

Hardware components | ||||||
 |
| × | 1 | |||
 |
| × | 1 | |||
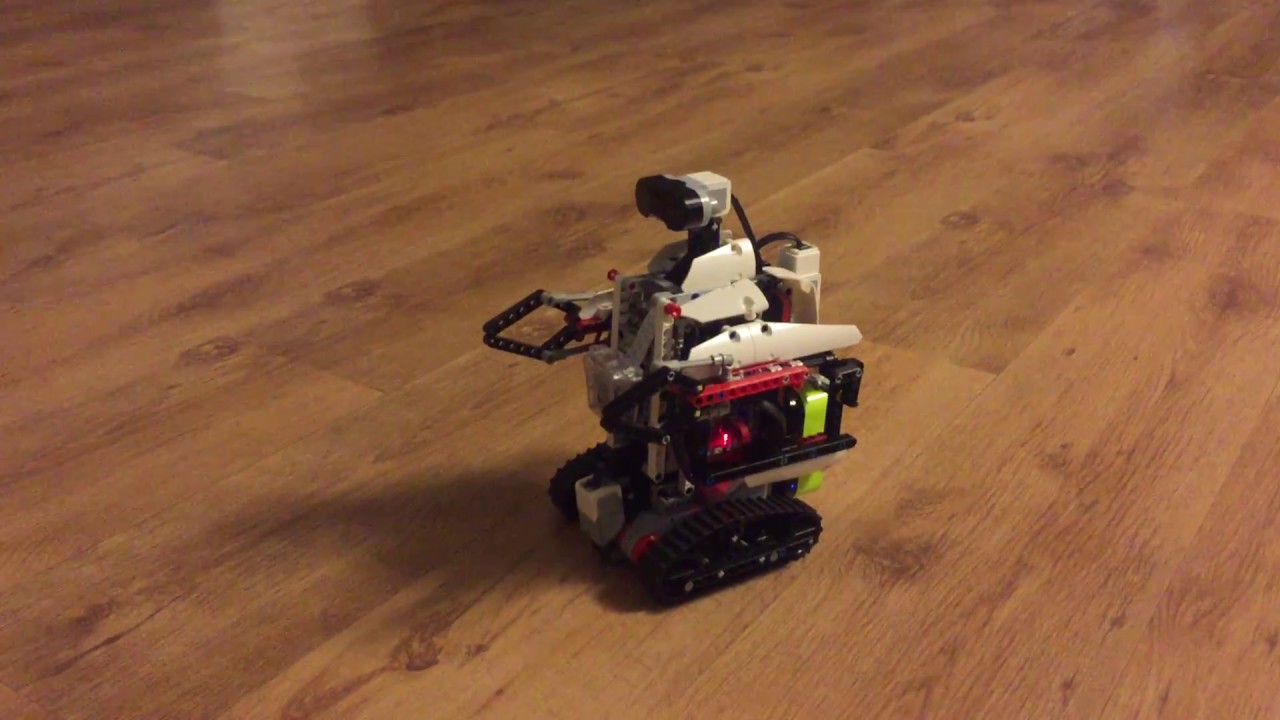
Introduction
Lego Wonderbot powered by Amazon Alexa and Raspberry Pi. It is powered by Lego Mindstorms motors connected to a EV3 module. The EV3 interface Amazon Alexa which is capable of ordering stuff on Amazon.
Design
The robot main function is to order various thing in amazon via voice controlled and in addition there are other function. The robot is capable of moving backward and forward, left , right , and turn 180 degree as show in the below video all via voice controlled with the alexa.
The design of the robot in seperated into three different phase. Alexa setup with Amazon server, the EV3 firmware code, and finally connecting the Alexa command into the EV3. Overall there is two files , the python code that will be used on the EV3 and the nodejs code that will be deploy on the Alexa platform.
The Alexa use an oline platform that allow you to put in the nodejs code directly and compile in realtime. In addition the platform include json model file to allow for alexa to return your command with phrase. This model file is used to make the voice command line.
The EV3 is much simplet to setup then the Alexa. You simply just had to install the necessary IDE and compiler like Visual Studio 2017 and compile the python code in there. Also, make sure that you had the Lego EV3 Mindstorm SDK in the VS2017. Then you simply just paste in the python code and compile/run the code in the EV3. The connection between the Alexa and EV3 is done via Wifi. The instruction can be found here https://www.hackster.io/alexagadgets/lego-mindstorms-voice-challenge-setup-17300f?auth_token=d5421d291a6d25aba9e2cf9d2dac70e8.
Once everthing is connected and ready to go. Your robot should dance and perform various other task.

{kind=link}

Comments