



Hardware components | ||||||
 |
| × | 2 | |||
 |
| × | 1 | |||
 |
| × | 2 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
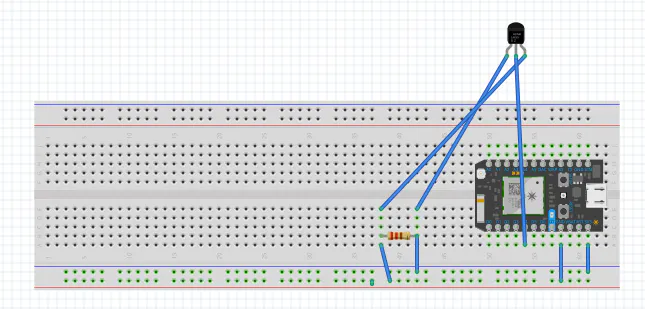
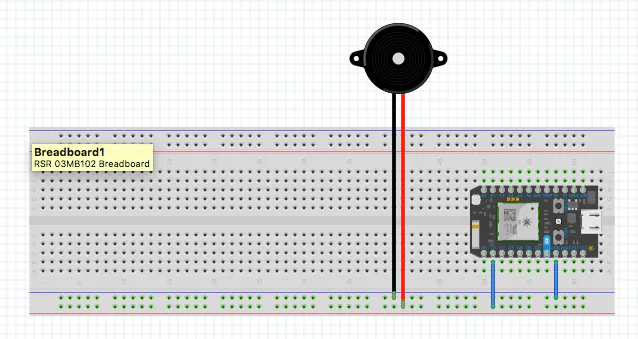
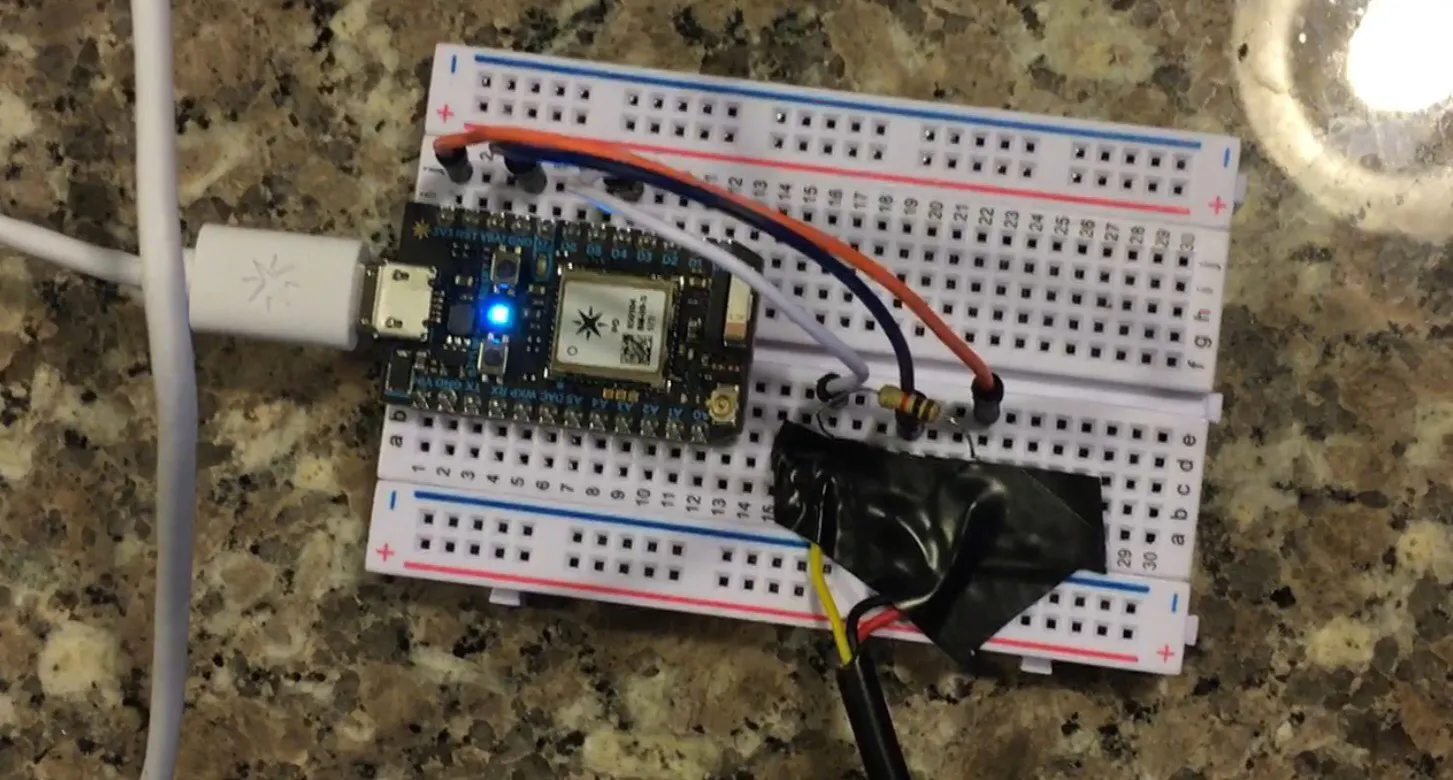
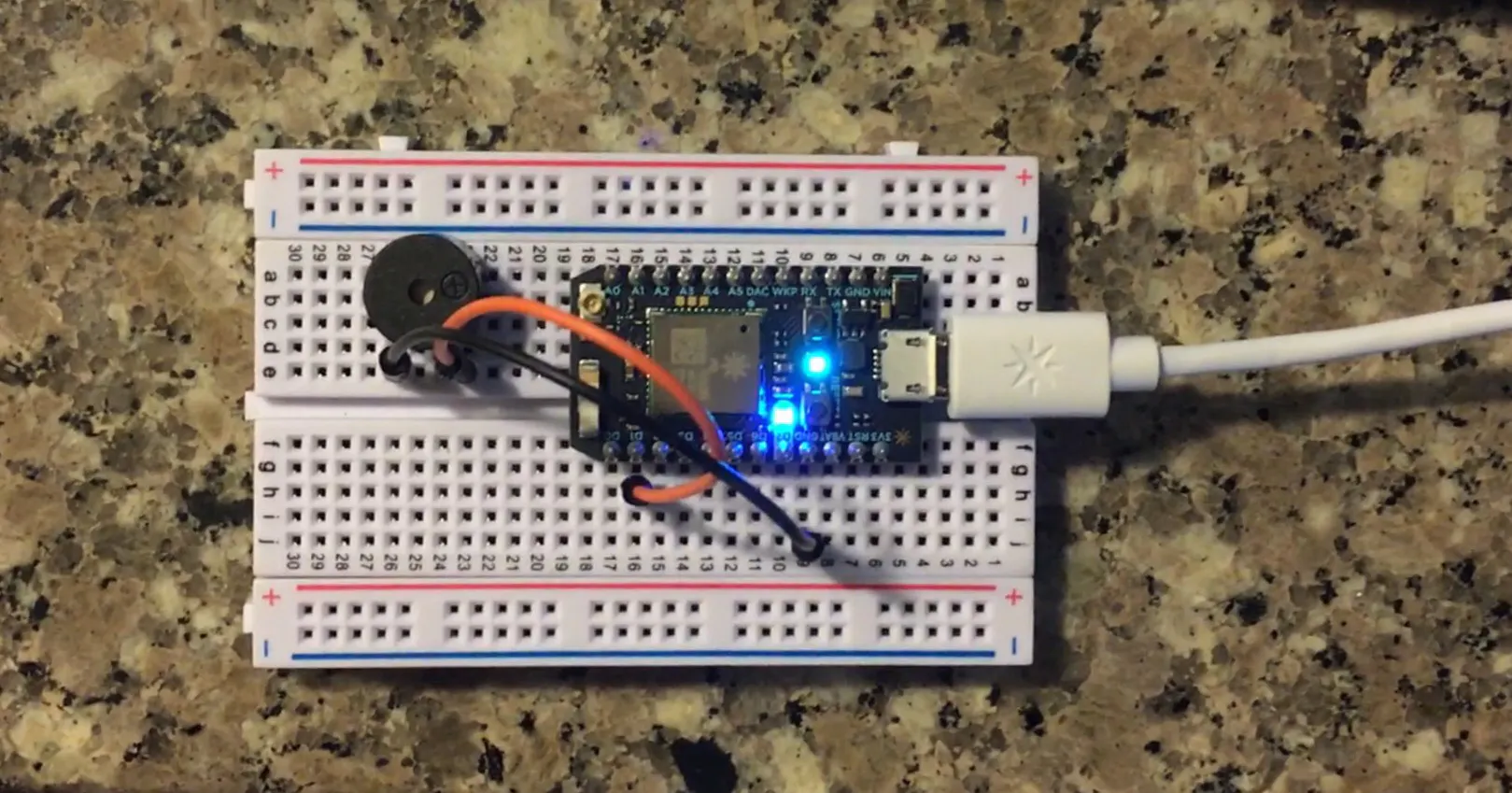
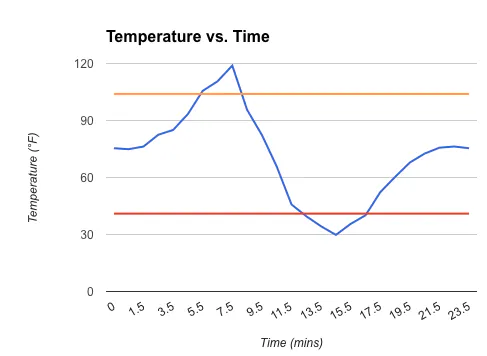
Our goal was to create a temperature sensor for a car's engine bay that could monitor high and low temperature extremes. We constructed our project using two particle photons, a temperature sensor probe and a buzzer. The first photon was connected to the probe in the temperature sensing circuit. This circuit published two events, one being a high temperature and the other being a low temperature. The