Pick & Place Robot using Wireless Bluetooth Controller Via Smart Phone
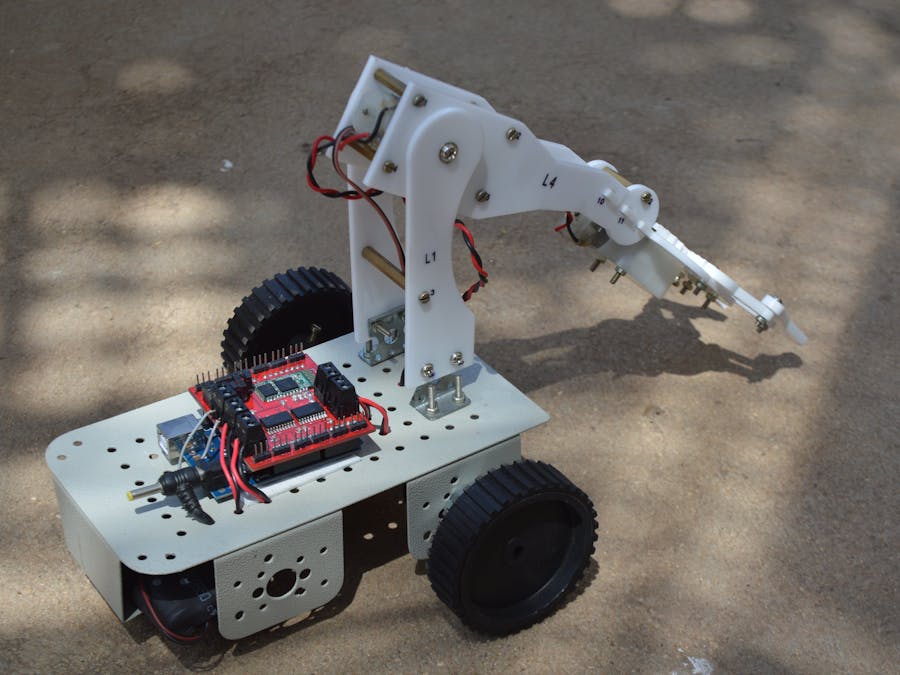
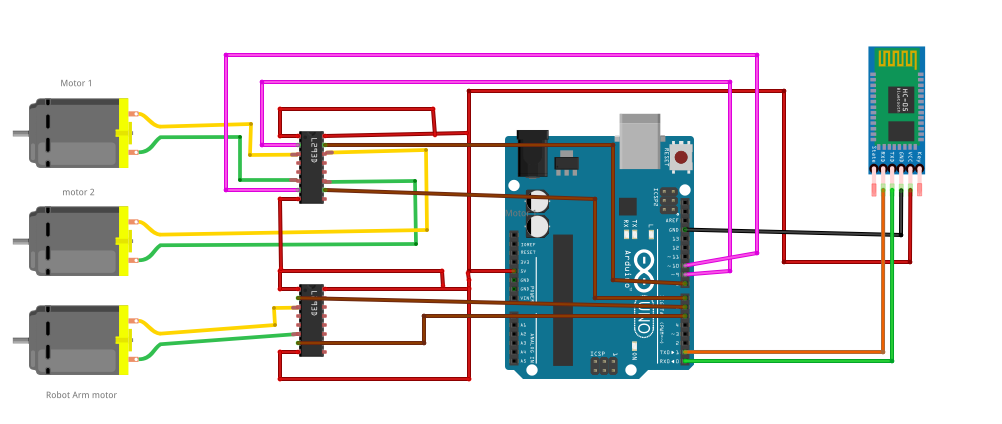
Pick & Place RobotIs controlled by an Android smart phone that establish a bluetooth communication to the robot. If any button is pressed a data corresponding to the button pressed is transmitted to robot via bluetooth. The robot receives these data with help of HC-05 in the robot. The received data is processed by the microcontroller. microcontroller a signals to the motor driver IC l293d which drives the motor in directions forward, reverse, left, right, pick, release, up, down, rotate left, rotate right.
Robot Set up
Android app to control the robot. Plz go to this following link to down the app (https://goo.gl/N0sLNZ)
Demo
BluBug ( www.twob.co.in )









_3u05Tpwasz.png?auto=compress%2Cformat&w=40&h=40&fit=fillmax&bg=fff&dpr=2)

{kind=link}
Comments