/*
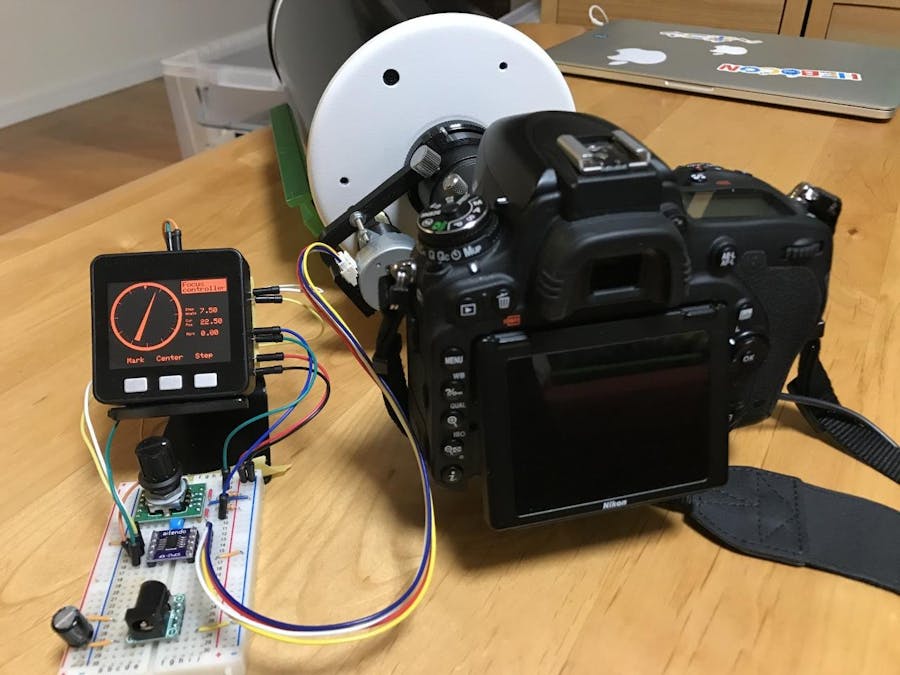
Description: This exmpale can display the encoder gear reading of the PLUS Module and the state of the keys.
*/
#include <Arduino.h>
#include <Ticker.h>
#include <M5Stack.h>
const int IN1 = 16;
const int IN2 = 17;
const int IN3 = 21;
const int IN4 = 22;
const int ECA = 35;
const int ECB = 36;
const int DISP_W = 320;
const int DISP_H = 240;
const int CIR_R = 195 / 2;
const int V_STEP = 32;
const int H_OFST = 115;
const int H_OFS = 70;
const int V_OFS = 83;
const int V_BASE = 80;
uint8_t full_step_table [] = {
0b0101, // 0
0b1001, // 1
0b1010, // 2
0b0110, // 3
};
uint8_t half_step_table [] = {
0b0101, // 0
0b0001, // 1
0b1001, // 2
0b1000, // 3
0b1010, // 4
0b0010, // 5
0b0110, // 6
0b0100, // 7
};
enum {DIR_NONE, DIR_FW, DIR_BW};
enum {MODE_NULL, MODE_FULL, MODE_HALF};
enum {LOOP_FULL = 4, LOOP_HALF = 8};
Ticker seq_tick;
const float toggle_period_sec = 0.3;
volatile bool step_run_flg = false;
volatile int step_run_cnt = 0;
int step_run_dir = DIR_FW;
volatile int tgl_c = 1;
uint8_t *step_table;
int mark1 = 0;
int mark2 = 0;
int cur_pos = 0;
int last_pos = 0;
int step_round = 48;
float step_angle = 360.0 / step_round;
int color_fg = TFT_RED;
int color_bg = TFT_BLACK;
uint8_t step_phase = 0;
uint8_t l_step_phase = 0;
uint8_t step_loop = LOOP_FULL;
uint8_t step_dir = DIR_FW;
uint8_t last_step_dir = DIR_FW;
uint8_t cur_mode = MODE_FULL;
uint8_t ec, last_ec;
void setNextPhase(uint8_t dir)
{
step_dir = dir;
l_step_phase = step_phase;
last_pos = cur_pos;
if (dir == DIR_FW) {
step_phase--;
cur_pos--;
} else {
step_phase++;
cur_pos++;
}
if (cur_pos < 0) {
cur_pos = step_round - 1;
}
step_phase = step_phase % step_loop;
cur_pos = cur_pos % step_round;
}
void setStepIN()
{
int val;
if (cur_mode == MODE_FULL) {
val = full_step_table[step_phase];
} else {
val = half_step_table[step_phase];
}
int in1 = ((val & (0x10 >> 1)) == 0) ? LOW : HIGH;
int in2 = ((val & (0x10 >> 2)) == 0) ? LOW : HIGH;
int in3 = ((val & (0x10 >> 3)) == 0) ? LOW : HIGH;
int in4 = ((val & (0x10 >> 4)) == 0) ? LOW : HIGH;
Serial.printf("%d: %d %d %d %d\n", step_phase, in1, in2, in3, in4);
digitalWrite(IN1, in1);
digitalWrite(IN2, in2);
digitalWrite(IN3, in3);
digitalWrite(IN4, in4);
}
void drawVal(int ofs, float val)
{
M5.Lcd.fillRect(DISP_W - H_OFS - 5, V_OFS + ofs, 70, 24, color_bg);
M5.Lcd.setTextSize(2);
M5.Lcd.setTextColor(color_fg);
M5.Lcd.setCursor(DISP_W - H_OFS - 5, V_OFS + ofs);
M5.Lcd.printf("%.02f", val);
}
void setStepMode(uint8_t mode)
{
if (cur_mode != mode) {
if (mode == MODE_FULL) {
step_table = full_step_table;
step_round = 48;
step_loop = LOOP_FULL;
step_phase /= 2;
step_angle = 360.0 / step_round;
cur_pos /= 2;
Serial.println("FULL step");
} else {
step_table = half_step_table;
step_round = 48 * 2;
step_loop = LOOP_HALF;
step_phase *= 2;
step_angle = 360.0 / step_round;
cur_pos *= 2;
Serial.println("HALF step");