alerting circuit was constructed with the second photon and the buzzer. When the high or low temperature event was published the D1 pin on the second photon was subscribed to do a DigitalWright(High) to send voltage to activate the buzzer. The system worked to its entirety but only to the extent of the Wi-Fi signal. Because of this, we were only able to test the system inside and were unable to test in an actual engine bay.
OneWire ds = OneWire(D4); // 1-wire signal on pin D4
unsigned long lastUpdate = 0;
float lastTemp;
void setup() {
Serial.begin(9600);
// Set up 'power' pins, comment out if not used!
pinMode(D3, OUTPUT);
pinMode(D5, OUTPUT);
digitalWrite(D3, LOW);
digitalWrite(D5, HIGH);
}
// up to here, it is the same as the address acanner
// we need a few more variables for this example
void loop(void) {
byte i;
byte present = 0;
byte type_s;
byte data[12];
byte addr[8];
float celsius, fahrenheit;
if ( !ds.search(addr)) {
Serial.println("No more addresses.");
Serial.println();
ds.reset_search();
delay(250);
return;
}
// The order is changed a bit in this example
// first the returned address is printed
Serial.print("ROM =");
for( i = 0; i < 8; i++) {
Serial.write(' ');
Serial.print(addr[i], HEX);
}
// second the CRC is checked, on fail,
// print error and just return to try again
if (OneWire::crc8(addr, 7) != addr[7]) {
Serial.println("CRC is not valid!");
return;
}
Serial.println();
// we have a good address at this point
// what kind of chip do we have?
