


Hardware components | ||||||
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
Software apps and online services | ||||||
| ||||||
Hand tools and fabrication machines | ||||||
 |
| |||||
 |
| |||||
An interactive installation for data embodiment.
To offer a point in space to perceive – at a human scale– two major flows that cross Albuquerque: the flowing south of the river and the yearlong birds’ migrations in their planet-wide breathing movements.
Hidden to most of us as we are separated by the urban, artificial environments, these movements represent important indicators for ecological, climatic, and biological health of the land that hosts and sustains the city and beyond.
It uses publicly available datasets for the past year:
BirdCast (https://birdcast.info) by Cornell University, which utilizes weather radars to estimate the number of birds in flight per night during migration periods over New Mexico;
Water flow of the Rio Grande in Albuquerque by United States Geological Survey.(https://waterdata.usgs.gov/monitoring-location/08330000/#parameterCode=00065&period=P7D&showMedian=true)
The installation is also formed by my recent participation with the UNM Turner Lab, which studies the genetic diversity of the Rio Grande fishes and its relations to drought and river flow.
The installation is everchanging and composed of three main parts:
A sculptural piece inspired by the scale of the silvery minnow, that opens and closes based on the Rio Grande water flow.
Light installation made of an LEDs floor that lights up based on birds’ migration data in the region
An online repository for collective memory and investigation
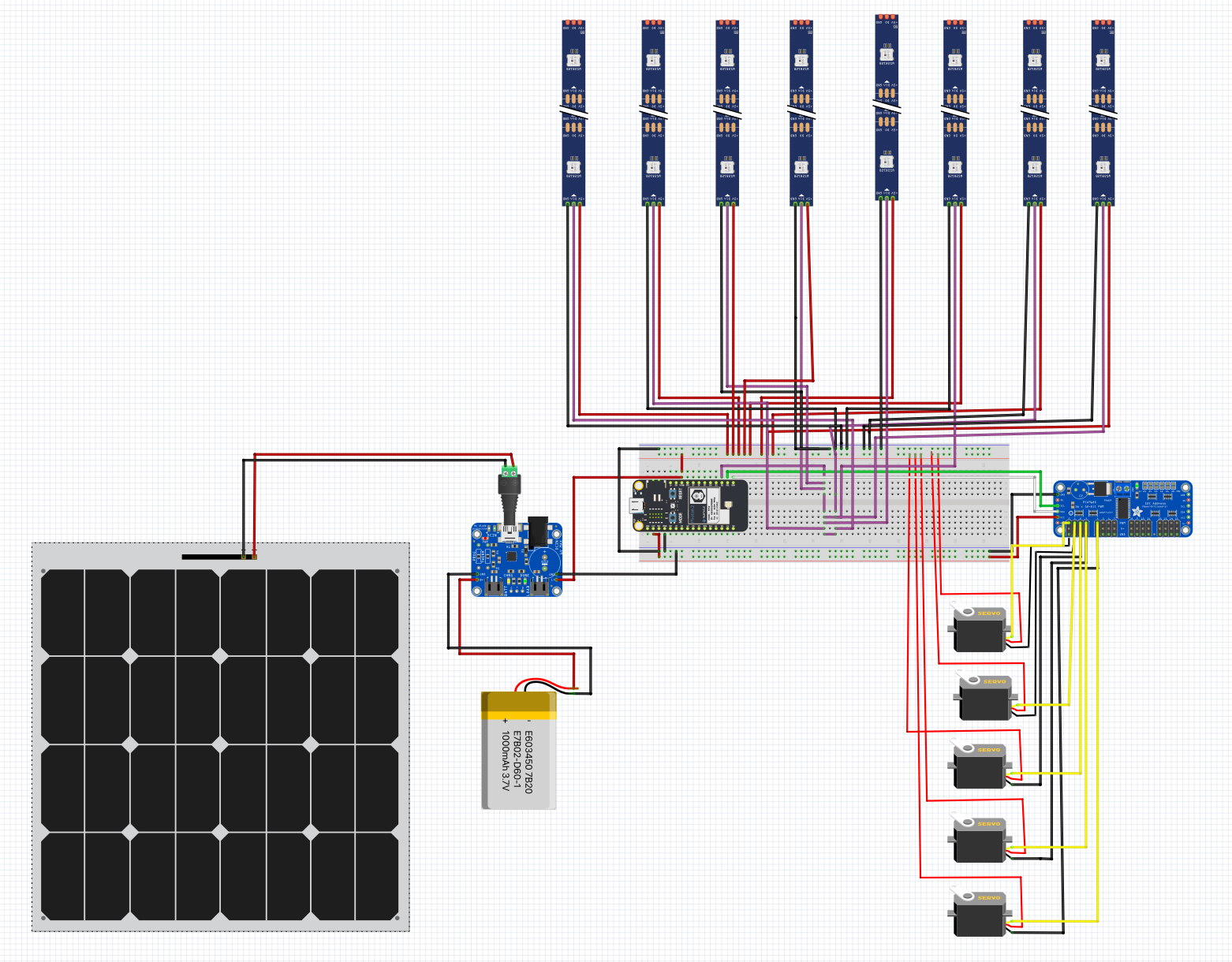
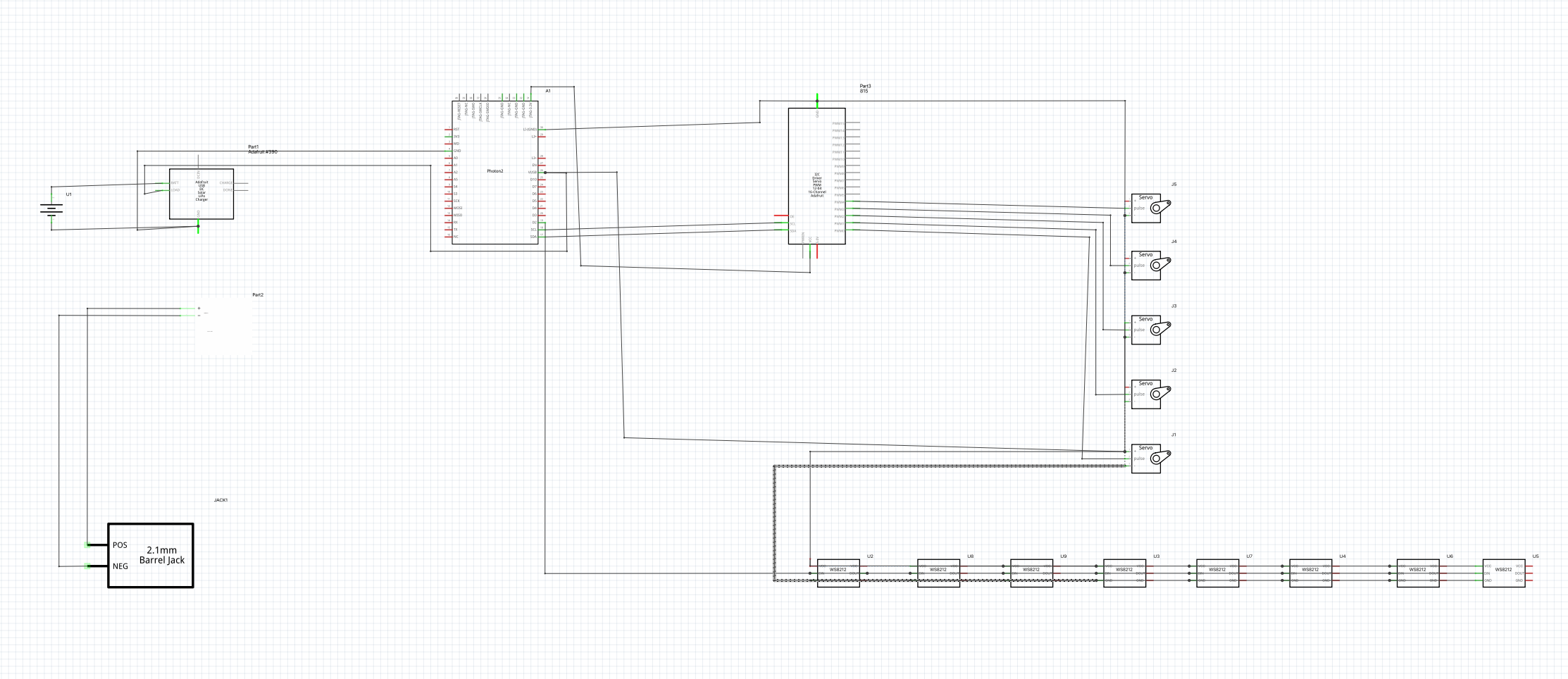