}
cur_mode = mode;
}
drawVal(0, step_angle);
setStepIN();
}
uint8_t readEC()
{
uint8_t a, b;
a = digitalRead(ECA);
b = digitalRead(ECB);
delay(1);
a ^= digitalRead(ECA);
b ^= digitalRead(ECB);
delay(1);
a ^= digitalRead(ECA);
b ^= digitalRead(ECB);
last_ec = ec;
ec = a | b << 1;
if (last_ec == 0b10 && ec == 0b11) {
Serial.println("EC->FW");
return DIR_FW;
} else if (last_ec == 0b11 && ec == 0b10) {
Serial.println("EC->BW");
return DIR_BW;
}
return DIR_NONE;
}
void drawPos(int pos, int color, int fill)
{
int center_x = CIR_R;
int center_y = CIR_R - 2;
float angle = pos * step_angle;
float sx0 = cos((angle - 90) * 0.0174532925);
float sy0 = sin((angle - 90) * 0.0174532925);
float sx1 = cos((angle + 175 - 90) * 0.0174532925);
float sy1 = sin((angle + 175 - 90) * 0.0174532925);
float sx2 = cos((angle + 185 - 90) * 0.0174532925);
float sy2 = sin((angle + 185 - 90) * 0.0174532925);
int x0 = sx0 * (CIR_R - 25) + center_x;
int y0 = sy0 * (CIR_R - 25) + center_y;
int x1 = sx1 * (CIR_R - 25) + center_x;
int y1 = sy1 * (CIR_R - 25) + center_y;
int x2 = sx2 * (CIR_R - 25) + center_x;
int y2 = sy2 * (CIR_R - 25) + center_y;
if (fill) {
M5.Lcd.fillTriangle(x0, y0, x1, y1, x2, y2, color);
} else {
M5.Lcd.drawTriangle(x0, y0, x1, y1, x2, y2, color);
}
drawVal(V_STEP, step_angle * cur_pos);
// Serial.printf("LINE %d, %d\n", pos, color);
}
void drawCircle(int clr)
{
int center_x = CIR_R;
int center_y = CIR_R - 2;
if (clr == 0) {
M5.Lcd.fillCircle(center_x, center_y, CIR_R - 1, color_fg);
}
M5.Lcd.fillCircle(center_x, center_y, CIR_R - 9, color_bg);
for (int i = 0; i < 360; i += 30) {
float sx = cos((i - 90) * 0.0174532925);
float sy = sin((i - 90) * 0.0174532925);
int x0 = sx * (CIR_R - 6) + center_x;
int y0 = sy * (CIR_R - 6) + center_y;
int x1 = sx * (CIR_R - 20) + center_x;
int y1 = sy * (CIR_R - 20) + center_y;
M5.Lcd.drawLine(x0, y0, x1, y1, color_fg);
}
for (int i = 0; i < step_round; i++) {
float deg = i * step_angle;
float sx = cos((deg - 90) * 0.0174532925);
float sy = sin((deg - 90) * 0.0174532925);
int x0 = sx * (CIR_R - 18) + center_x;
int y0 = sy * (CIR_R - 18) + center_y;
// Draw minute markers
M5.Lcd.drawPixel(x0, y0, color_fg);
}
float deg = mark1 * step_angle;
float sx = cos((deg - 90) * 0.0174532925);
float sy = sin((deg - 90) * 0.0174532925);
int x0 = sx * (CIR_R - 13) + center_x;
int y0 = sy * (CIR_R - 13) + center_y;
M5.Lcd.fillCircle(x0, y0, 3, color_fg);
drawPos(cur_pos, color_fg, 1);
}
void countDownSeq()
{
if (step_run_cnt <= 0) {
return;
}
step_run_cnt--;
step_run_flg = true;
if (step_run_cnt == 0) {
seq_tick.detach();
}
}
int blinkCenter(int flg)
{
int next_flg;
M5.Lcd.setTextSize(2);
M5.Lcd.setCursor(80 * 1 + 42, DISP_H - 30);
if (flg == 0) {
M5.Lcd.fillRect(80 * 1 + 38, DISP_H - 33, 77, 20, color_bg);
M5.Lcd.setTextColor(color_fg);
next_flg = 1;
} else {
M5.Lcd.fillRect(80 * 1 + 38, DISP_H - 33, 77, 20, color_fg);
