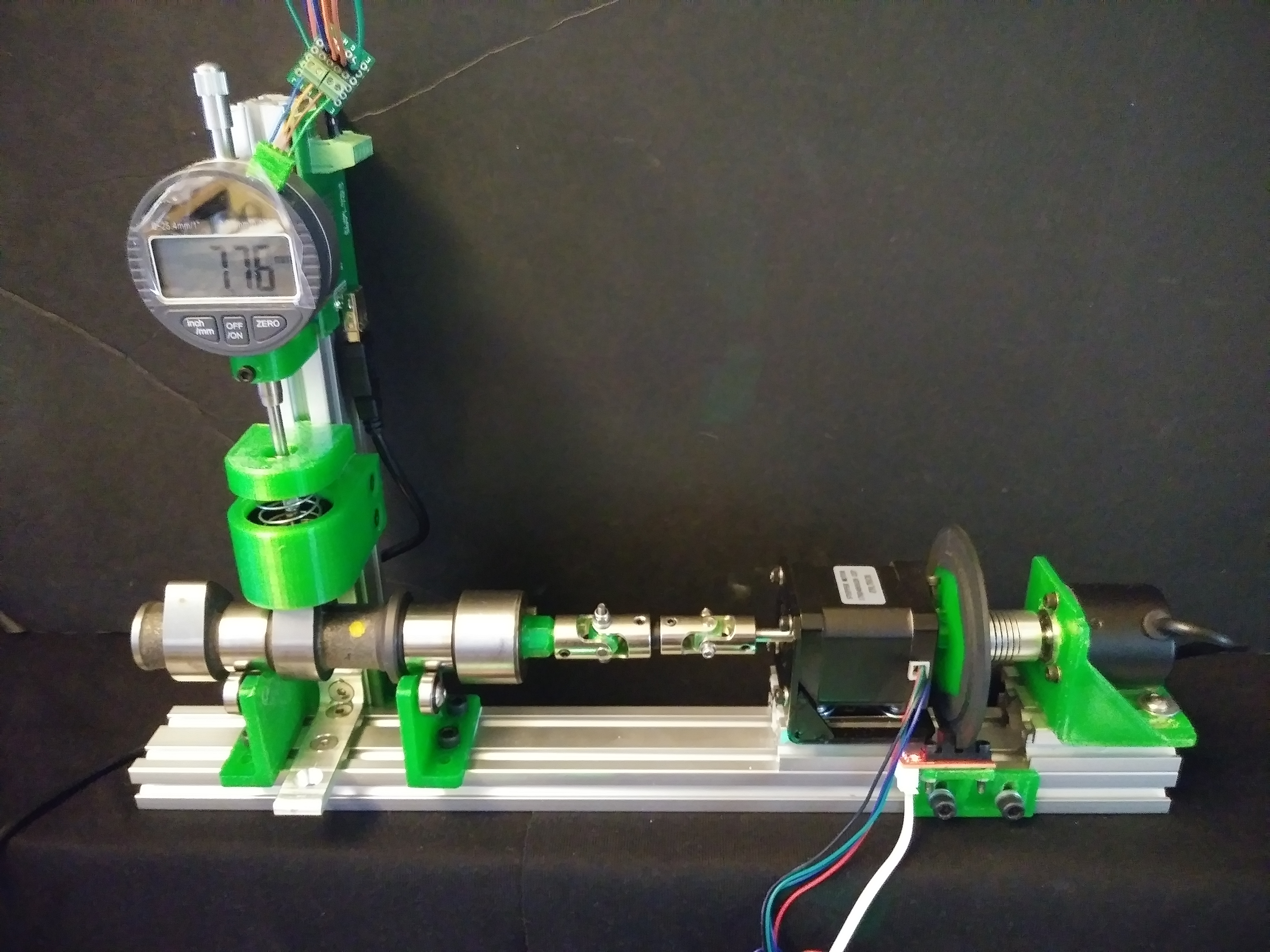
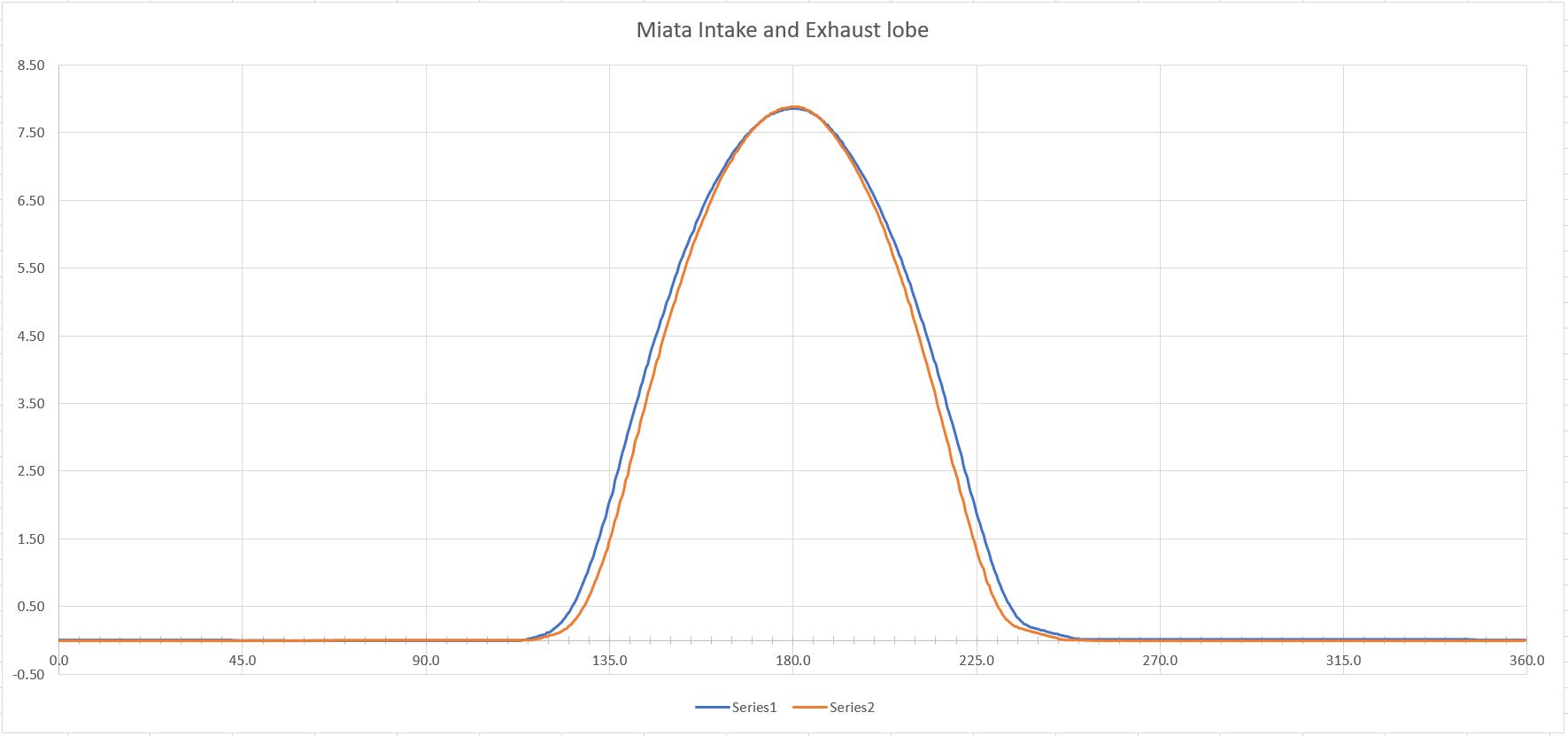
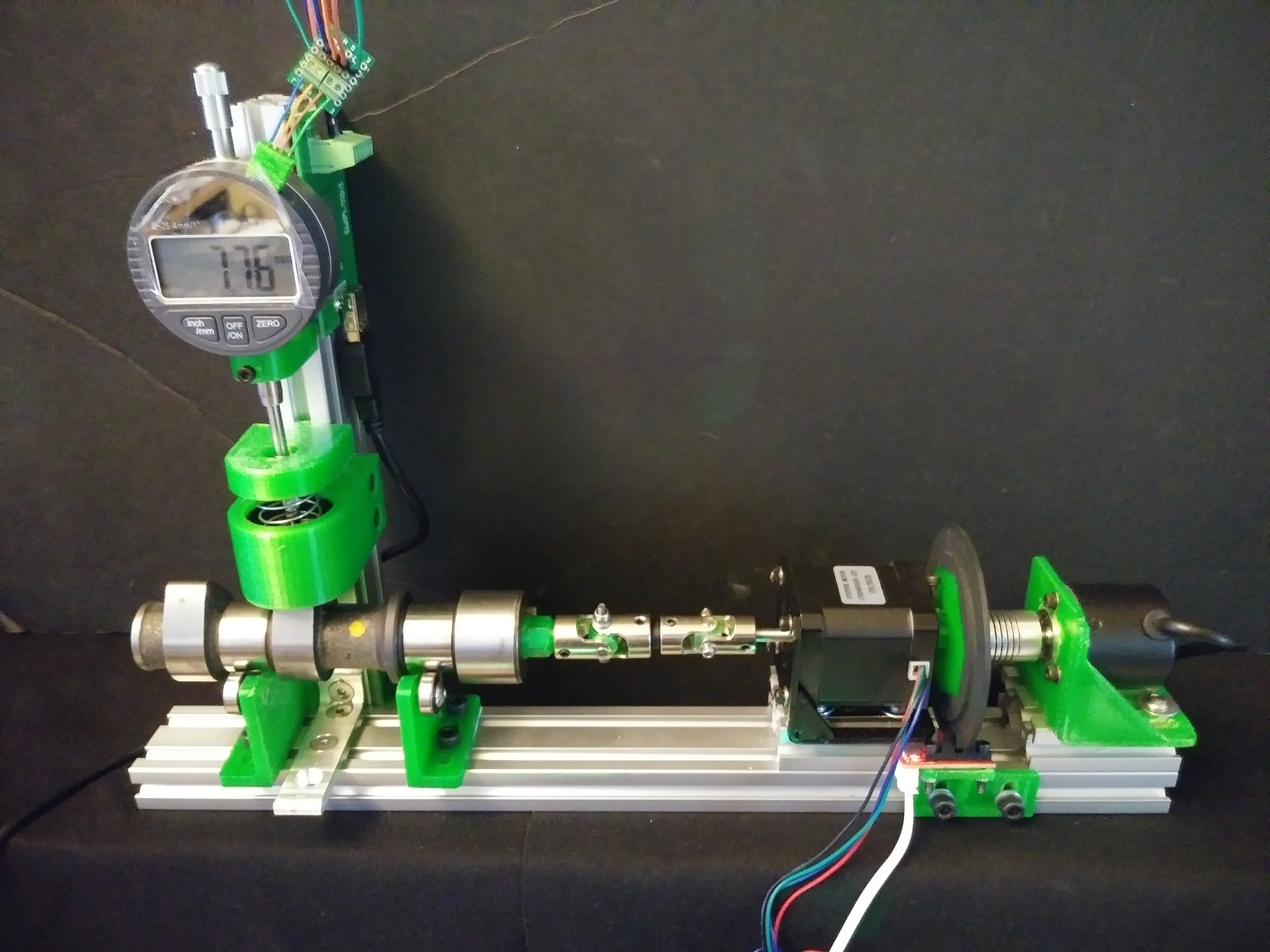
I built this to automate the plotting of camshaft profiles.
30 years ago I sat with a piece of graph paper, a dial indicator, and a degree wheel for several days plotting camshaft profiles for a race engine.