// we will set a type_s value for known types or just return
// the first ROM byte indicates which chip
switch (addr[0]) {
case 0x10:
Serial.println(" Chip = DS1820/DS18S20");
type_s = 1;
break;
case 0x28:
Serial.println(" Chip = DS18B20");
type_s = 0;
break;
case 0x22:
Serial.println(" Chip = DS1822");
type_s = 0;
break;
case 0x26:
Serial.println(" Chip = DS2438");
type_s = 2;
break;
default:
Serial.println("Unknown device type.");
return;
}
// this device has temp so let's read it
ds.reset(); // first clear the 1-wire bus
ds.select(addr); // now select the device we just found
// ds.write(0x44, 1); // tell it to start a conversion, with parasite power on at the end
ds.write(0x44, 0); // or start conversion in powered mode (bus finishes low)
// just wait a second while the conversion takes place
// different chips have different conversion times, check the specs, 1 sec is worse case + 250ms
// you could also communicate with other devices if you like but you would need
// to already know their address to select them.
delay(1000); // maybe 750ms is enough, maybe not, wait 1 sec for conversion
// we might do a ds.depower() (parasite) here, but the reset will take care of it.
// first make sure current values are in the scratch pad
present = ds.reset();
ds.select(addr);
ds.write(0xB8,0); // Recall Memory 0
ds.write(0x00,0); // Recall Memory 0
// now read the scratch pad
present = ds.reset();
ds.select(addr);
ds.write(0xBE,0); // Read Scratchpad
if (type_s == 2) {
ds.write(0x00,0); // The DS2438 needs a page# to read
}
// transfer and print the values
Serial.print(" Data = ");
Serial.print(present, HEX);
Serial.print(" ");
for ( i = 0; i < 9; i++) { // we need 9 bytes
data[i] = ds.read();
Serial.print(data[i], HEX);
Serial.print(" ");
}
Serial.print(" CRC=");
Serial.print(OneWire::crc8(data, 8), HEX);
Serial.println();
// Convert the data to actual temperature
// because the result is a 16 bit signed integer, it should
// be stored to an "int16_t" type, which is always 16 bits
// even when compiled on a 32 bit processor.
int16_t raw = (data[1] << 8) | data[0];
if (type_s == 2) raw = (data[2] << 8) | data[1];
byte cfg = (data[4] & 0x60);
switch (type_s) {
case 1:
raw = raw << 3; // 9 bit resolution default
if (data[7] == 0x10) {
// "count remain" gives full 12 bit resolution
raw = (raw & 0xFFF0) + 12 - data[6];
}
celsius = (float)raw * 0.0625;
break;
case 0:
// at lower res, the low bits are undefined, so let's zero them
if (cfg == 0x00) raw = raw & ~7; // 9 bit resolution, 93.75 ms
if (cfg == 0x20) raw = raw & ~3; // 10 bit res, 187.5 ms
if (cfg == 0x40) raw = raw & ~1; // 11 bit res, 375 ms
// default is 12 bit resolution, 750 ms conversion time
celsius = (float)raw * 0.0625;
break;
case 2:
data[1] = (data[1] >> 3) & 0x1f;
if (data[2] > 127) {
celsius = (float)data[2] - ((float)data[1] * .03125);
}else{
celsius = (float)data[2] + ((float)data[1] * .03125);
}
}
// remove random errors
if((((celsius <= 0 && celsius > -1) && lastTemp > 5)) || celsius > 125) {
celsius = lastTemp;
}
fahrenheit = celsius * 1.8 + 32.0;
lastTemp = celsius;
Serial.print(" Temperature = ");
Serial.print(celsius);
Serial.print(" Celsius, ");
Serial.print(fahrenheit);
Serial.println(" Fahrenheit");
if(lastTemp < 5) {
String temperature = String(fahrenheit);
Particle.publish("Engine_Bay_Temp_Low!", temperature);
delay(30000);
}
if(lastTemp > 40) {
String temperature = String(fahrenheit);
Particle.publish("Engine_Bay_Temp_High!", temperature);
delay(30000);
}
// now that we have the readings, we can publish them to the cloud
String temperature = String(fahrenheit); // store temp in "temperature" string
Particle.publish("Engine_Bay_Temp", temperature); // publish to cloud
delay(30000);
}
int led = D7;
void setup()
{
pinMode(D1,OUTPUT);
pinMode(D7,OUTPUT);
digitalWrite(led,LOW);
Particle.subscribe("Engine_Bay_Temp_Low!", temperature, "myHandler");
Particle.subscribe("Engine_Bay_Temp_High!", temperature, "myHandler");
}
void temperature(const char *event, const char *data)
{
if ("Engine_Bay_Temp_High!")
digitalWrite(led,HIGH);
else
digitalWrite(led,LOW);
if (strcmp(data,"Engine_Bay_Temp_Low!"))
