Scientific Problem:How can we model and predict the forming of thermokarst in the Arctic?
A Thermokarst is a kind of sinkhole that results from the melting of ground ice in a region underlain by permafrost. In areas that have a lot of ice, a thermokarst can form when the ice melts, causing the ground settles unevenly. The size and form of the hole depends on the nature and extent of the ice. In general, regional thermokarst activity indicates an overall warming of the climate.
Why should anyone care? Thermokarst indicate climate change, but also are of concern for roads and construction. If a building, road (or oil pipeline) is built on ground with permafrost layers, the melting of the permafrost can cause sink holes and damage infrastructure.
This is the thermokarst failure on a stream leading into the Toolik River on the day Breck Bowden and Michael Gooseff discovered it in 2003. (Courtesy of Michael Gooseff)
Breck Bowden explores the thermokarst failure on a stream leading into the Toolik River on the day he and Michael Gooseff discovered it in 2003. (Courtesy of Michael Gooseff)
Scientists would like to better understand how the thermokarst has developed, and predict its future state. One way to do this would require data that can be turned into 3D visualizations of the hole. LIDAR is a laser-based measurement technology for creating elevation models from the air; but aerial LIDAR lacks the resolution for an area of ground this small.
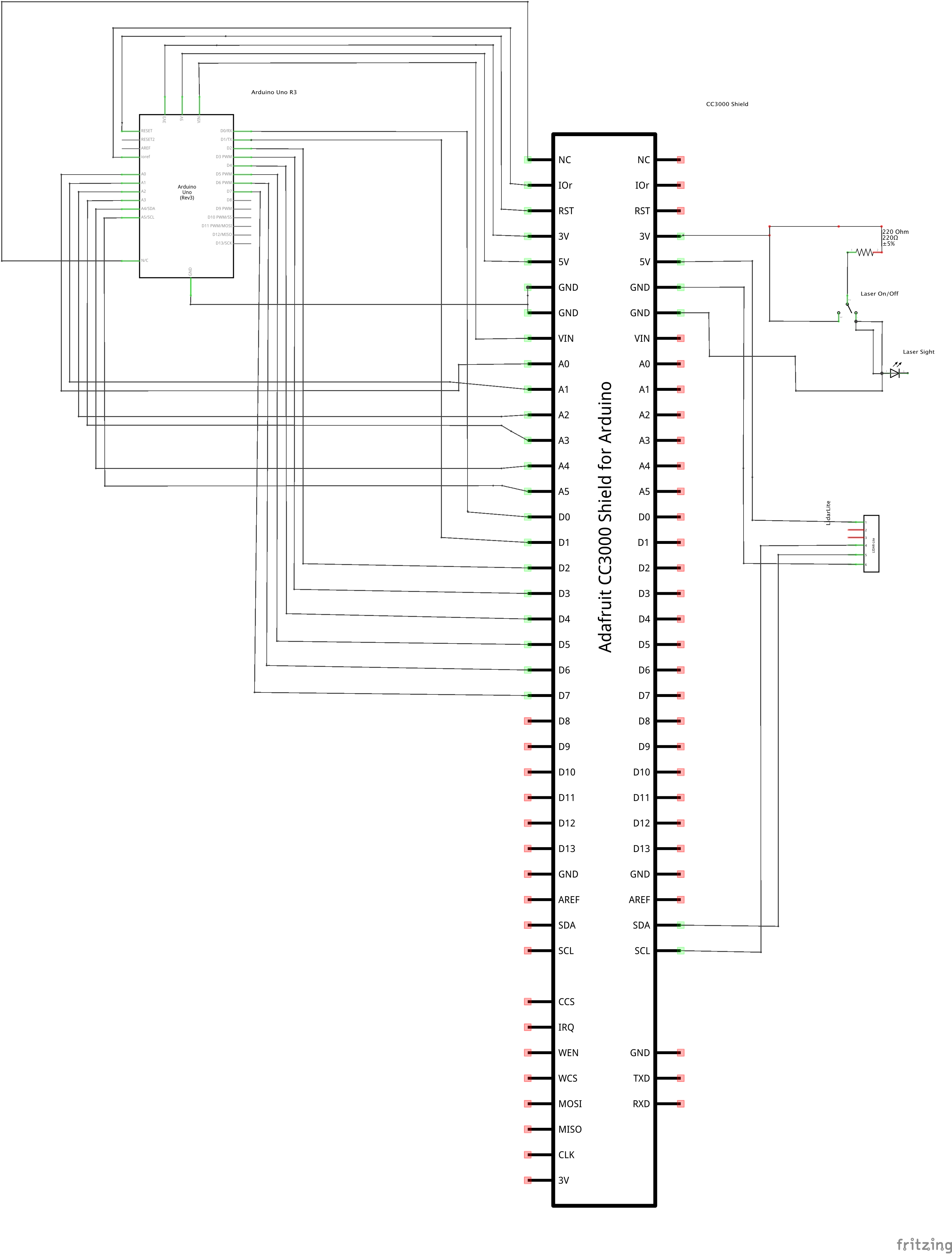
Thanks to Kickstarter and a company called pulsedlight3d.com, we can build an inexpensive hand-held measurement tool to take distance measurements over multiple areas of the thermokarst. The first phase of this project was to evaluate the accuracy of data collection using servo motors in a sweep pattern. It turned out the servos were not accurate enough to allow for the LIDAR data points to be rendered into a good 3D model. However, the next phase is to mount an array of the LidarLite sensors on a drone capable of autopilot navigation. The drone wouldn't even need to fly more than a few feet above the thermokarst, but would just need enough height to scan the hole in a grid pattern. As a side note, a stronger laser diode is needed for scoping purposes. I've already been playing around with a basic laser scope commonly used for firearms and the results in bright daylight are promising.