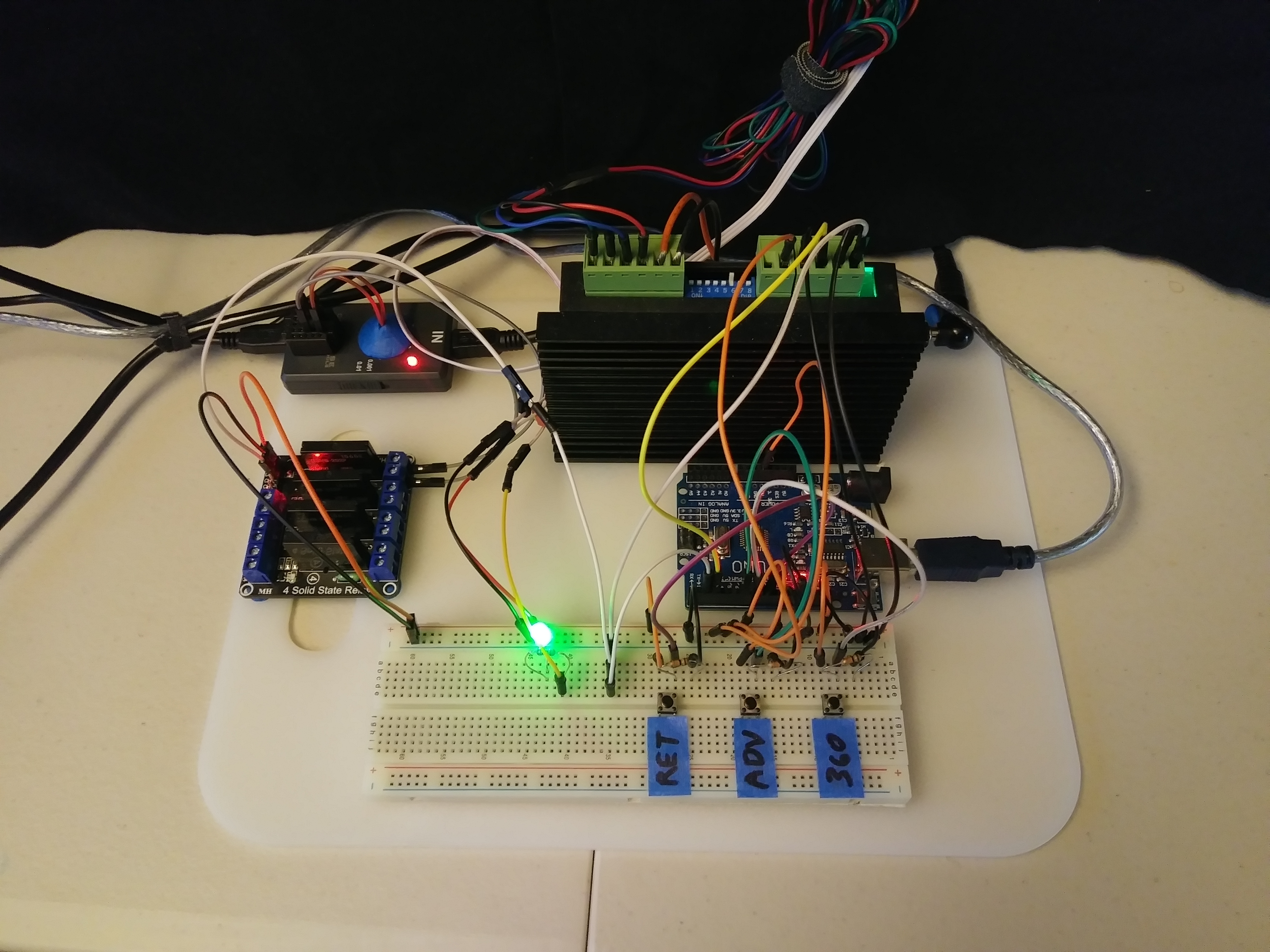
After gaining some experience with stepper motors and microcontrollers I decided to make a tool to do this automatically.
The design is my own, there are a few existing variations of Arduino camshaft measuring tools on the web and I did get inspiration from several of these as well as using modified code from GitHub and and other sources.
I posted a video of this in operation.



_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff)




{kind=link}
{kind=link}
{kind=link}
Comments