M5.Lcd.setTextColor(color_bg);
next_flg = 0;
}
M5.Lcd.print("Center");
return next_flg;
}
void setup() {
M5.begin();
// M5.Power.begin();
dacWrite(25, 0); // STOP SP
digitalWrite(IN1, 0);
digitalWrite(IN2, 0);
digitalWrite(IN3, 0);
digitalWrite(IN4, 0);
pinMode(IN1, OUTPUT);
pinMode(IN2, OUTPUT);
pinMode(IN3, OUTPUT);
pinMode(IN4, OUTPUT);
pinMode(ECA, INPUT);
pinMode(ECB, INPUT);
readEC();
M5.Lcd.setTextColor(color_fg);
M5.Lcd.setTextSize(1);
M5.Lcd.setCursor(DISP_W - H_OFST, V_BASE);
M5.Lcd.print("Step");
M5.Lcd.setCursor(DISP_W - H_OFST, V_BASE + 12);
M5.Lcd.print("Angle");
setStepMode(MODE_FULL);
drawCircle(0);
M5.Lcd.fillRect(DISP_W - H_OFST - 8, 2, 124, 35, color_fg);
M5.Lcd.setTextColor(color_bg);
M5.Lcd.setTextSize(2);
M5.Lcd.setCursor(DISP_W - H_OFST - 5, 5);
M5.Lcd.print("Focus");
M5.Lcd.setCursor(DISP_W - H_OFST - 5, 20);
M5.Lcd.print("controller");
M5.Lcd.setCursor(DISP_W - H_OFST - 4, 5);
M5.Lcd.print("Focus");
M5.Lcd.setCursor(DISP_W - H_OFST - 4, 20);
M5.Lcd.print("controller");
M5.Lcd.setTextColor(color_fg);
M5.Lcd.setTextSize(1);
M5.Lcd.setCursor(DISP_W - H_OFST, V_BASE + V_STEP);
M5.Lcd.print("Cur");
M5.Lcd.setCursor(DISP_W - H_OFST, V_BASE + V_STEP + 12);
M5.Lcd.print("Pos");
M5.Lcd.setTextSize(1);
M5.Lcd.setCursor(DISP_W - H_OFST, V_BASE + V_STEP * 2 + 6);
M5.Lcd.print("Mark");
drawVal(V_STEP * 2, step_angle * mark1);
M5.Lcd.setTextSize(2);
M5.Lcd.setTextColor(color_fg);
M5.Lcd.setCursor(80 * 0 + 42, DISP_H - 30);
M5.Lcd.print("Mark");
M5.Lcd.setCursor(80 * 2 + 67, DISP_H - 30);
M5.Lcd.print("Step");
// M5.Lcd.setCursor(80 * 1 + 42, DISP_H - 30);
// M5.Lcd.print("Center");
blinkCenter(0);
}
void loop() {
if (step_run_cnt > 0 || step_run_flg) {
if (step_run_flg) {
setNextPhase(step_run_dir);
drawPos(last_pos, color_bg, 1);
drawPos(cur_pos, color_fg, 1);
setStepIN();
tgl_c = blinkCenter(tgl_c);
step_run_flg = false;
}
if (step_run_cnt == 0) {
blinkCenter(0);
}
delay(10);
} else {
M5.update();
if (M5.BtnA.wasPressed()) {
Serial.println("Mark");
mark1 = cur_pos;
drawVal(V_STEP * 2, step_angle * mark1);
drawCircle(1);
} else if (M5.BtnB.wasPressed()) {
int pos_diff;
if (cur_pos >= mark1) {
pos_diff = cur_pos - mark1;
step_run_dir = DIR_FW;
} else {
pos_diff = mark1 - cur_pos;
step_run_dir = DIR_BW;
}
if (pos_diff > step_round / 2) {
pos_diff = step_round - pos_diff;
step_run_dir = (step_run_dir == DIR_FW) ? DIR_BW : DIR_FW;
}
step_run_cnt = pos_diff / 2;
Serial.printf("Center: diff %d %d", step_run_cnt, step_run_dir);
tgl_c = 1;
seq_tick.attach(toggle_period_sec, countDownSeq);
} else if (M5.BtnC.wasPressed()) {
Serial.print('C');
int next_mode = (cur_mode == MODE_FULL) ? MODE_HALF : MODE_FULL;
setStepMode(next_mode);
drawCircle(1);
}
uint8_t ec_dir = readEC();
if (ec_dir != DIR_NONE) {
setNextPhase(ec_dir);
drawPos(last_pos, color_bg, 1);
drawPos(cur_pos, color_fg, 1);
setStepIN();
}
}
}


 vany5921
vany5921
Comments