


Hardware components | ||||||
 |
| × | 1 | |||
 |
| × | 4 | |||
| × | 1 | ||||
| × | 4 | ||||
| × | 2 | ||||
Software apps and online services | ||||||
 |
| |||||
Hand tools and fabrication machines | ||||||
 |
| |||||
I saw Collinear Mecanum Drive.on youtube and found it very interesting, so I tried to see if we could implement a university laboratory-level project using the M5 series.
How to make1. Obtain a Mecanum wheel.
2. Attach the mecanum wheel via a hub printed by a 3D printer.
3. Print the housing with a 3D printer
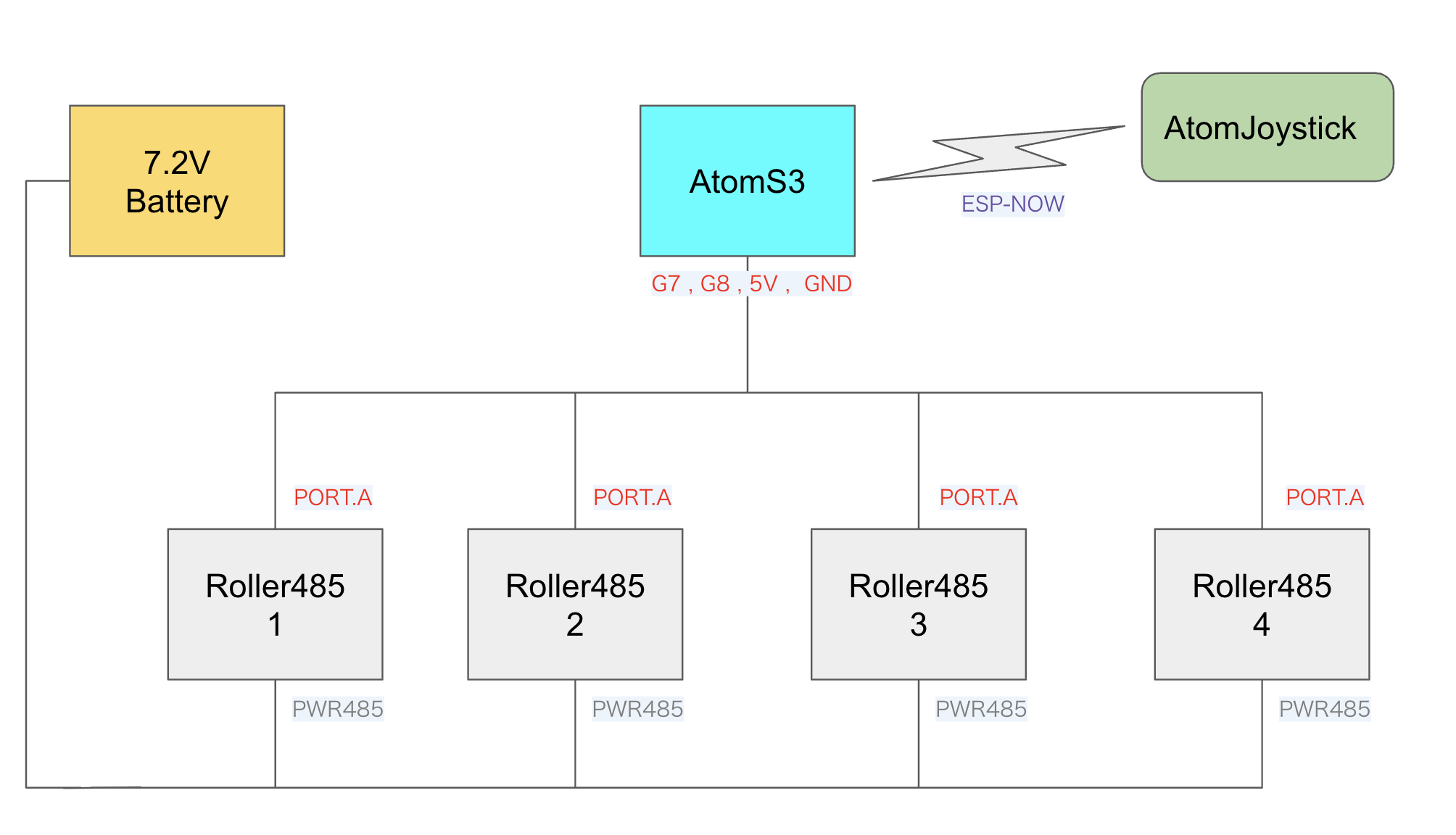
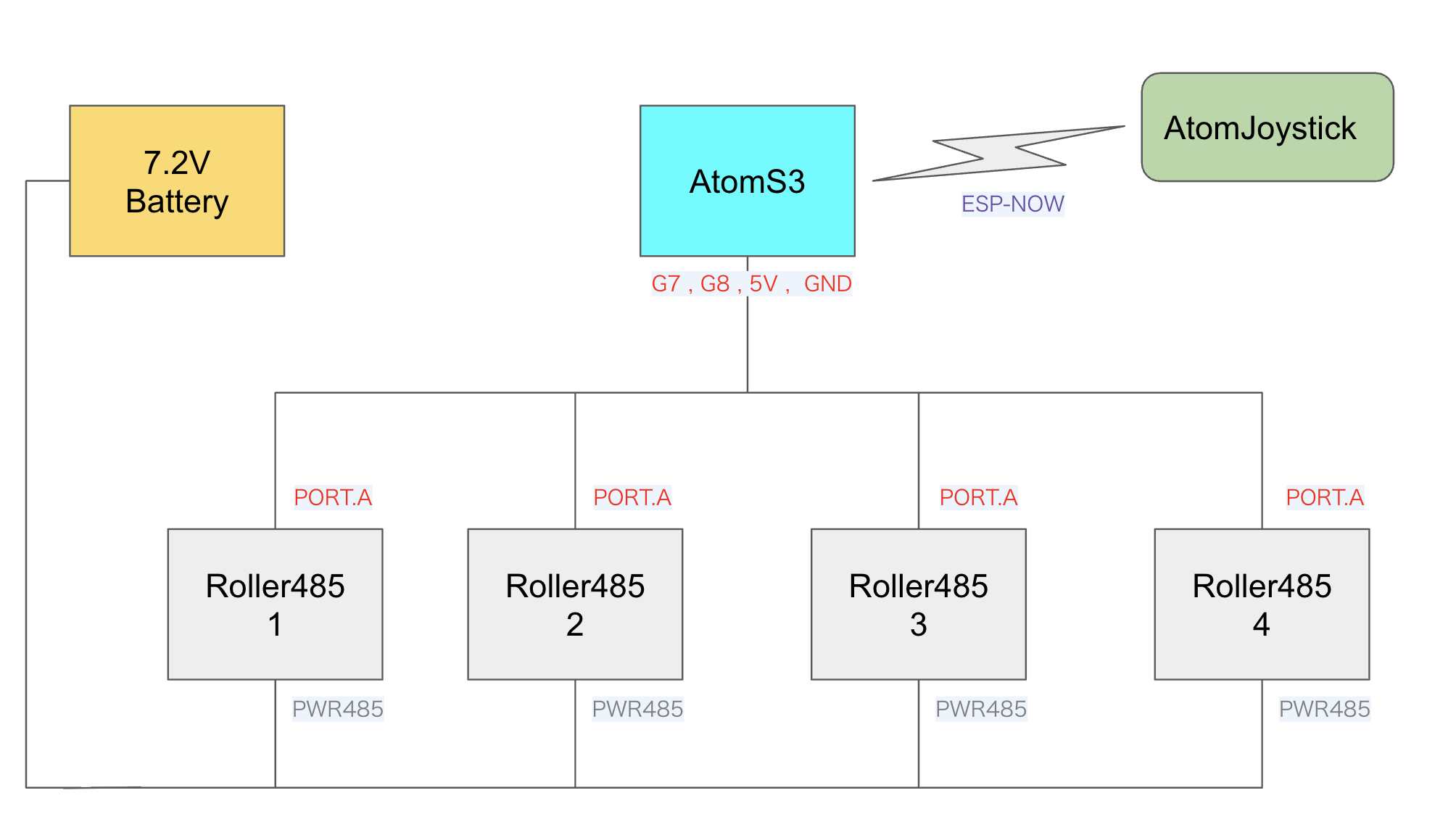
4. Wire the battery, AtomS3, and Roller485
5. Upload the program
6.One battery is sufficient. The second battery is a dummy used to balance the weight.
How to operate1.(only for the first time) Turn on the power while pressing the AtomS3 button on the AtomJoystick, then turn on the power of the inverted pendulum and pair it with the AtomJoystick.
2. Press the right button on the AtomJoystick to start the inverted pendulum.
3. Press the left button on the AtomJoystick to switching between world space and local space, it is possible to move in a certain direction while rotating.
Added 2025/07/21I made an 80mm diameter mecanum wheel version.
The motor part of the Roller485 is built into the wheel.
The top panel looked lonely when the hardware was housed inside the chassis, so I added a logo.
It seems to be more maneuverable than the 60mm version.




{kind=link}
Comments