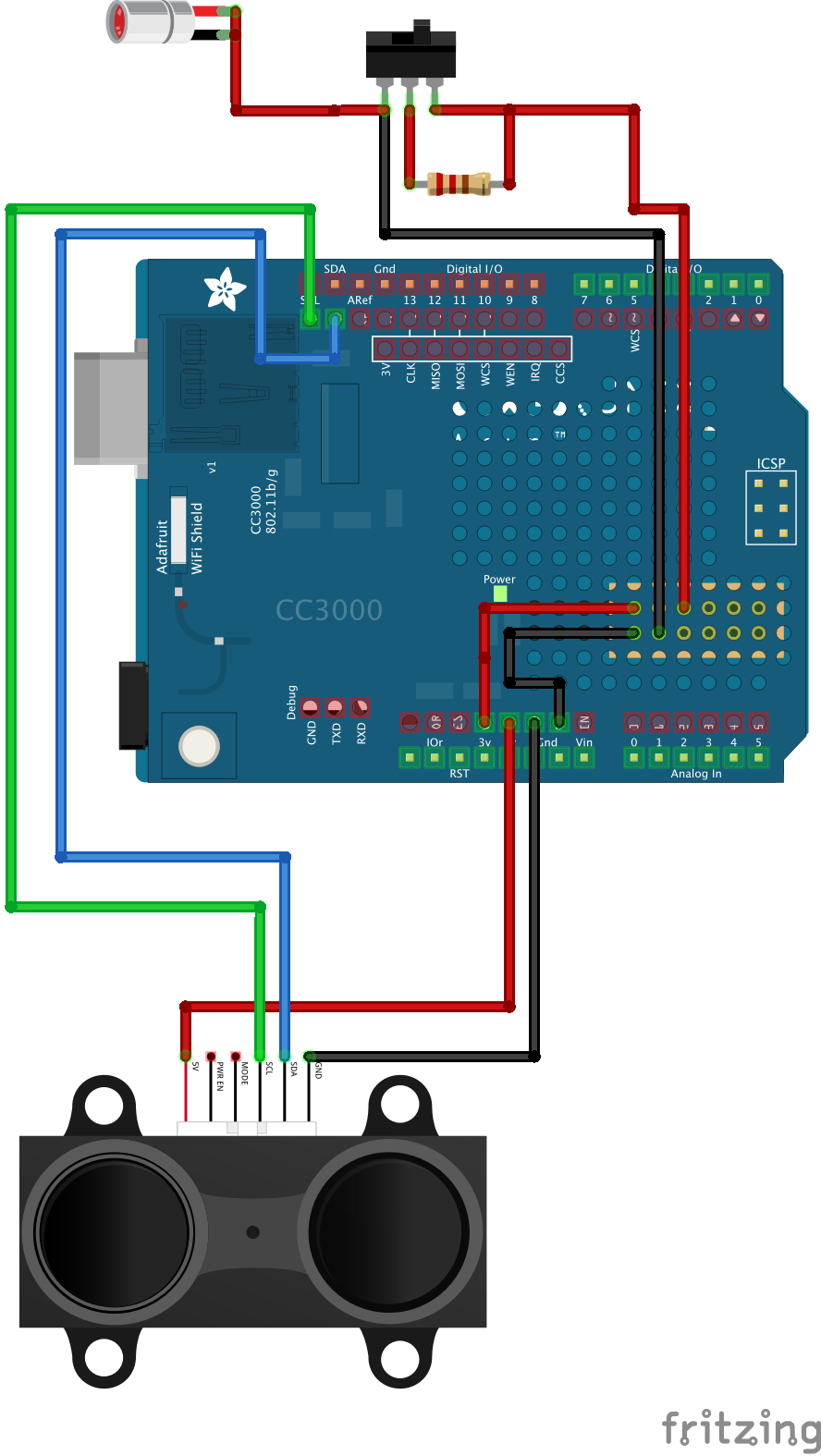
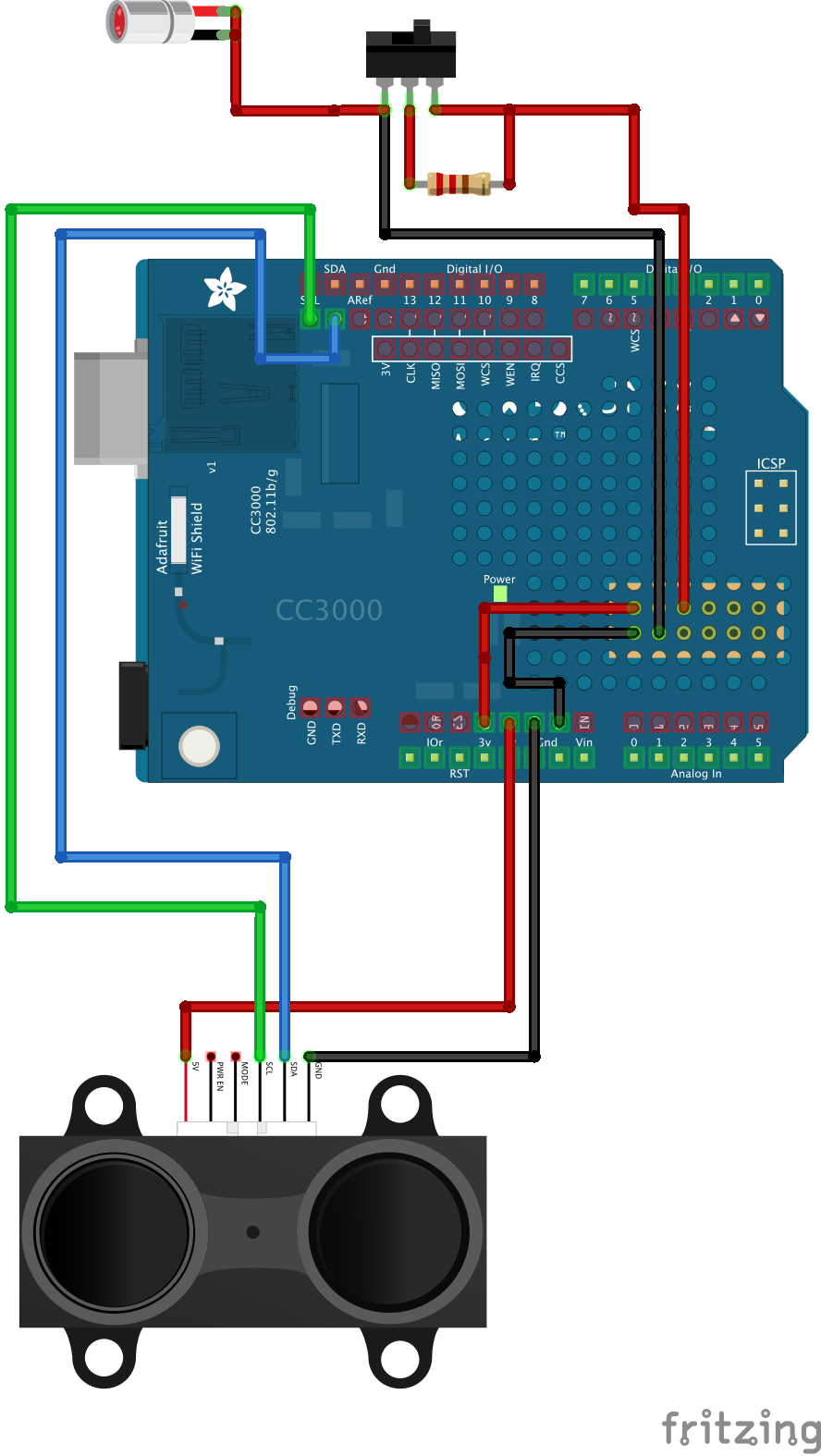
The LIDAR Anywhere DeviceLIDARAnywhere (front view)
The first version of the handheld LIDAR device was built in small dry box. I used a Dremel to carve out holes for the LIDAR sensor and laser sight to go through. I also installed a toggle button for turning the laser on/off. To make the mountings waterproof, I used Sugru compound. Data is transmitted over wifi to the Blynk mobile app.
Features:
- LIDAR distance measurement (accuracy about 1 cm) up to 30 m.
- Uses consumer-grade power pack, USB interface (for now)
- Real-time readings through Blynk UI
Blynk application for LIDARAnywhere (Android)
For phase II: Drone mounted array and both real-time and stored data options.
For more details on the thermokarst research itself, please visit: polarfield.com



_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff)












{kind=link}
{kind=link}
Comments