{
digitalWrite(D1,HIGH);delay(300);digitalWrite(D1,LOW);delay(200);digitalWrite(D1,HIGH);delay(100);digitalWrite(D1,LOW);delay(300);digitalWrite(D1,HIGH);
delay(200);digitalWrite(D1,LOW);delay(100);digitalWrite(D1,HIGH);delay(300);digitalWrite(D1,LOW);delay(200);digitalWrite(D1,HIGH);delay(100);digitalWrite(D1,LOW);
delay(300);digitalWrite(D1,HIGH);delay(200);digitalWrite(D1,LOW);delay(100);digitalWrite(D1,HIGH);delay(300);digitalWrite(D1,LOW);delay(2000);
digitalWrite(D1,HIGH);delay(300);digitalWrite(D1,LOW);delay(200);digitalWrite(D1,HIGH);delay(100);digitalWrite(D1,LOW);delay(300);digitalWrite(D1,HIGH);
delay(200);digitalWrite(D1,LOW);delay(100);digitalWrite(D1,HIGH);delay(300);digitalWrite(D1,LOW);delay(200);digitalWrite(D1,HIGH);delay(100);digitalWrite(D1,LOW);
delay(300);digitalWrite(D1,HIGH);delay(200);digitalWrite(D1,LOW);delay(100);digitalWrite(D1,HIGH);delay(300);digitalWrite(D1,LOW);delay(2000);
digitalWrite(D1,HIGH);delay(300);digitalWrite(D1,LOW);delay(200);digitalWrite(D1,HIGH);delay(100);digitalWrite(D1,LOW);delay(300);digitalWrite(D1,HIGH);
delay(200);digitalWrite(D1,LOW);delay(100);digitalWrite(D1,HIGH);delay(300);digitalWrite(D1,LOW);delay(200);digitalWrite(D1,HIGH);delay(100);digitalWrite(D1,LOW);
delay(300);digitalWrite(D1,HIGH);delay(200);digitalWrite(D1,LOW);delay(100);digitalWrite(D1,HIGH);delay(300);digitalWrite(D1,LOW);delay(2000);
digitalWrite(D1,HIGH);delay(300);digitalWrite(D1,LOW);delay(200);digitalWrite(D1,HIGH);delay(100);digitalWrite(D1,LOW);delay(300);digitalWrite(D1,HIGH);
delay(200);digitalWrite(D1,LOW);delay(100);digitalWrite(D1,HIGH);delay(300);digitalWrite(D1,LOW);delay(200);digitalWrite(D1,HIGH);delay(100);digitalWrite(D1,LOW);
delay(300);digitalWrite(D1,HIGH);delay(200);digitalWrite(D1,LOW);delay(100);digitalWrite(D1,HIGH);delay(300);digitalWrite(D1,LOW);delay(2000);
digitalWrite(D1,HIGH);delay(300);digitalWrite(D1,LOW);delay(200);digitalWrite(D1,HIGH);delay(100);digitalWrite(D1,LOW);delay(300);digitalWrite(D1,HIGH);
delay(200);digitalWrite(D1,LOW);delay(100);digitalWrite(D1,HIGH);delay(300);digitalWrite(D1,LOW);delay(200);digitalWrite(D1,HIGH);delay(100);digitalWrite(D1,LOW);
delay(300);digitalWrite(D1,HIGH);delay(200);digitalWrite(D1,LOW);delay(100);digitalWrite(D1,HIGH);delay(300);digitalWrite(D1,LOW);
}
else
{
delay(100);
}
}



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Comments