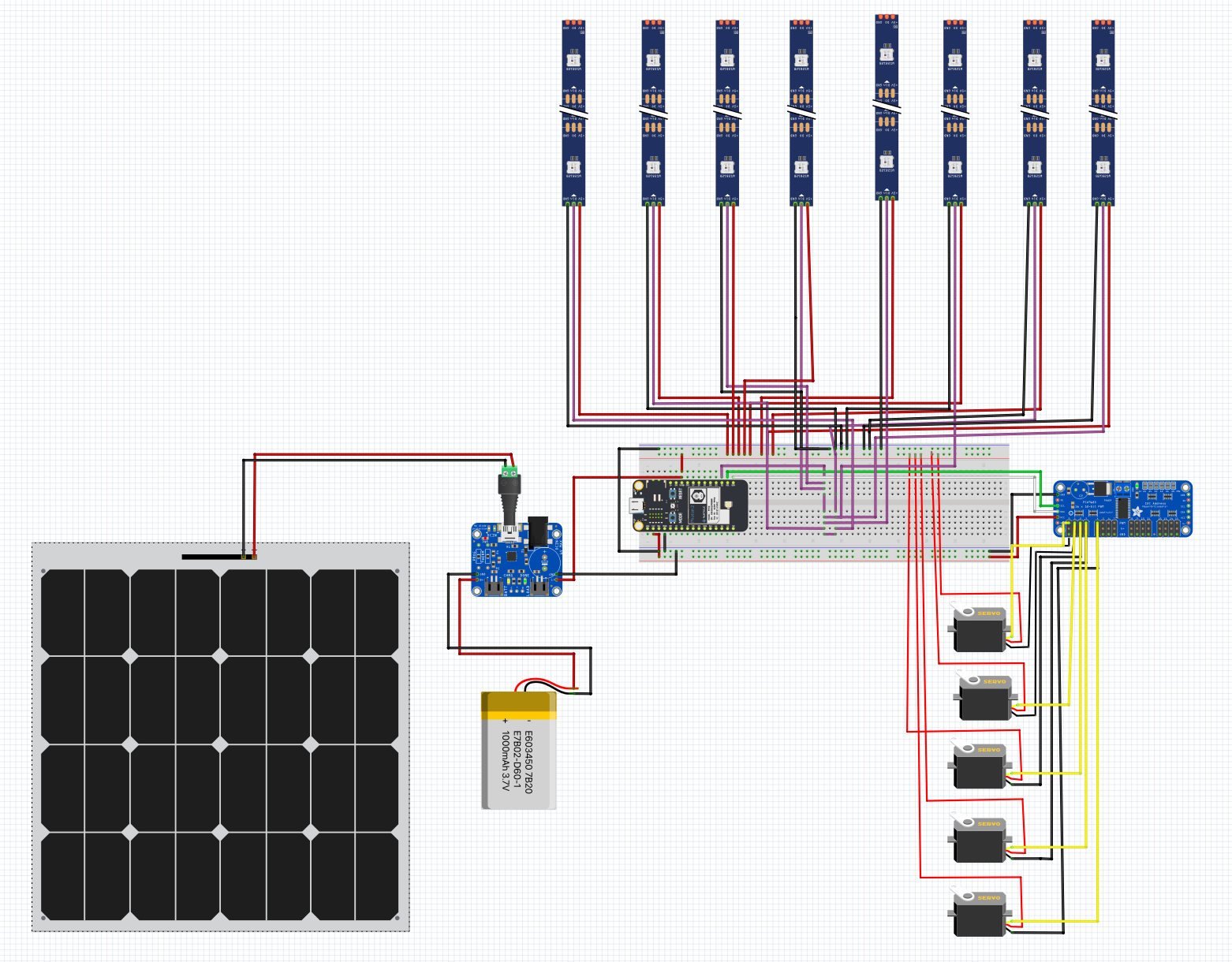
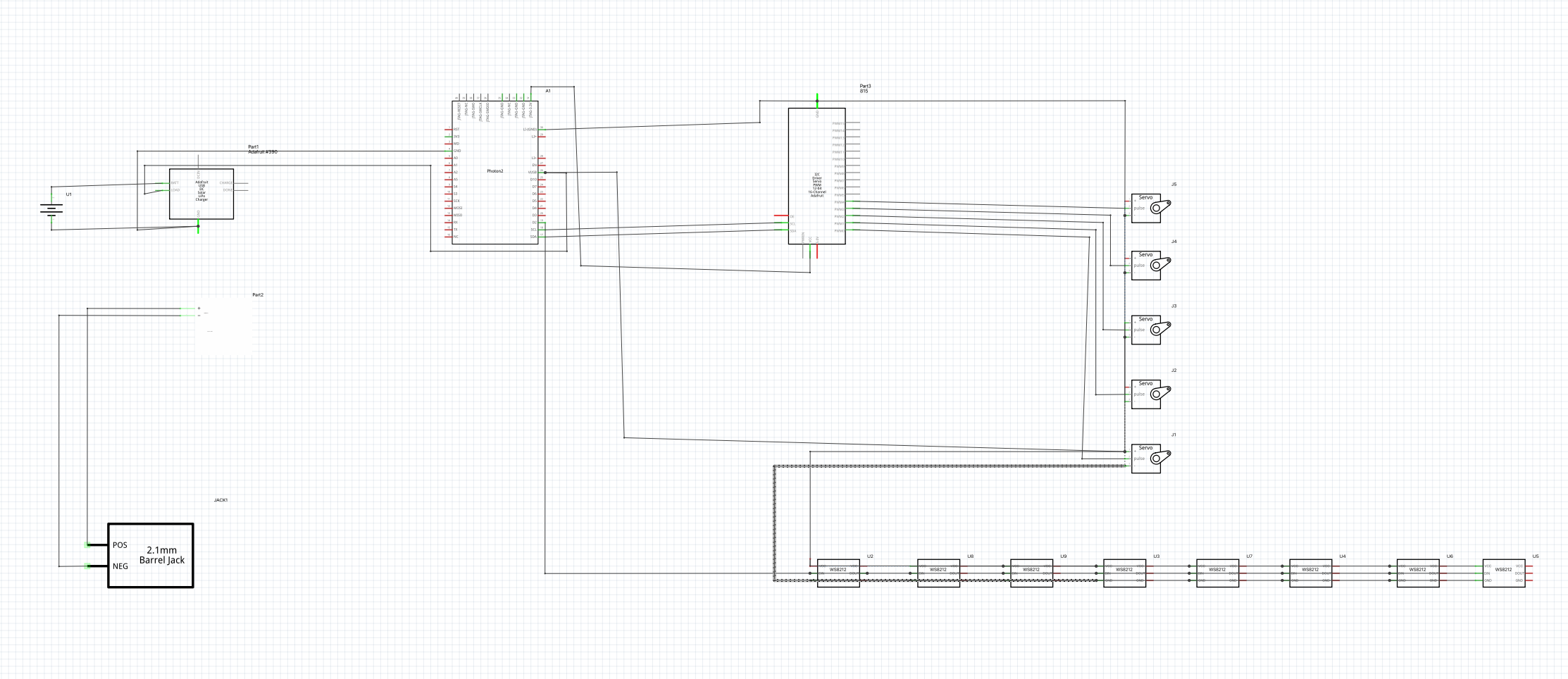
Particle Photon 2
Neopixels WS2812B RGB
MG996R Servo Motors
HiLetgoPCA9685 16 Channel 12-Bit PWM Servo Motor Driver IIC Module
USB / DC / Solar Lithium Ion/Polymer charger
Solar Panel
Battery
Laser cut base – 1/8 in wood & 1/8 acrylic
3D printed holders for servos installation
3D printed connectors for scales
DEMO:This is a small prototype for a bigger public art installation commissioned by the City of Albuquerque for the Spring of 2024.






{kind=link}
{kind=link}
Comments