct lift and thrust, reducing error and training needs.Material Choice: Lightweight, flexible, yet durable materials prevent structural failure under repeated flaps.Safety Systems: Automatic wing locking, CPU limits, and controlled descent reduce risk, making conceptual flight feasible even for a novice.ConclusionAeroBat is a fully conceptual, bee-inspired personal flight platform, combining motorized wings, intelligent angle control, advanced materials, and safety systems to demonstrate that humans could achieve lift despite non-aerodynamic bodies. The system relies on biomimetic principles, rapid wing flapping, and semi-autonomous control, making flight conceptually possible for a human, with safe hovering, maneuvering, and landing.











{kind=link}
Comments